
浅析步进电机的选择与使用
2015-07-16 14:10:46焦伟
科技资讯 2015年6期
焦伟
摘 要:步进电动机通常被用作定位控制和定速控制,不超载时,它的停止方向和转速的情况由脉冲数目以及频率决定,其中存在着线性的关系,所以在控制領域应用十分广泛。它实质上是一种变磁阻式、将电脉冲信号转化为角位移的执行机构。该文重点介绍了步进电机的特点、步进电机的选型方法,希望对广大读者有所帮助。
关键词:步进电机 选择 使用
中图分类号:TM383.6 文献标识码:A 文章编号:1672-3791(2015)02(c)-0256-01
步进电动机通常被用作定位控制和定速控制,不超载时,它的停止方向和转速的情况由脉冲数目以及频率决定,其中存在着线性的关系,所以在控制领域应用十分广泛。
1 工作原理
它是一种变磁阻式、将电脉冲信号转化为角位移的执行机构。工作时,首先步进驱动器会收到脉冲信号,电机会随之转动一个固定的角度(即步距角),旋转方向是设定好的。正是由于旋转方向和角度的固定,所以脉冲信号对转过的角度有直接控制作用,从而保证定位的精确;同时步进电机转动的速度和加速度都可以由脉冲信号的频率来控制,从而实现对速度的控制。输入脉冲信号总数与电机总回转角度成正比,其频率也决定了相应的转速。步进电动机主要用于一些有定位要求的场合。例如:自动上下料转台、机器人滑台等。步动电动机有多种励磁方式,如永磁式、反应式和混合式(又叫感应子式),另外,相数方面也有多种,如单相、两相、三相和多相等。
2 主要特点
(1)通常电机精度是步进角的3~5%,且不累积。
(2)步进电机的动态响应快,易于起停、正反转及变速。
(3)步进电机的力矩会随转速的升高而下降,因此步进电机难以获得较大的转矩。
(4)电机的响应通过输入脉冲来确定,为简化电机结构和降低成本,常采用开环控制。
3 如何选择
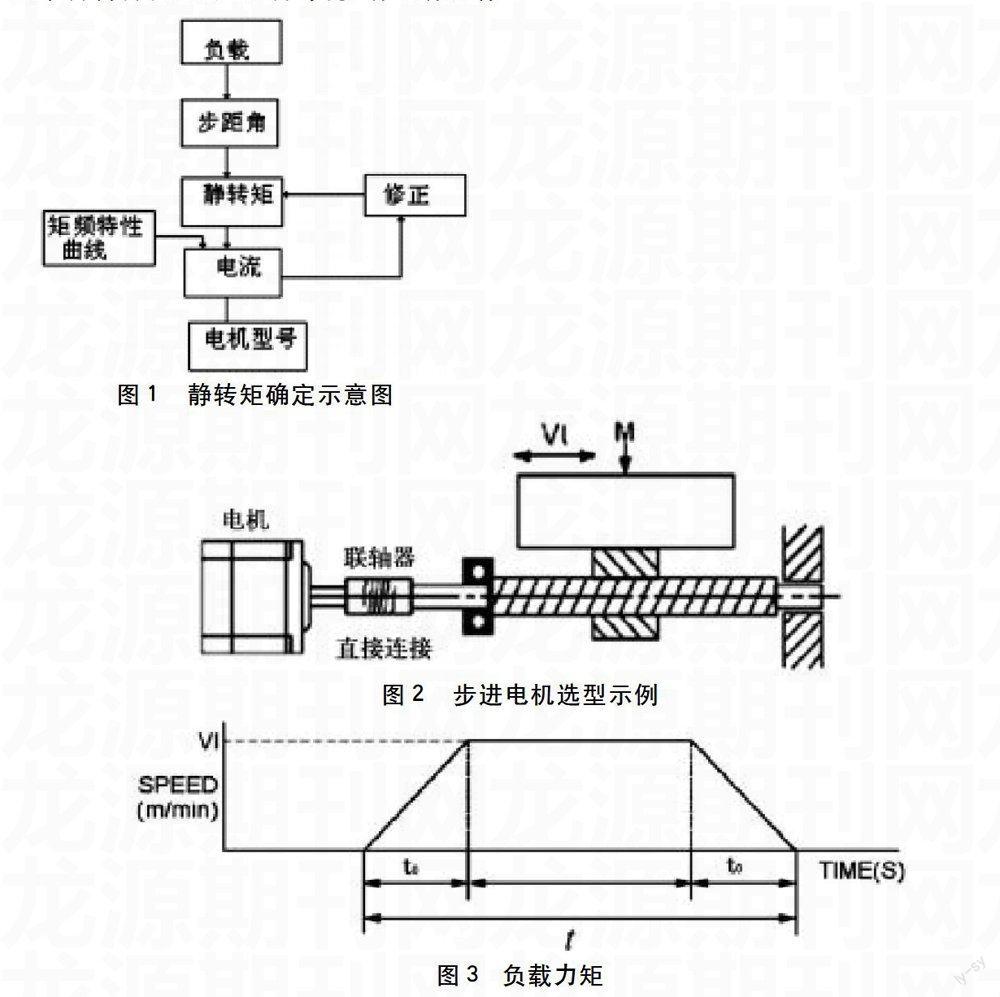
第一,要考虑根据负载所需要的功率来选择步进电机,保证电机的输出功率大于负载所需的功率。因此,计算机械系统的负载转矩是首要步骤。具体分为三种情况,摩擦负载和惯性负载通常在电机直接起动时都要考虑;惯性负载则在加速起动时要着重考虑;摩擦负载在恒速运行时要予以考虑。具体应用过程中,步进电机的静转矩一般为摩擦负载的2~3倍,要确定电机的电子座及长度,只要将静转矩确定下来即可(如图1)。
第二,应使步距角和机械系统需求相一致。系统负载所要求的最小分辨率是可以换算到电机轴上的,具体就是此时电机应走过的角度,步进电机的步距角应不大于该角度。一般情况下,步进电机的步距角有1.5°/3°(三相)、0.36°/0.72°(五相)等。
第三,要特别重视电机的转速。电机的输出转矩与转速成反比:电机低速运转时,输出转矩较大,在高速运转时转矩就很小了。具体工况下要求高速电机时,必须对电动机的线圈电阻、电感等加以测量。通常,要获得较大的输出转矩,需选择电感稍小的电机做高速电机。反之,则最好选择电感在十几或几十mH,电阻大一些的电机。
第四,根据计算出的转矩和转速,对照步进电机的矩频曲线图,确认选择步进电机是否合理。
下面给出的是一个步进电机选型的计算示例,可以更好地理解电机选型的计算方法(如图2)。
图2中所示的是一种典型的由步进电机驱动的滚珠丝杠滑台,已知丝杠直径=20mm,导程=5mm,丝杠长=0.5m,负载M=10kg,联轴器重量=0.1kg,直径=40mm,机械效率η=0.9,摩擦系数μ=0.1;往复运动速度=3.6m/min,定位时间t=1s,加减速时间占比=0.1s。根据条件,初选某型号电机静力矩T=1.5N·m,电机惯量=0.001kg·m2。
则(1)负载力矩0.017N·m(如图3);
(2)总负荷转动惯量JM++kg·m2;
(3) 启动转矩==0.45N·m;
其中电机转速n==360rpm;
(4)必须转矩=2×(+)=0.93N·m
根据计算结果,对照步进电机的矩频曲线图,选择步进电机合理。
参考文献
[1] 赵先仲.机电一体化系统[M].北京:高等教育出版社,2010.
[2] 汪诤.机电一体化技术[M].北京:国防科技大学出版社,2009.
[3] 许晓峰.电机及拖动[M].北京:高等教育出版社,2007.
猜你喜欢
科学家(2016年3期)2016-12-30 00:32:48
电子技术与软件工程(2016年22期)2016-12-26 12:46:20
电子技术与软件工程(2016年19期)2016-12-19 18:27:00
艺术科技(2016年9期)2016-11-18 19:52:31
艺术科技(2016年9期)2016-11-18 18:07:46
中国科技博览(2016年22期)2016-11-01 14:03:21
新闻前哨(2016年10期)2016-10-31 17:41:16
职业(2016年10期)2016-10-20 22:22:45
课程教育研究·学法教法研究(2016年21期)2016-10-20 19:02:22
科技视界(2016年22期)2016-10-18 15:53:02
