
基于Cruise的纯电动客车仿真分析
2015-07-24 03:20徐达伟
武汉理工大学学报(信息与管理工程版) 2015年2期
徐达伟,回 春
(1.武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北武汉430070;2.武汉理工大学汽车零部件技术湖北省协同创新中心,湖北武汉430070)
随着环境污染和能源匮乏加剧,纯电动客车作为一种公共交通工具,已经渐渐进入日常生活中。纯电动客车由于噪声低、“零污染”和能源转换率高等优点,受到各大汽车生产厂商的关注。通常车辆经济性、动力性的评价是由实车的道路测试或台架试验得到的。由于发动机与动力系统匹配方案和各部件的参数变化多样,若每个方案都经过实车试验,不仅会增加大量的费用,而且会延长设计周期。因此,在产品开发设计的初级阶段,为了缩短开发周期、降低成本,利用计算机对车辆的各部件进行建模,对各种不同的路况进行模拟仿真,从而找到最佳方案。Cruise作为一款先进的整车仿真模拟分析软件,目前被各大公司广泛应用。
1 纯电动客车动力系统组成
纯电动客车的动力性主要由动力总成系统来决定;而其经济性由续驶里程决定。纯电动客车的动力总成系统主要包括电动机、电池、变速器、主减速器、差速器,以及车轮等[1],如图1所示。

图1 纯电动客车的整车模型
按电力驱动子系统组成和布置形式的不同,纯电动客车驱动类型分为机械传动型、无变速器型、无差速器型和电动轮型4种类型。笔者采用机械传动型,保留了内燃机汽车的传动系统,将发动机换成了电动机,这样可以提高纯电动客车的起动转矩及低速时的后备功率,对驱动电动机要求相对较低,选择电动机的灵活性增大。
2 车辆动力性及经济性分析
2.1 动力性
纯电动客车的动力性主要用最高车速、加速时间和最大爬坡度3个指标来评价。
(1)最高车速分析。最高车速指在水平良好路面上汽车所能达到的最高行驶车速,主要由汽车的驱动力和行驶阻力来决定[2]。
驱动力为:

式中:Ft为驱动力;Ttq为发动机转矩;ηT为机械效率;ig为变速器速比;io为主传动比;r为滚动半径。
阻力为:

式中:Ff为滚动阻力;Fw为空气阻力;f为滚动阻力系数;G为汽车总质量;CD为空气阻力系数;A为迎风面积;ua为行驶车速。
因此,最高车速可从汽车的驱动力-行驶阻力平衡图中得到,Ft曲线与Ff和Fw曲线的交点即是纯电动汽车的最高车速vmax。
然而在选用较大功率的牵引电动机或大传动比的设计中,并不是利用交点求最高车速,而是通过电动机的最高转速nmax求得。

式中,itmax为传动系统最大传动比。
(2)爬坡性能分析。爬坡性能指汽车在良好路面上克服滚动阻力和空气阻力后,其后备功率在稳定车速条件下(忽略加速阻力)全部用来爬坡时所能爬上的最大坡度。

式中:i为汽车爬坡度;Ig为汽车各档传动比;D为动力因素。
(3)加速性能分析。加速性能指汽车在良好路面上,克服空气阻力和滚动阻力后,其后备功率全部用来提高汽车车速的能力。

式中:d u/d t为加速度;δ为旋转质量换算系数。
2.2 经济性
经济性评价指标是以某一车速或循环工况为基础,用汽车行驶一定的里程数或者一定里程的能量消耗来评价的。纯电动汽车的经济性评价指标包括续驶里程、单位里程能量消耗和单位能耗行驶里程等。
笔者主要讨论纯电动客车的续驶里程。续驶里程是纯电动客车在蓄电池充满电的状态下,按一定的行驶功率,能连续行驶的最大距离。
(1)电机功率。汽车以速度v(取40 km/h)等速行驶时所需的电机功率Pi为:

(2)电池额定能量为:

式中:Ue为电池的端电压;Q为电池的额定容量。
(3)续驶里程。在理想状态下,等速行驶的续驶里程S为:

3 Cruise运行流程及仿真内容
Cruise能对不同类型的汽车进行建模和分析,得到汽车的相应性能指标,同时进行汽车性能优化,且可模拟实际的汽车和道路,降低试验成本[3]。
3.1 Cruise运行流程
(1)根据整车的构成,在建模窗口添加所需的模块,如发动机、变速器、主减速器、制动器和车轮等零部件模块;
(2)利用各个部件相应的参数对模块的参数进行设置;
(3)根据整车各部件的动力及信号的传递关系对部件进行物理和电气连接;
(4)根据研究需要,设置相应的计算任务,如最大爬坡度、加速时间、最大车速和续驶里程等。
3.2 Cruise仿真内容
(1)循环工况分析。用于计算循环工况(如UDC、NEDC等)中油耗(耗电量)和排放的情况。
(2)爬坡性能分析。用于计算汽车的最大爬坡度。可以计算不同挡位下汽车的不同爬坡度。
(3)稳态行驶工况分析。用于计算汽车稳定行驶时燃油消耗量和排放量[4]。该任务计算每一挡位下,整个发动机转速范围内汽车的性能,通过改变主传动比计算理论和实际最高车速。
(4)满负荷加速性能计算。最大加速度指对于每一个挡位,在发动机转速范围内的最大加速度。原地起步加速性能指在连续换挡条件下,汽车原地起步的加速性能。超车加速性能指由某一起始车速,在某一挡位下加速到目标车速时的加速性能。
4 利用Cruise进行仿真分析
4.1 纯电动客车的参数
(1)纯电动客车的整车参数如表1所示。

表1 整车参数
(2)电池参数如表2所示。

表2 电池参数
(3)电动机参数如表3所示。
利用Cruise软件建立的电机特性曲线如图2所示。输出转矩的正区域为驱动特性,负区域为发电机特性[5]。在低速区域,电机具有恒转矩特性;在高速区域,电机具有恒功率特性。在960 r/min附近为电机恒转矩和恒功率的切换点。

表3 电动机参数

图2 电机的转矩和转速特性曲线
4.2 设计要求
设计纯电动客车的要求如表4所示。

表4 纯电动客车设计要求
4.3 整车仿真模型
汽车动力传递路线为电机→变速器→主减速器→差速器→车轮,在 Cruise中建立汽车模型[6],如图3所示。然后对各个模块的参数进行设置。其中驾驶室模块14根据人体反应真实地再现车辆的行为;函数模块18、19和常数模块21是为了回收刹车时的制动力;监视器模块20是为了获得汽车在行驶时的数据[7]。根据仿真要求,选择和编辑相应的任务,并进行仿真计算[8]。
4.4 循环工况
由于该车型为纯电动客车,因此选用综合性能评测较均衡的新欧洲循环工况(new European driving cycle,NEDC)作为测试工况[9]。图 4 所示为纯电动客车仿真行驶距离、加速度和速度随时间变化的曲线。汽车在行驶过程中分为加速、巡航和减速3个阶段[10]。整个过程中速度变化比较平稳。由图4可知,该循环周期为1 190 s,最大行驶速度为107 km/h,平均行驶速度为36 km/h。
4.5 爬坡性能
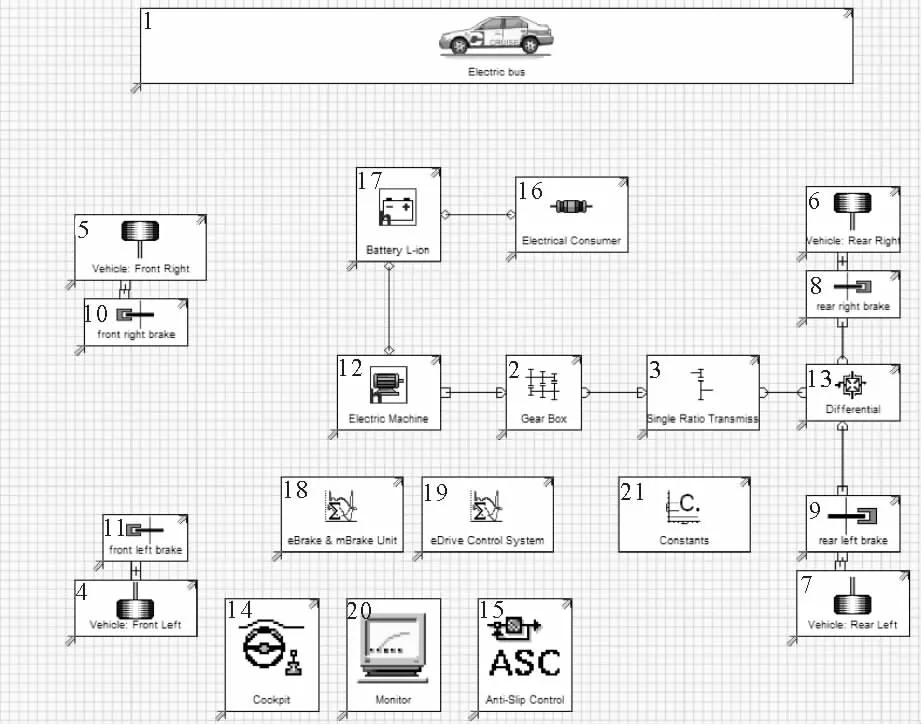
图3 纯电动汽车Cruise整车模型

图4 纯电动客车仿真行驶距离、速度和加速度随时间变化曲线图
汽车最大爬坡度决定了汽车的爬坡性能,是一项重要的动力性指标。由图5可知,该车型最大爬坡度约为22%,符合动力性指标≥20%的要求。该车的爬坡性能良好,满足一般道路行驶要求。
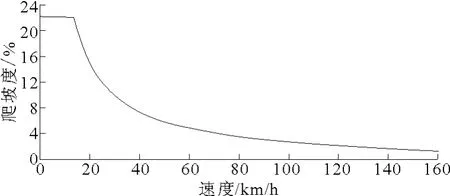
图5 爬坡度曲线
4.6 加速时间和最高车速
由图6可知,该车型0~50 km/h加速用时19 s,基本满足加速时间≤20 s的指标。由电机的特性可知,低速输出转矩大,获得的加速度大,0~90 km/h加速时间较短,约为70 s;而在高转速时输出转矩小,汽车从90 km/h加速到100 km/h时间较长。从速度曲线可以看出,该车的最高速度维持在107 km/h左右,达到了最高车速≥80 km/h的要求。整体来说,该车型基本满足了客车的道路行驶要求。
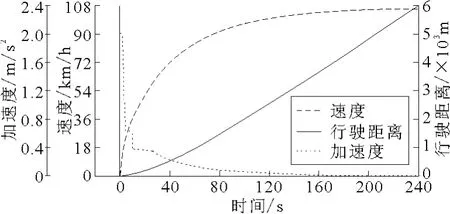
图6 0~50 km/h全负荷下纯电动客车仿真行驶距离、速度和加速度随时间变化曲线
4.7 续驶里程
续驶里程指电池经过一次充放电所能使汽车行驶的最大距离。在 Cruise中建立车速为40 km/h的匀速行驶工况,使该工况的时间足够长,直到电池电量消耗完。因此,电池SOC的变化对应的距离就是续驶里程。由图7可知,续驶里程为54 km,满足续驶里程≥50 km的要求。

图7 40 km/h的匀速行驶工况下电池SOC随距离变化的曲线
5 结论
通过Cruise软件建立的某纯电动客车模型仿真,并对该车的动力性和经济性进行分析。仿真结果表明,该车在0~50 km/h加速时间为19 s,满足加速时间≤20 s的要求;爬坡性能为22% >20%,符合实际要求;最高速度维持在107 km/h左右,满足最高车速≥80 km/h的要求;续驶里程为54 km>50 km,满足行驶要求。利用Cruise软件建模仿真可以缩短研发周期,节约研发成本,减少车辆在设计上的盲目性。仿真结果为实车试验提供了重要的参考数据。
[1]姜海斌,黄宏成.CRUISE纯电动车动力性能仿真及优化[J].机械与电子,2010(4):61-64.
[2]袁苑.基于CRUISE中型纯电动客车动力匹配仿真[J].农业装备与车辆工程,2012,50(5):15 -21.
[3]吴雪.纯电动轿车动力系统参数匹配方法研究[D].长春:吉林大学图书馆,2013.
[4]刘新.纯电动汽车动力参数匹配与仿真研究[D].重庆:重庆交通大学图书馆,2013.
[5]李军.基于CRUISE的某型大客车动力传动系统优化匹配研究[D].长春:吉林大学图书馆,2013.
[6]许世维.纯电动客车动力系统参数优化与联合仿真[D].西安:长安大学图书馆,2013.
[7]刘小飞.纯电动轿车动力系统参数匹配及电机控制策略研究[D].长春:吉林大学图书馆,2011.
[8]朱鹏飞,赵文杰,许宏云.基于CRUISE纯电动汽车匹配计算与仿真[J].新能源汽车,2012(9):11-15.
[9]余志生.汽车理论[M].北京:机械工业出版社,2009:33-105.
[10]严运兵.电动汽车概论[M].北京:机械工业出版社,2012:19-65.
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
装备制造技术(2018年8期)2018-10-17
上海师范大学学报·自然科学版(2018年3期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04
车迷(2017年12期)2018-01-18
作文周刊·小学一年级版(2017年27期)2017-08-10
中国宝玉石(2017年2期)2017-05-25
中共南昌市委党校学报(2017年1期)2017-05-04
中国宝玉石(2017年1期)2017-03-24
科技创新与应用(2016年36期)2017-02-21
