
无人机航测成图概况
2015-07-21 21:04龙午
科技资讯 2015年16期
龙午
摘要:随着我国现代化步伐的加快,无人机航拍具有的优点,注定其将在我国各行业建设事业中发挥重要作用,本文通过介绍无人机开展航拍所需具备的基本要素和航拍数据采集流程,以及最终形成符合要求的大比例尺地图的数据设计,为无人机的应用做了概况性介绍。
关键词:无人机 航测 数据采集
中图分类号:TV211文献标识码:A 文章编号:1672-3791(2015)06(a)-0000-00
1 引言
无人机航测作为对信息数据采集的一种方式,与传统的数据采集及更新方式相比,无人机航摄系统拥有低成本、高效率,快速及时获取高分辨率大比例尺影像的优势,是传统数据采集及更新方式的有效补充。其拥有对天气的适应性强、拍摄成图精度高、同时间内无人机拍摄覆盖面比传统作业大、拍摄成本也比传统作业低的四个优点。可以采集0.05m、0.1m、0.2m等各种分辨率的正射影像图,经过处理后,可以制作符合国家标准的1:500、1:1000、1:2000、1:5000等各种比例尺的地形图。可以广泛应用于国家重大工程建设、灾害应急与处理、国土监察和应急救灾测绘数据获取等方面。
2 无人机航测系统组成
无人机航测系统由硬件系统和配套软件二部分组成,其中硬件系统由五部分组成:无人机飞行平台、传感器(数码相机)、飞控系统、地面监控系统与遥控器以及地面运输与保障系统,主要是保障对数据的采集。配套软件部分主要有曝光点设计软件、航摄质量快速检查软件、影像预处理软件,主要是对采集的数据进行处理。最终生成符合国家标准的各种比例尺地形图。
3 无人机航测成图流程
本文无人机航测以基于数码相机的超轻型飞机航空摄影测量仪器成图为例。相比于基于全站仪的传统数字测图方法,无人机航测具有大视角、高精度、云下拍摄、无需专用机场、低成本、高效率等特点,在国土资源管理及其他各领域工作中具有很大的潜力。
无人机航测用于测图主要分为数码相机的检校、航摄外业测量及内业数据处理3个步骤。
3.1 数码相机检校:数码相机为非量测相机,光学畸变大。理想成像条件下,像点、投影中心和相应地面点间应该满足共线条件方程式,受摄影物镜的光学畸变、CCD不平整等因素的影响,使得像点、相机的投影中心和地面坐标的共线方程受到破坏,其结果势必影响摄影测量的精度。检校是基于多片空间后方交会的数学解算模型,该模型以共线条件方程为基础,把控制点的物方空间坐标视为真值,整体求解像片内方位元素、多张像片外方位元素及附加参数。
3.2 外业测量:包括布置控制点、影像获取及影像质量检查三个步骤。布置控制点可采用常规测量手段来获取其坐标(通过GPS测量、像片联测、空三等方法),分为全野外布点和非全野外布点,全野外布点精度较高,但外业工作量很大;非全野外布点野外只测定少量控制点主要由内业采用电算加密所得。影像采集直接采用大面阵数码相机来获取;数据质量检查通过影像拼接软件完成,在现场即可判断影像拍摄是否成功,以便决定是否需要重飞某条航线或补拍某些像片。
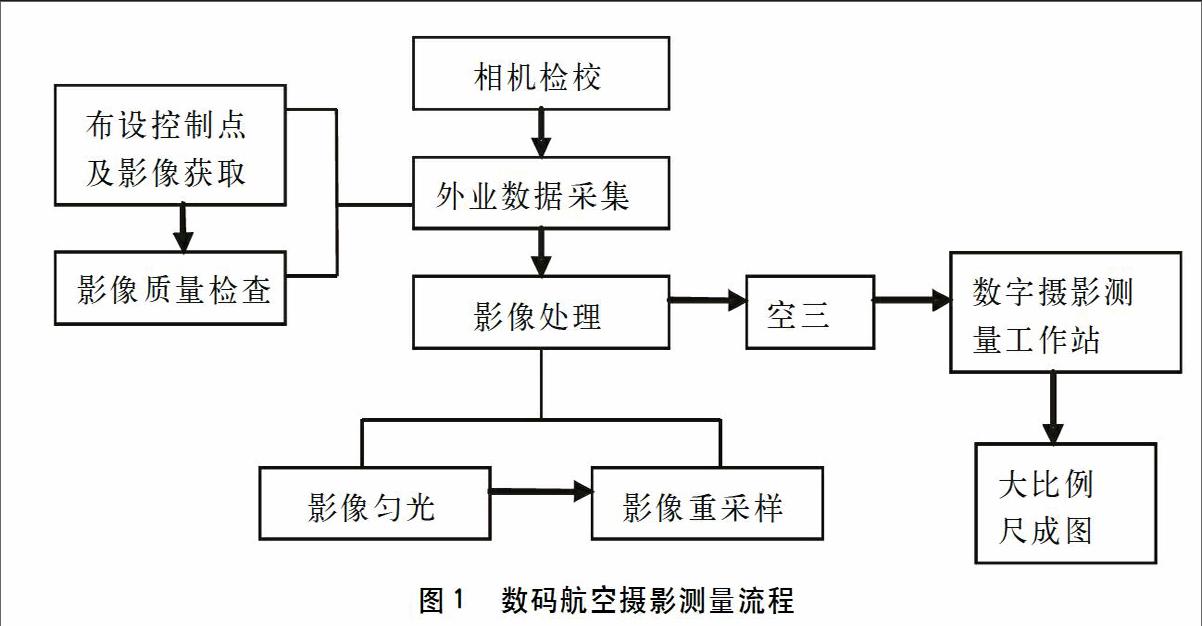
3.3 内业数据处理:主要包括影像零级处理及成图,零级处理包括影像匀光与影像重采样。利用空三加密软件对零级处理后的影像进行空三加密,并在数字摄影工作站上最终获取大比例尺图或其他产品。如下图所示。
数码航空摄影测量流程
4 成图比例尺的确定
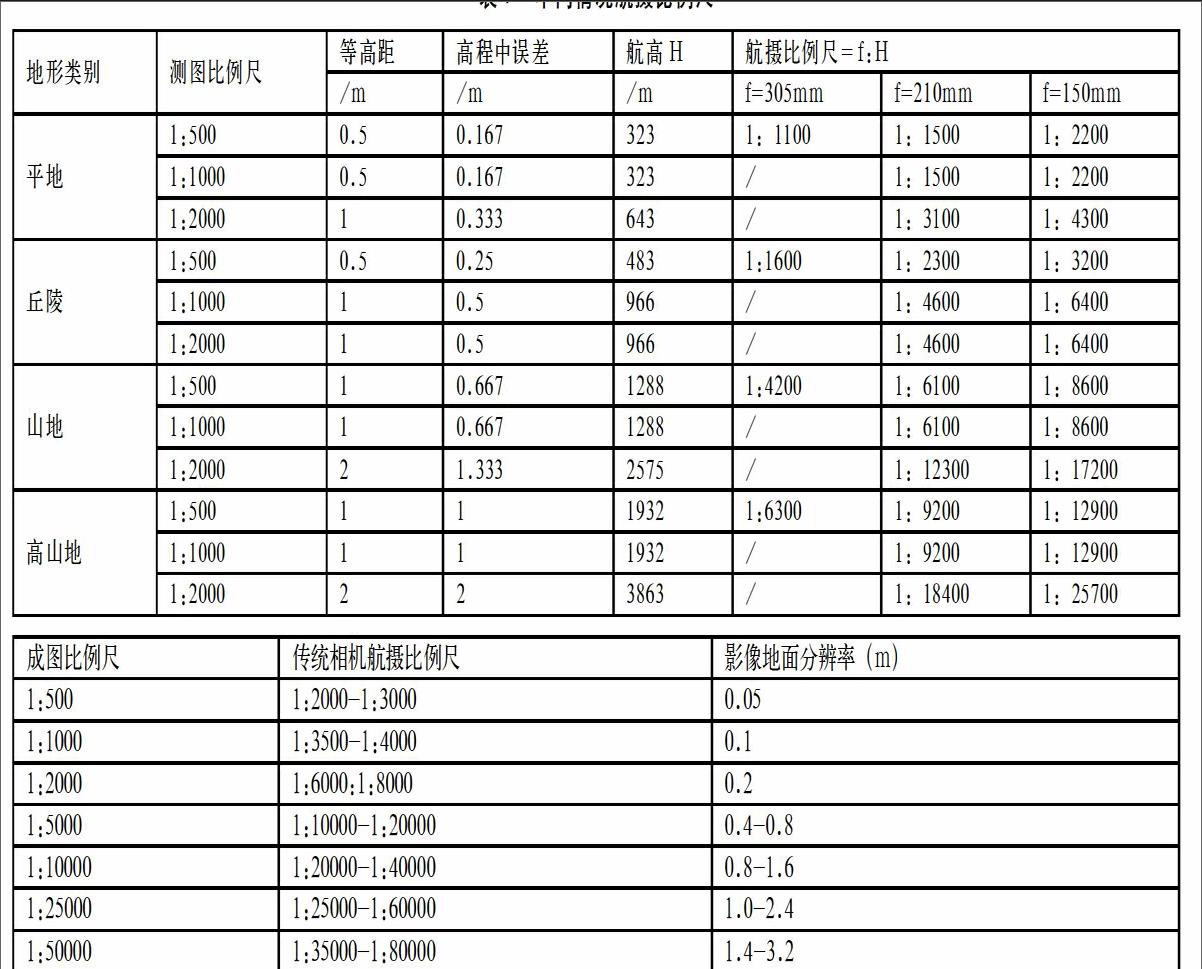
航测比例尺是航测像片上的线段长度与相应实地水平距离之比,由焦距与航高之比来确定。通过对测图进行放大到可得到1:500、1:1000等成图比例尺。
地形图的精度主要体现在平面精度方面。航测比例尺对平面精度的影响不太显著,而着重要考虑的是其对高程精度的影响,即航摄比例尺对高程中误差的影响,依据不同高程中误差计算相应航高,然后用航摄机焦距f与航高h之比,即可求得相应的航摄比例尺。
不同情况航摄比例尺
5 结语
与传统数据采集手段相比,无人机航测具有机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短等多项特点,但同时作为与传统的数据采集完全不同的一种生产方式,其也有着对作业硬件、软件有更高投入和对操作人员素质有更高要求的特点。随着我国各行业、各领域加快信息化建设步伐的要求,无人机的应用必将得到更进一步的提升。
参考文献:
[1] 刘洋,祁琼,无人机航摄技术在国土资源领域的应用地理空间信息 2014(2)
[2] 李军,盛新薄,夏志宇,无人飞行器低空摄影技术探讨 测绘科学2011(4)
[3] 洪宇,龚建华,胡社荣,黄明祥,无人机遥感影像获取及后续处理探讨 遥感技术与应用2008(8)
猜你喜欢
农业与技术(2016年15期)2016-11-09
科技视界(2016年18期)2016-11-03
人间(2016年26期)2016-11-03
软件工程(2016年8期)2016-10-25
软件工程(2016年8期)2016-10-25
科技视界(2016年22期)2016-10-18
中国新通信(2016年16期)2016-10-18
企业导报(2016年9期)2016-05-26
