
工件缺陷的计算机自动探伤系统研究
2015-07-07 07:06余亚玲史晋芳
制造业自动化 2015年7期
余亚玲,张 华,史晋芳
(西南科技大学 特殊环境机器人技术四川省重点实验室,绵阳 621010)
0 引言
荧光磁粉探伤是检验工件表面缺陷的一种常规无损检测方法[1]。工件经探伤机磁化后,表面缺陷处可形成漏磁场吸附磁粉,在紫外线照射下荧光磁粉产生510nm~550nm波长段的黄绿色可见荧光,即荧光效应。一般人的眼睛可以感知的电磁波的波长在380nm~780nm之间,我们称其为可见光。探伤检测员正是通过荧光效应提供的极大对比度和亮度完成缺陷检测工作。荧光磁痕检测必须在暗室进行,作业空间相对密闭、劳动强度大和重复性强等问题将导致人眼疲劳造成缺陷漏检,且紫外线辐射会对眼晶体产生一定的职业伤害。为解决以上问题,提高检测质量和效率,研究高效可靠的全自动磁痕探伤设备已成为国内外相关专家学者关注的热点[2]。
目前,基于荧光磁粉图像的自动识别方法多为基于传统图像分割算法的改进及应用。文献[3]提出了以目标信息与伪信息的灰度梯度为主要特征判据并结合阀值法提取图像裂纹。文献[4]结合了Wiener滤波器的模糊信息滤波与动态阀值法实现图像分割。文献[5]提出了基于形态学的裂纹提取与还原分割以及基于区域生长理论的单连通区域判定。文献[6]针对特定的裂纹识别,提出通过计算图像连通区域的大小和圆形度对可疑图像进行分割的方法。上述文章中均提到在实际应用中存在一定的局限性,例如:有些图像的目标和背景灰度很接近;一些工件的裂纹轮廓和纹理特征不具备统计性,随机性极强。在线检测系统要实际应用还需要较高的实时性和精确性。
本文针对工件表面裂纹的智能自主识别,利用磁痕图像荧光效应这一鲜明物理现象,通过建立计算机的物理荧光效应映射矩阵,实现产生荧光效应区域提取。通过创建推理机,建立人工判定知识库,模拟人眼判定,实现真伪裂纹的智能辨识,算法思想示意如图1所示。

图1 算法思想示意图
1 荧光效应模型推导
1.1 预备知识
1.1.1 CIE1931-RGB标准
CIE1931-RGB标准则实现了计算机对波长的数字表征。该标准是由317位正常视觉者用CIE规定的红、绿、蓝三原色光,对等能光谱色从380nm~780nm所进行的专门颜色混合匹配实验得到。图2显示了510~560波长段的光谱三刺激值分布。
1.1.2 HSV颜色空间
HSV是A. R. Smith在1978年根据颜色的直观特性创建的一种颜色空间,这个模型中颜色的参数分别是:色调H、饱和度S和亮度V。作为一个非线性的颜色表示系统,HSV顔色空间具有两个重要特点:1)该空间将色度H和亮度V分离,使得亮度信息与颜色信息无关;2)该颜色空间使人对色差的感知比较均匀,和人对颜色的感知相一致,符合人的视觉特性。所以,本文选择基于 HSV颜色空间建立模拟人眼感知荧光效应的计算机模型[7]。
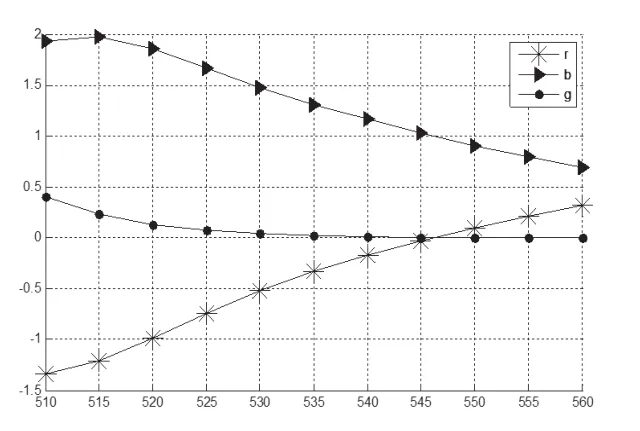
图2 510~560波长段光谱三刺激值
1.2 模型推导
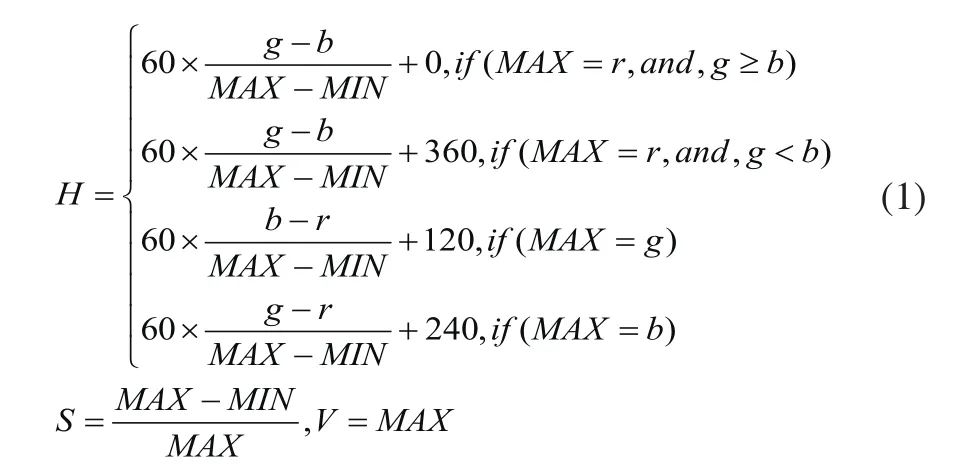
HSV在数学定义上可认为是在RGB颜色空间R, G和B参量的坐标变换,是对RGB色彩空间中点的关系表示,设 r、 g、 b分别是一个颜色的红、绿和蓝坐标,它们的值是在0到1之间的实数,设max等价于r、g和b中的最大者,设min等于这些值中的最小者,可得空间转换公式如下[8,9]:
又有,CIE1931-RGB标准的颜色混合匹配实验原理为色度学的三基色原理。三种基色是相互独立的,任何一种基色都不能由其他两种颜色合成,以红绿蓝为三基色的颜色合成应用最为广泛。如果C为待匹配的目标色R、G、B为三原色,对应目标色及三原色的量,当用三原色混合实现与颜色C的匹配有C=R(R)+G(G)+B(B)。匹配该颜色所需要三原色的数量即为颜色的三刺激值因此,将光谱三刺激值进行归一化计算后即可等价于r、g b值。归一化如式(2)所示。

将CIE1931-RGB标准中510nm~560nm波长段的归一化光谱三刺激值迭代入式(1),获得光谱三刺激值转换为HSV空间坐标系中波长与相应的H、S、V参量对应关系(如图3中的离散点)。
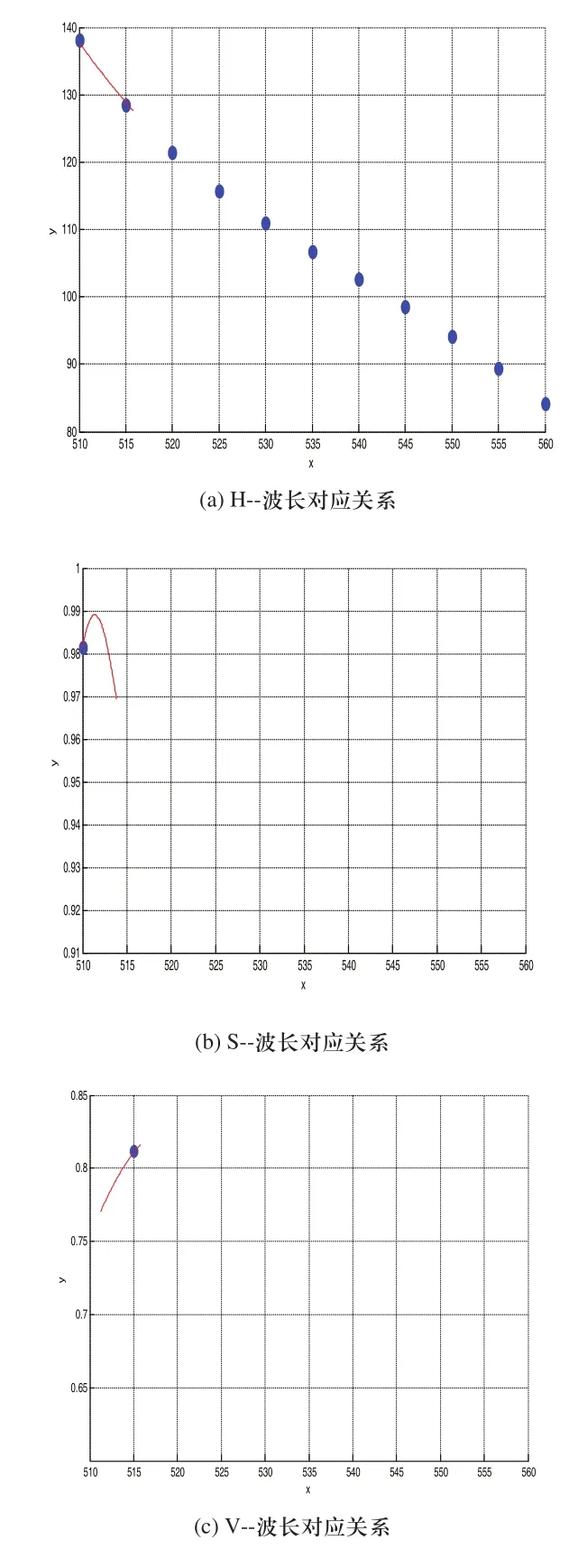
图3 HSV-荧光效应映射
根据离散点分布特点,进行多项式函数拟合(如图3中的曲线),我们用x表示波长值,结果如下:

其中:

我们称M为荧光效应矩阵,具体值如式(4)所示。即当图像的任意像素点通过M的映射计算后结果在510nm~550nm波长段内,则当前点为发生荧光效应点。
1.3 模型提取结果分析
程序实现过程中,基于图像像素点是否符合荧光效应映射矩阵成功提取得到了荧光效应区域,结果如图4,符合的像素点在图中为白色。分析提取效果图发现,白色区域包含真正的裂纹区,却不绝对包含。如何在荧光效应区域中判定出真正的裂纹区,本文在下一节进行了详细阐述。

图4 提取结果图
2 辨识模型建立
由磁粉探伤原理可知,因工件截面变化、材料性质差异等其他很多原因同样可形成较大的漏磁场吸附磁粉从而形成非缺陷磁痕(如图4所示A区域)。这些散落分布的非缺陷磁痕具有出现区域随机、形态无规律以及数量无概率性等特点。通过调研发现,专业检测人员检测过程是通过观测产生荧光效应区域的亮度、饱和度等特征以及自身的经验和规定的规则完成裂纹判别的检测工作。因此,专业人员的观测经验以及人眼观测的准确性变得不可替代。传统的图像分割、特征提取分类等方法在该应用中出现了一定的局限性[10]。
针对上述问题,本文引入了专家系统的设计思想。通过熵和信息增益率的迭代计算形成推理机,并结合人工判定经验对推理机进行训练。文中,我们把图像的每一个像素点看作训练数据集中的一个样本,一张图像便构成一个子训练集。
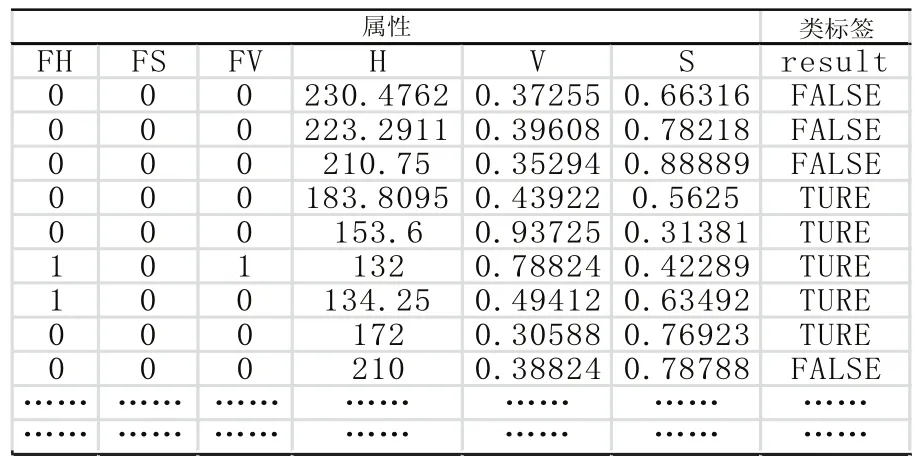
表1 训练数据集
描述属性Ak(k=1,2,…,m)有6个不同的取值{FH,FS,FV,H,V,S}。Tj(j=1,2,…,6)中的样本在属性Ak上具有相同的取值ajk。|Tj|为子集Tj中的样本数,|Ci
j|为子集Tj中属于类别Ci的样本数。其中满足荧光效应矩阵点标记为1,否则标记为0。H、S和V表示每一像素点在HSV空间的各参量。类标签分为两类:真和假。生成数据集如表1所示。
属性Ak的信息熵为:

信息增益率的计算:

本系统采用了30张磁痕图像作为训练集。第1张图像是由人工直接标定像素点是否为裂纹点的真假(即标签值),生成正样本。从第2张图像开始便开始推理机的训练。首先,由推理机得到图像判定的结果图。然后,通过人工标定结果图中的错误判定从而生成负样本,统计推理机每条规则分支的错误率(如图5所示),用P表示。正样本和负样本构成推理机的专家知识库。得到专家知识库以后,依次将规则分枝中信息增益率*(1-P)最大的子节点进行递归,直到叶节点中所有样本属性取值相同为止。实验生成的推理机形象表示如图5所示。
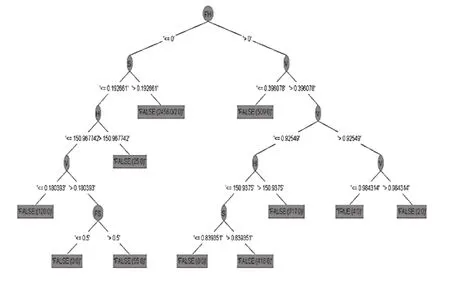
图5 推理机形象表示
3 实验总结与验证
3.1 实时性分析
为了验证算法的实时性,利用在MATLAB实验平台将三种常规分辨率下的共60张磁痕图片进行实验处理,统计获得算法平均耗时数据分析表(如表2所示)。其中,实验计算机的CPU频率为2.13GHz,算法耗时的单位为毫秒(ms)。

表2 算法耗时数据分析表
通过资料查询得知制造业输送带运行速度一般不宜大于2.5m/s,并且块度大和磨损性大的物料和使用固定的卸料装置应尽量采用更低速。假定工件被运送的速度取为0.0025m/ms,选取最高分辩率的图像的最大处理时间16.237ms(如表2所示)。通过计算可知,执行图像处理的耗时过程工件被传送了0.0405m。因此,只要在生产线上两工件的摆放距离大于0.0405m,当前工件图像判定并不会滞后下一工件图像的判定识别。而工业制造中,工件在传送带的摆放距离显然是大于0.0405m的。
另外,相机主流帧率制式有60fps、30fps和25fps。假定应用该在线检测系统的生产线选取60帧/秒制式相机以无间断的视频流的方式拍摄工件图片,则摄像机捕捉每一帧图像的时间间隔为16.67ms。由表2可知,最高分辩率图像最长耗时为16.237ms,平均时间为15.597ms。因此,在摄像机捕捉下一帧图片信息时,当前图片已经处理完毕,算法实现了图像的即时捕捉和即时处理。
3.2 鲁棒性分析
针对算法的鲁棒性验证,实验进行了不同种类的工件出现的图像信息捕捉形成黄绿色反光现象(如图6(a))、工件裂纹不规则且有伪荧光效应点(如图6(b))现象和黄绿色干扰背景下的算法验证。通过实验结果图(如图6(c))可知,本文提出的算法具有一定的通用性和很好的移植性,能适用于多种类较复杂环境下的工件探伤。

图6 实验结果
4 结束语
本文通过推导物理荧光效应的计算机表达矩阵,实现人眼对黄绿光的感知模拟,算法设计兼顾了检测的精确性和实时性。推理机的创建和训练对图像信息中出现的反光、伪荧光效应点和背景环境等问题具备了良好的鲁棒性,系统应用具备了一定的可移植性。因此,本文提出的算法设计具有较为深远的实际应用价值。同时,算法还具有很多需要改进和继续完善的地方。训练集的丰富和对推理机的再训练以提高检测的精确性是该算法还需继续完善的部分;对提取的裂纹所属种类的判定是该算法可以继续深入的课题。
[1] 李星优,颜琼全勇,谢俊,等.关于磁粉检测分析[J].科技资讯,2014 (08):96.
[2] 黄涛.全自动荧光磁粉探伤中目标识别图像处理技术研究[D]. 江苏省:南京理工大学,2012:1-53.
[3] 康健,杜向党,白龙.火车轮对荧光磁粉探伤图像的裂纹识别技术研究[J].机械与电子,2013(12):44-46.
[4] 陆宝春,李建文,王婧,等.基于特征差异性的荧光磁粉探伤图像分割算法[J].南京理工大学学报.2011,35(06):797-800.
[5] 陆宝春,李建文,陈吉朋,等.荧光磁粉探伤自动缺陷识别方法研究[J].南京理工大学学报(自然科学版),2010,34(06):803-808.
[6] 张家栋,张强,霍凯.图像处理在轴承荧光磁粉探伤中的应用研究[J].计算机技术与发展.2009,19(08):216-219.
[7] Ganesan, P.,Rajini,V.Assessment of satellite image segmentation in RGB and HSV color space using image quality measures[J]. International Conference on Advances in Electrical Engineering .2014:1-5.
[8] Lih-Jen Kau, Tien-Lin Lee. An HSV Model-Based Approach for the Sharpening of Color Images[J].Systems, Man, and Cybernetics (SMC),2013IEEE International Conference on. 2013:150-155.
[9] Lopez del Alamo, C.J., Fuentes Perez, L.J., Romero Calla, L.A., et.. A novel approach for image feature extraction using HSV model color and niters wavelets[J]. Computing Conference (CLEI). 2013:1-7.
[10] 郑何程,冯建,卢继平.表面裂纹荧光磁粉检测分析[J].科技传播. 2013(12):155-156.
[11] Xiao-qiang Zhao,Jia-min Yang. An improved TANC classification algorithm based on C4.5[J].Control and Decision Conference.2014: 4992-4996.
[12] Hui Zhu, Siyu Chen, Lexiang Zhu, eg.RangeTree:A Feature Selection Algorithm for C4.5 Decision Tree[J].Intelligent Networking and Collaborative Systems.2013:17-22.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
材料工程(2022年2期)2022-02-26
成都信息工程大学学报(2021年4期)2021-11-22
课程教育研究(2021年23期)2021-04-13
装备制造技术(2020年11期)2021-01-26
World Journal of Diabetes(2019年7期)2019-07-23
制造技术与机床(2019年7期)2019-07-22
扬子江(2019年1期)2019-03-08
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年10期)2017-11-28
