
液压驱动盾构主驱动泵故障分析与处理
2015-07-10 12:32:36王营建
建筑机械化 2015年1期
王营建
WANG Ying-jian
(中铁隧道集团二处有限公司,河北 三河 065201)
液压驱动盾构主驱动泵故障分析与处理
Fault analysis and processing of hydraulic shield main drive pump
王营建
WANG Ying-jian
(中铁隧道集团二处有限公司,河北 三河 065201)
以海瑞克液压驱动泥水平衡盾构为例,通过在盾构始发调试期间对主驱动泵故障的排查与处理,对盾构主驱动系统的早期预防及日常保养提出了相关建议,以最大限度地提高盾构主驱动泵的使用寿命,避免因主驱动的失效而造成工程停工等重大损失。
盾构;主驱动泵;故障分析
盾构主驱动类型分电力驱动和液压驱动两种,对于液驱盾构主驱动而言,主驱动泵起到输出流量和压力的作用,相当于是盾构主驱动系统的“心脏”。在实际使用中,主驱动故障的早期预防、常规保养,直接影响着盾构的使用机况,了解和重视主驱动系统的工作原理和维护保养,有助于提高主驱动系统核心部件的工作寿命,降低施工成本。
1 盾构主驱动液压系统介绍
南昌某地铁项目使用的德国海瑞克泥水平衡盾构,其主驱动系统为泵-马达闭式液压回路,由2台并联的斜盘式轴向柱塞变量泵和7台并联的轴向柱塞马达组成。系统附带补油泵、控制泵等原件。整个系统为电液比例调速,恒功率保护方式。其中液压泵型号为A4VS6750HD1/22R-PPH10N009N,其原理如图1所示。
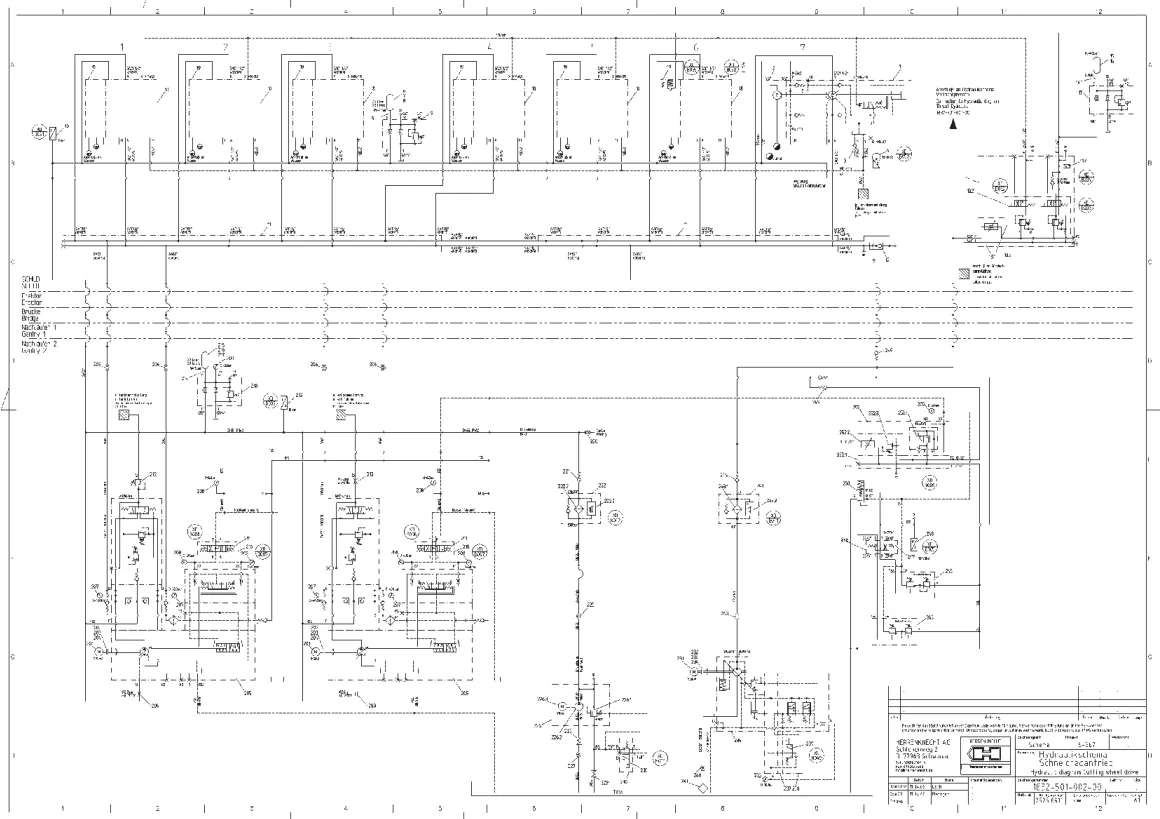
图1 盾构主驱动液压原理图
2 主驱动泵故障及原因分析
2.1 故障现象
盾构主驱动系统调试期间,刀盘转动相关互锁条件满足后,在刀盘刹车已松开、刀盘转速和旋向电信号还没给的前提下(其中刀盘旋向控制电磁阀已被拆除,以确保没有电信号),只启动刀盘主驱动2#泵时刀盘就会自转,此时主驱动2#泵A口压力20bar、B口压力120bar,斜盘角度为-5°,主驱动1#泵不存在此现象。反复试之,故障现象依旧存在。
2.2 原因分析
当刀盘转向电信号还没给时,则刀盘转向控制电磁阀处于中位状态,此时X1和X2处的先导控制油压力都为零(先导控制油回油箱卸荷),那么液动比例换向阀两侧因没有压力作用而处于中位状态。在这种情况下,主驱动泵内部的伺服油缸也是处于中位状态的,即使启动主驱动泵,主驱动泵斜盘倾角仍然自动归零、无流量输出,主驱动系统没有产生流量、自然也不会产生压力来驱动刀盘转动,原理如图2所示。
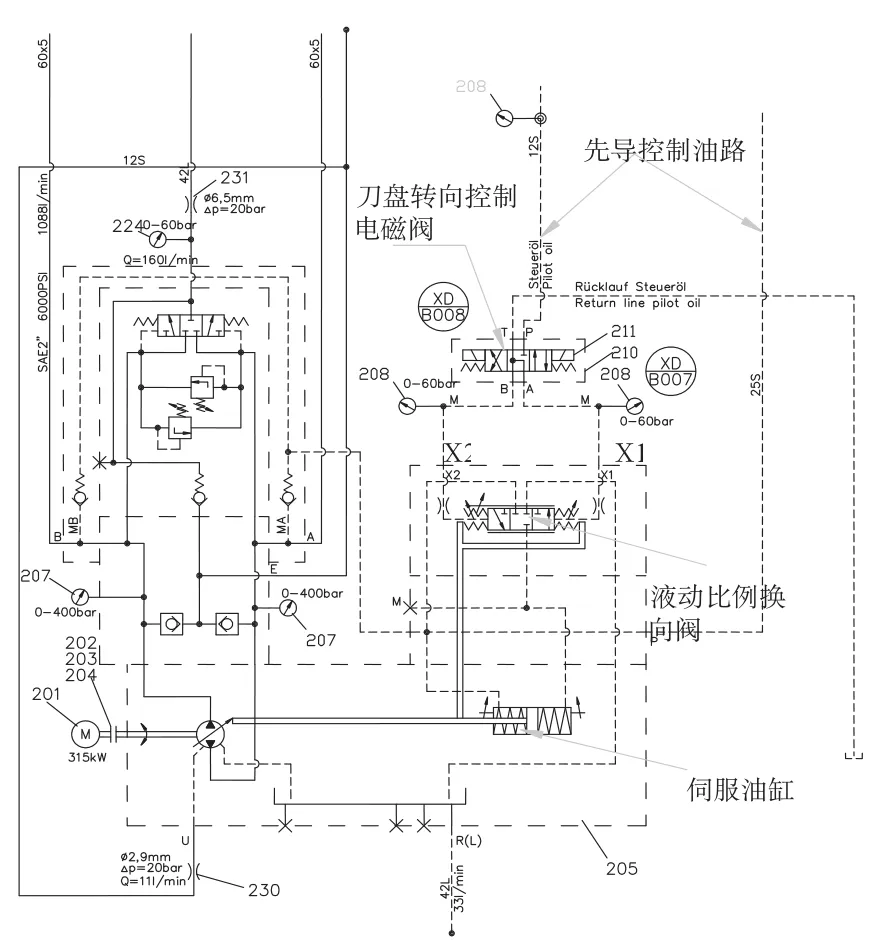
图2 主驱动泵液压原理图
厂家售后服务技术人员来现场对2#刀盘驱动泵斜盘倾角进行调零,方法:启动先导控制泵和刀盘驱动泵后,通过机械调节三位三通液动比例换向阀两端的节流阀,使X1和X2处的先导控制压力相等,达到使斜盘倾角归零的目的。经过几次的调整,刀盘斜盘倾角在初始状态下仍然不为零。根据主驱动故障现象及结合图2分析,可能是液动比例换向阀或者伺服油缸自身出现机械故障导致主驱动泵斜盘倾角在初始状态下不能自动归零所致。
3 处理措施
根据主驱动泵故障原因初步分析,将主驱动泵返厂进行拆检,拆检结果判断为伺服油缸非正常磨损所致,如图3所示,由于进口元件精度较高,为了确保万无一失,最后从同类型泵上拆卸下新的配件重新研磨装配到原有泵上。在后续使用过程中,主驱动泵初始状态下斜盘倾角不归零位的故障得到解决。

图3 伺服油缸
4 结论与建议
通过这次对主驱动泵初始状态不归零位的故障分析和处理,笔者有以下几点体会及建议:①盾构技术人员必须熟悉液压原理图,这样才能快速、准确地找出盾构液压故障的根源所在;②对于进口液压元件本身而言,其故障率很低,大多数盾构液压系统故障都是油液污染导致液压元件损坏,即使油液污染程度不高,液压系统元件在长期运行后也会产生非正常磨损现象;③对于施工超过5km以上的盾构,在投入使用前建议将核心液压部件上液压测试平台上进行检测,提早发现问题,防范于未然;④在盾构始发和后续掘进过程中,一定要重视油水管理,加强油水检测的力度和强度,一旦检测到油样不合格,必须立即更换新油。
[1]易 朋.盾构机主驱动常见故障分析[J].科技与企业,2013,(6):273.
[2]吴根茂.新编电液比例控制技术[M].杭州:浙江大学出版社,2006.
(编辑 张海霞)
TU621
B
1001-1366(2015)01-0074-02
2014-11-03
猜你喜欢
机械工程师(2023年11期)2023-12-09 02:45:30
装备制造技术(2021年4期)2021-08-05 07:39:40
冶金设备(2020年2期)2020-12-28 00:15:34
科学咨询(2020年53期)2020-03-19 07:41:46
商品与质量(2019年22期)2019-11-29 02:41:40
科学导报·学术(2019年44期)2019-09-10 22:25:45
纤维复合材料(2018年2期)2018-12-07 00:41:42
隧道建设(中英文)(2017年10期)2017-11-07 07:21:13
浙江大学学报(工学版)(2016年11期)2016-06-05 09:21:03
筑路机械与施工机械化(2014年3期)2014-03-01 02:58:33
