
半捷联惯性测量系统多路采集数据对齐方法*
2015-08-17 09:05刘秀锋刘一鸣
传感技术学报 2015年9期
刘秀锋,李 杰,2*,刘一鸣,杜 瑾,刘 俊,2,陈 伟
(1.中北大学电子测试技术国防科技重点实验室,太原030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原030051;3.山西北方惠丰机电有限公司科研设计二所,山西长治046012)
半捷联惯性测量系统多路采集数据对齐方法*
刘秀锋1,李杰1,2*,刘一鸣1,杜瑾1,刘俊1,2,陈伟3
(1.中北大学电子测试技术国防科技重点实验室,太原030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原030051;3.山西北方惠丰机电有限公司科研设计二所,山西长治046012)
半捷联惯性测量系统能实时精确测量弹体的各种飞行参数,为常规弹药精确制导提供可能,半捷联惯性测量系统包含两块采集数据的采存模块,当系统运行时,由于两个采存模块采集不同步以及取点不统一导致采集的数据不是实时同步,从而无法对系统测得的数据进行解算,本文提出一个实时对齐方法,利用数据相关性,求出差的平方和的最小值即为最接近的值,实现数据对齐,为后续精确解算奠定基础。
半捷联;采集数据;惯性测量;数据对齐
EEACC:7230doi:10.3969/j.issn.1004-1699.2015.09.018
常规高旋弹药制导化的前提是准确获取弹丸飞行过程中的姿态和位置信息,即实时精确测量弹体的各种飞行参数成为提高常规弹药制导化的关键技术,对增强高旋弹药的精确打击具有重要的意义[1-2]。
针对高旋弹药初始飞行时刻具有高加速度和高转速的特点,一种具有横滚隔离功能的半捷联MEMS惯性测量系统[3]被应用于高旋弹药的姿态测量。半捷联惯性测量系统与被测载体在俯仰与偏航轴捷联,滚转轴向上不捷联,通过动力输出使惯性测量系统在滚转轴向所敏感到的角速率远小于弹体实际滚转角速率,有效抑止弹体滚转轴向高转速对惯性测量系统中滚转角速率测量精度的影响[4]。
该系统通过MIMU敏感弹体的姿态信息,采用FPGA控制模数转换器采集MIMU数据到FPGA中以一定格式编码,最终存储到FLASH中,这个模块简称为采存模块,实现弹体发射到落地过程中飞行参数的实时准确记录[5],它是常规弹药飞行参数测试的重要组件。如图1所示。

图1 MIMU和采存模块
1 半捷联惯性测量系统数据采集
1.1系统总体组成结构及原理
半捷联惯性测量系统由控制驱动模块、动力输出模块、MIMU(Micro Inertial Measurement Unit MIMU)采存模块组成(如图2所示),图2中,将60 r/s量程陀螺(以下简称大陀螺)安装在弹体的轴向上,实时测量高速旋转武器弹药的角速率,将采集得到的转速信号实时转化为控制无刷直流电机的PWM脉冲信号,通过电机驱动器控制电机以相反的角速率转动,实现弹体中惯性测量系统减旋的目的。惯性测量系统中的MIMU与电机轴向捷联,此时处于低转速状态,就可以将低量程高精度的MEMS惯性器件应用于高旋药的姿态测量,有效提高了高旋弹药的测量精度[6-7]。

图2 半捷联惯性测量系统框图
1.2数据采集原理
采存模块由电源模块、调理模块、AD转换模块、FPGA控制模块、FLASH存储模块组成[8]。
1.2.1电源模块
采存设计中用到的电源转换芯片为REG104-5 和max8882EUTAQ,电路图如图3所示。
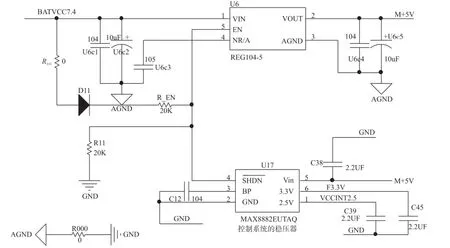
图3 电源模块电路图
考虑到ADS8365和系统其他芯片的功耗,模拟供电部分采用了TI公司的低压差线性稳压(LDO)型电源REG104-5。REG104-5是TI公司生产的高功率、高性能的电压转换芯片,噪声低,输出的噪声峰-峰值不大于33 μv,可以用来给功耗比较大的芯片供电,能够满足此系统的需求[9]。MAX8882EUTAQ输入电压范围电压为2.5 V~6.5 V,在适用电压范围内可以将5 V电压转换为标准的3.3 V和2.5 V电压。
1.2.2信号调理模块
在电子系统中,信号调理的作用是根据系统对信号的要求,对信号做适当的处理。信号调理模块通常包括模拟信号放大、滤波、隔离、电平转换等提高驱动能力等不同的处理。本设计信号调理电路采用OPA4340增强输入信号的驱动能力。
1.2.3AD转换模块
TI公司的ADS8365主要特点有:6通道并行输入;芯片内部具有可选的FIFO工作模式;16位的A/D,采集精度高;正常工作时功耗为200 mW,功耗低。ADS8365有6个模拟输入通道,分为A、B、C三组,每组包括2个通道,分别由/HOLDA、/HOLDB、/HOLDC启动A/D转换。ADS8365的时钟信号由外部提供,转换时间为20个时钟周期,最高频率为5 MHz,在5 MHz的时钟频率下,每个通道的总的转换时间为4 μs。数据输出方式很灵活,分别由BYTE、ADD与地址线A2、A1、A0的组合控制。转换结果的读取方式有3种:直接读取、循环读取和FIFO方式[10]。图4为AD转换电路图。

图4 AD转换模块电路图
1.2.4FPGA控制模块
本系统中采用的FPGA是Xilinx公司生产的XC2S30E。XC2S30E是Spartan-ⅡE系列产品中的一款。由于这款FPGA采用了低内核电压,这将从根本上减小芯片功耗,从而解决高速工作状态下发热量大的问题。同时其丰富的门阵列资源,也为复杂控制逻辑的实现提供了可能[11]。如图5所示。
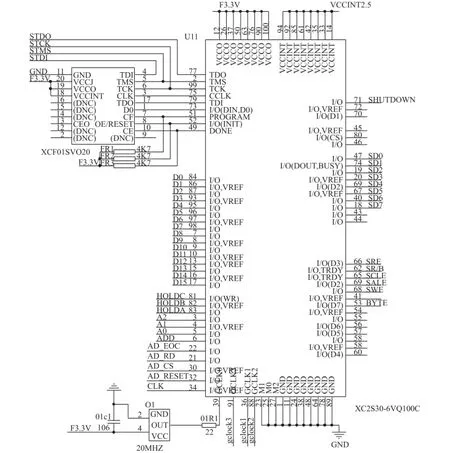
图5 FPGA控制模块电路图
1.2.5FLASH存储模块
FLASH存储器选用的是K9F2G08,电路如图6所示。
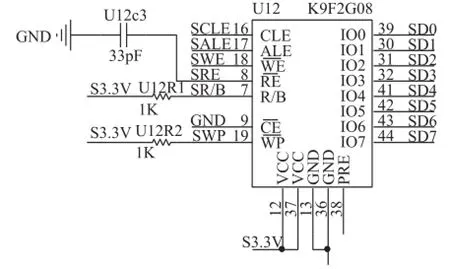
图6 FLASH存储模块电路图
2 采存模块实时数据采集不同步分析
由于高速旋转的弹药在初始飞行时刻具有高加速度和高转速的特点,此时瞬时测得的数据会超过MIMU的量程,严重影响后续解算,所以需要增加一个大量程的加速度计和陀螺仪来弥补这部分数据,由于本系统所用数据采集模块采用TI公司的16位六通道高速同步模数转换芯片ADS8365,所以需要两块采存模块同时采集,但是当系统运行时,由于两个采存板采集不同步以及取点不统一导致采集的数据不是实时同步,从而无法对系统测得的数据进行精确解算。
3 实时采集数据对齐原理
由于数据不同步所以需要一种方法将实时采集数据对齐。
3.1硬件设计原理
采存模块A采集MIMU的6路数据,采存模块B除了采集大量程的加速度计和陀螺数据外,同时对MIMU的一个测量数据进行采集(比如对MIMU的x轴的陀螺数据进行采集),如图7所示,将采集的数据进行读取、分析,对采集的同一数据进行截取、对齐后,其他数据也实现了数据的对齐(同一模块数据采集为同步),此时所有的多路采集数据实现对齐。

图7 硬件设计原理图
3.2程序设计原理
确定采存模块A采集的数据的固定窗口宽度和位置,取采存模块B采集的同一数据的滑动窗口的起始位置和宽度,考虑到最小二乘法是一种数学优化技术,当滑动窗口移动时,通过计算两个数据差的平方和最小值,显示差的平方和最小值和所在的位置,通过最小值所在的位置和固定窗口宽度的差值,截取对应的采存模块的数据,从而实现两个采集模块实时采集数据对齐。程序流程图如图8所示。

图8 数据对齐流程图
4 实验结果
通过高速飞行仿真转台模拟弹体运动,偏航为0°,俯仰轴从45°到-45°匀速变化,启动时间为2 s,横滚角由0变速加到-5 400(°)/s。如图9所示,对数据进行采集、存储和读取,图10为仿真系统MIMU同一数据不同采集模块的数据采集结果。
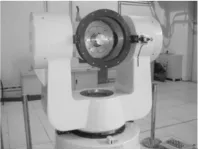
图9 模拟仿真系统

图10 数据采集结果不同步
利用最小二乘法对数据进行运算,进而对数据进行截取,从而实现实时采集数据的对齐,结果如图11所示。

图11 实时采集数据对齐结果
将对齐数据进行解算得出惯性测量系统减旋后的三轴姿态信息如图12所示。60 s偏航角小于0.5°,满足系统的精度要求。
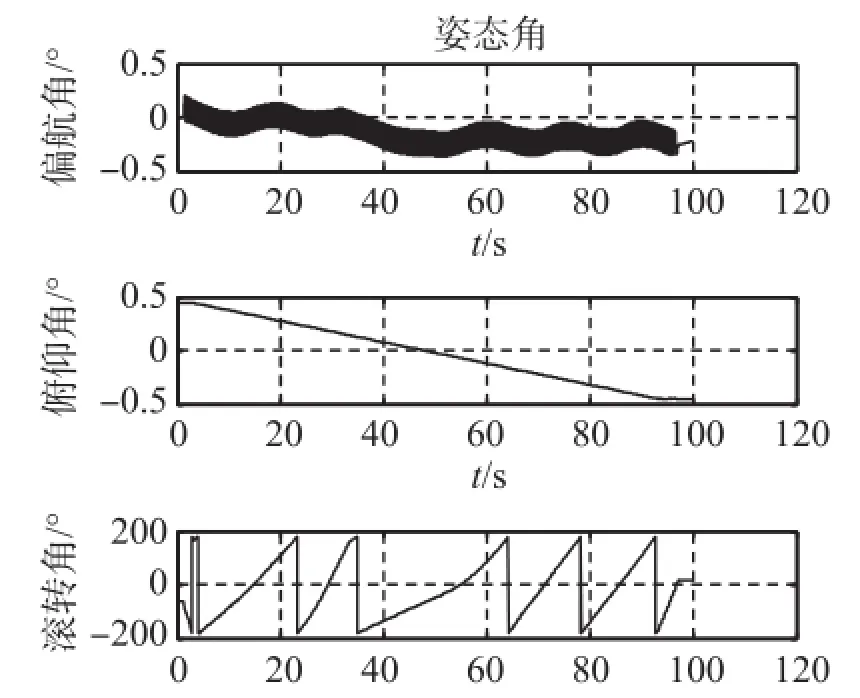
图12 三轴姿态信息
5 结束语
本系统能够利用多个采存模块对多个量程的传感器进行实时准确采集存储,有效的弥补了高旋弹药初始飞行时刻的传感器的超量程问题,本文利用数据相关性,求出差的平方和的最小值,实现实时采集数据对齐,该数据能完整的记录系统飞行仿真测试在各阶段的姿态和加速度信息,为后续的高旋常规武器弹药精确制导奠定基础。
[1] 李杰,马幸,刘俊,等.小型惯导系统数据实时采集处理与存储设计[J].中国惯性技术学报,2008(6):274-277.
[2] 李杰,刘俊,张文栋.微型惯性测量装置[J].仪器仪表学报,2006(27):1450-1451,1462.
[3] 刘俊,石云波,李杰.微惯性技术[M].北京:电子工业出版社,2005,11.
[4] 李杰,洪惠惠,张文栋.MEMS微惯性测量组合标定技术研究[J].传感技术学报,2008,21:1169-1173.
[5] 赵诣,李杰,刘喆,等.旋转弹用MEMS惯性测量组合数据硬回收系统设计[J].传感技术学报报,2012,25(9):1251-1256.
[6] 胡士峰,马建仓.基于MEMS陀螺和加计的微惯性测量单元研制[J].航空计算技术,2008(36):115-118.
[7] 张松,李杰,祝敬德,等.半捷联MEMS惯性测量系统电磁干扰抑制技术研究[J].传感技术学报,2013(10):1370-1373.
[8] 张松,李杰,赵诣.半捷联MEME惯性测量装置数据硬回收系统设计[J].传感技术学报,2013(9):1219-1223.
[9] 姚宗,文丰,张文栋,等.基于FPGA的多通道数模信号实时采编存储系统[J].计算机测量与控制,2010,18(7).
[10]Tian X C,Li J,Fan Y B,et al.Design and Implementation of SPI Communication Based-on FPGA[C]//AEMT,2011(4):2658-2661.
[11]雷明,马游春,李锦明,等.基于FPGA的多通道图像采集存储系统设计[J].通信技术,2010,43(4):204-207.
[12]杨志勇,文丰,郝晓剑.基于Flash存储器的抗高过载电子记录器关键技术研究[J].国外电子测量技术,2009,28(7):27-29.

刘秀锋(1988-),男,山西岚县人,硕士研究生,主要研究方向为微系统集成及自动控制技术,sliuxiufeng@163.com;

李杰(1976-),男,教授,博士生导师,主要研究方向为微系统集成理论与技术,惯性感知与控制技术,组合导航理论,计算几何及智能信息处理等,lijie@nuc.edu.cn。
The Alignment Method of Multi-Channel Data on Half-Strapdown Inertial Measurement System*
LIU Xiufeng1,LI Jie1,2*,LIU Yiming1,DU Jin1,LIU Jun1,2,CHEN Wei3
(1.North University of China Science and Technology on Electronic Test&Measurement Laboratory,Taiyuan 030051,China 2.Key Laboratory of Instrumentation Science&Dynamic Measurement(North University of China),Ministry of Education,Taiyuan 030051,China;3.Shanxi North Huifeng Mechanical&Electronic Co.,Ltd No.2 Academic Institution,Changzhi Shanxi 046012,China)
Semi-strapdown inertial measurement system can realize real-time accurate measurement of projectile flight parameter,and provide the possibility for the precise guidance of conventional ammunition,Semi-strapdown inertial measurement system includes two blocks of data acquisition sampling module.As for the two acquisition and storage module asynchronous sampling,and take some disunity,which leads to the collection of the data is not real-time synchronization when the system running.Thus,we are unable to calculate the system measured data. This paper presents a real time alignment method,use the data correlation,deduce the minimum value and for travel is the most close to the values of the square.Finally,we realizedata alignment,which lay the foundation for follow up exact solution.
semi-strapdown;data acquisition;inertial measurement;data alignment
TJ760.6
A
1004-1699(2015)09-1373-06
项目来源:国家自然科学基金项目(50905169)
2015-3-31修改日期:2015-06-10
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10
数学大王·趣味逻辑(2022年3期)2022-03-17
中学生数理化·中考版(2021年4期)2021-07-22
源流(2021年11期)2021-03-25
小天使·一年级语数英综合(2020年3期)2020-12-16
小天使·一年级语数英综合(2020年2期)2020-02-04
汽车维修与保养(2019年2期)2019-06-19
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
