基于数字图像分析的铁路货车闸瓦插销窜出故障自动识别方法
2015-07-05 12:07:24何应德
铁路计算机应用 2015年12期
张 益,何应德,吴 迪
(北京康拓红外技术股份有限公司,北京 100095)
基于数字图像分析的铁路货车闸瓦插销窜出故障自动识别方法
张 益,何应德,吴 迪
(北京康拓红外技术股份有限公司,北京 100095)
本文基于数字图像分析技术,提出一种TFDS铁路货车闸瓦插销窜出故障的自动识别方法。算法对原始输入图像进行必要的区域定位、直方图均衡化、去噪等预处理;针对处理后的闸瓦插销的图像,设计适合其形状、纹理和位置3个方面特征的梯度方向直方图来描述闸瓦插销的特征向量;提取特征向量输入到已经训练好的线性可分支持向量机分类器模型中进行故障判断和自动识别。实验数据证明了该识别算法的稳定性、可靠性和实用性。
TFDS;闸瓦插销;图像分析;梯度向量直方图
铁路货车运行故障动态图像检测系统(TFDS)作为车辆运行安全监控系统(5T系统)的重要组成部分,通过布置于轨侧、轨下的高速工业相机阵列对运行中的货车车体进行图像采集,再由列检人员根据传输到列检中心的货车图像进行故障识别和判断,充分利用计算机机器视觉技术,实现列检从完全的室外作业到室内作业的有机转变。随着货运列车(货车)开行密度和运量的不断增加,货车列检故障识别的必然趋势是由列检人员高强度、满负荷的人工判断逐步转为计算机自动识别。数字图像分析的引入将提高故障自动识别的效率和可靠性,对保障铁路安全运输、提升货车运行效率具有重要意义。
闸瓦插销是把货车闸片固定在闸瓦托上的重要配件。闸瓦插销窜出是列车较易发生的故障之一,它的窜出可能导致闸瓦丢失,影响车辆制动,给列车行车安全带来严重隐患。因此,对闸瓦插销状态的检查是列车安全行驶的重要保障。图1为TFDS轨边相机拍摄的闸瓦插销图像。图1(a)为正常情况下的图像,闸瓦插销从闸瓦托的插槽里伸出;图1(b)为闸瓦插销窜出故障图像,闸瓦插销向上窜出(图的深度方向),在闸瓦托的插槽里已经看不见插销。
1 预处理闸瓦插销图像
由于轨边高速相机处于室外,受雨雪天气和强弱光等环境的影响,以及像机与通过的列车共振产生的抖动,导致采集的货车动态图像的亮度和对比度差异大,存在曝光不足或过度、局部反射光斑、模糊和对比度低等问题。从图1可知,闸瓦插销部件在整幅图像中仅占较小的部分,为减少整体算法的运算量,仅需处理包含该部件的一个矩形区域即可,称之为闸瓦插销感兴趣区域。
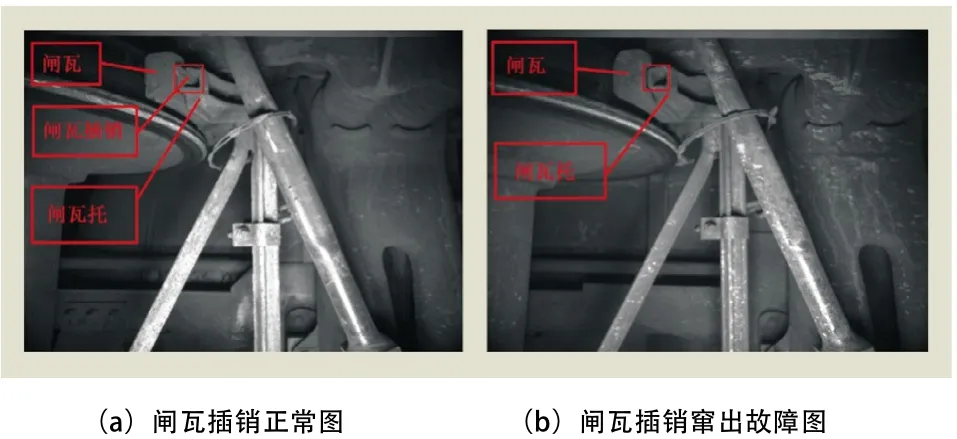
图1 TFDS拍摄的闸瓦插销图像
针对闸瓦插销图像的上述特点,在预处理过程中,预处理算法通过判断闸瓦及闸瓦托的边缘空间位置的先验关系来确定闸瓦插销的感兴趣区域,对感兴趣区采用灰度直方图均衡化和高斯平滑方法进行预处理。图2(b)是直方图均衡化后的效果图,可以看到经过直方图均衡化后图像的灰度分布更加均衡,减小图像灰度分布差异对特征向量提取的影响。但直方图均衡化对图像增强的同时,噪声也被放大,因此在预处理过程中对直方图均衡化后的图像采用了高斯平滑对图像进行去噪。图2(c)为高斯平滑后的插销图像。
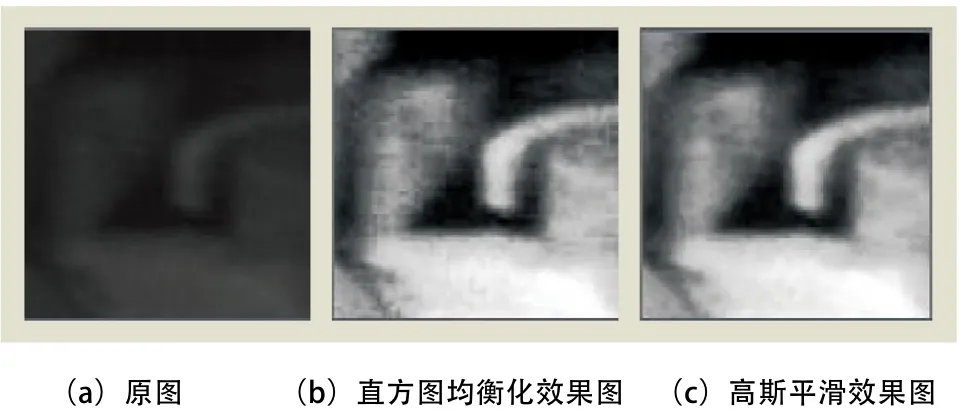
图2 直方图均衡化、高斯平滑前后效果图
2 闸瓦插销窜出故障自动识别
由于图像中插销方向的无序性和不规则性,需要先提取故障区域图片的特征,再进行分析和判断。本文采用梯度方向直方图(HOG) 进行特征提取。图像特征提取完毕之后,利用支持向量机分类器(SVM)对特征图像进行分类决策。识别过程具体如下:
(1)镜像图像。插销出口的位置统一朝“左上”方向。这样做可以简化插销出口的定位和插销窜出(或丢失)的识别。
(2)获取HOG特征向量,并进行归一化。对绝大部分的车型而言,归一化过程不仅包含了足够的插销图像信息,同时不会引入过多干扰识别的噪声信息,还能够避免光照不一致性的影响。
(3)决策识别。将插销出口的HOG特征输入训练好的SVM,SVM给出识别结果。“-1”表示插销丢失,“+1”表示图像正常。具体如图3所示。

图3 闸瓦插销窜出识别算法流程图
2.1 闸瓦插销窜出特征向量
2.1.1梯度方向直方图
梯度方向直方图是2005年由Navneet Dalal提出的[1~2],用来作为物体检测的特征。梯度方向直方图是图像局部区域特征的累加,而非单纯的针对一整幅图像。HOG的局部提取范围称作窗,需要判断的就是这个窗区域中是否包含特征物体。在提取的窗中,进一步将窗分割成块和细胞。单个梯度方向的直方图提取的最基本区域是细胞。
提取过程可分为5步:(1)将待提取区域归一化成统一大小,本文采用插销区域的像素大小。(2)计算窗区域中的梯度值,分为梯度模值和梯度方向两张图。(3)将窗口分割为若干个相互之间有重叠的矩形块,每一个块分割成几个固定数目的细胞单元。在每一个细胞单元中计算细胞本身的该梯度方向的直方图。(4)将一个矩形块中包含的各子细胞单元直方图相连得到该块的直方图向量,同时进行归一化。(5)将窗口中各块的直方图向量相连接,得到该插销区域图像完整的HOG特征向量,如图4所示。
2.1.2梯度计算
梯度可以有效地表现轮廓、边缘和一些纹理特征,同时受光照变化的影响较小。对于每个像素点梯度的计算,本文采用一维的中心对称算子[1,0,1]对插销图像提取梯度方向直方图特征向量。

图4 梯度方向直方图特征提取流程
2.1.3单元格内直方图投票
单元格内直方图投票是为了获取图像局部梯度的信息编码,尽可能地减少插销位移或外形的微小变化带来的影响。块中的每一个细胞在指定区间量的梯度方向投票得到其对应的一个直方图,幅值作为直方图计算的投票值。单个像素在直方图的区间位置由该像素的梯度方向决定,角度范围可以分为无符号0~180度,或有符号的0~360度。若细胞的直方图维度过高,会增加直方图向量的长度,增大计算量;并会使特征变得过分敏感,在插销和插销托形变的鲁棒性方面不理想;而直方图维度太低,则造成特征表达稍显粗糙,不能有效描述细胞内部的物体边缘分布情况。Navneet Dalal 和 Bill Triggs在其论文中给出了证明,通常使用的直方图是九维的,即每20度统一到一个维度[2]。
2.1.4块直方图归一化
每一个块内的所有细胞在投票结束后,将相邻的直方图按照固定的位置次序连接,并进行向量归一化处理,得到块的直方图向量。对块的直方图向量做整体上的归一化处理的目的是消除不同图片上梯度模值的差异,减少边缘的锐利程度,加强局部区域边缘方向的分布情况。
本文采用L2-norm的归一化方法,设V是未归一化的直方图向量,(||V||K, K=1, 2)是V的K范数,ε 是一个常数,用于校正,则L2-norm如式(1)所示。

经过归一化后,将窗口中的各块向量连接成完整的HOG特征,完成描述插销图像的HOG特征向量的提取。
2.2 支持向量机分类器
根据HOG的特点,本文选择线性可分支持向量机分类器进行机器学习和分类[3]。
支持向量机实现的关键是寻找最优分类超平面。图5所示为二维空间中的两类线性可分的样本,方形和圆形分别代表两种样本。假设分类线为H, H1和H2分别为各类样本中距离H最近且平行的直线,称H1和H2之间的距离叫做分类间隔。最优分类线就是要求分类线不但能够将两类样本正确分开,而且使得分类间隔最大。

图5 最佳分割超平面
设最优超平面的方程为wTx+b=0。根据点到平面的距离公式可知,样本X与最佳超平面(w, b)之间的距离为对其进行归一化,选择w和 b,使得距离超平面最近的样本xk满足
图5中,H1和H2上黑色的样本点称为支持向量,是各类样本中距离H最近的样本。最优分类函数为:
2.3 分类器训练
分类器训练是为了构造分类模型,训练流程如图6所示,训练过程分为4步。
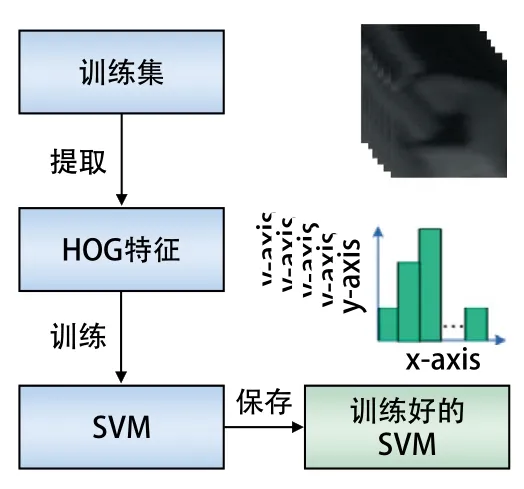
图6 分类器训练流程图
(1)准备训练样本。收集朝向一致向“左上”方的插销出口图像,正负样本各400张。图7为部分正负样本示意图。(2)提取HOG特征。提取所有样本的HOG特征,并对特征向量归一化。样本的特征向量组合成一个特征矩阵,矩阵的每一行对应一个样本特征向量。另有一个结果指示矩阵,行数与特征矩阵相同,只有一列,其每一行指示了对应特征矩阵样本的正负。(3)训练SVM。采用高斯核函数,核函数参数gamma以及软边界代价因子C通过扫描方法确定最佳取值。(4)保存训练结果。

图7 正负样本示意图
3 实验结果及分析
本算法的测试环境为:Windows 7(32 bit)操作系统,英特尔酷睿2双核处理器,4 GB内存,VS2010的开发环境。为检验识别算法的可靠性、稳定性和鲁棒性,分别采集4类环境下(光照充足、曝光不足、雨天模糊、型号特殊)的插销图像数据共计4 000个样本进行测试,同时与较为常用的模板匹配的算法进行比较,实验结果如表1和表2所示。

表1 不同环境采集图像实验测试结果

表2 两类识别算法实验测试结果
从表1和表2可知本文算法分别在4类环境图像的识别中表现了较高的识别率,平均达到98.25%,运行时间平均每个样本16 ms左右。比模板匹配的方法识别率提高了6.95%,运行时间缩短了1/3,这是因为插销的伸出方向不确定,在第1到第3象限的270。范围内都有可能,还可能存在扭曲和弯曲的现象。这给模板的准备造成了很大的困难,同时也会大大降低模板匹配方法的识别效率。提取图像梯度特征的直方图,很大程度上削弱了插销位置的影响,因而具有更好的识别效果和鲁棒性。
4 结束语
本文结合数字图像分析理论,提出一种基于数字图像分析的铁路货车闸瓦插销窜出故障自动识别方法。实验结果表明,该方法使用的向量特征能很好的识别出插销窜出的故障图像,不受目标位置偏移、形变的影响,抗噪性能较强,对分辨率低,曝光不足和模糊等质量较差的图像具有很强的适应性,同时算法运算速度较快,效率较高。
[1] Navneet Dalal, Bill Triggs. Histograms of Oriented Gradients for Human Detection[J]. Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, vol.2, 2005:886-893.
[2] Navneet Dalal. Finding People in Images and Videos[D]. Grenoble, France: The French National Institute for Research in Computer Science and Control, 2006: 10-25.
[3] Corinna Cortes , V.Vapnik. Support-Vector Networks[J]. Machine Learning, 20, 1995:273-297.
责任编辑 陈 蓉
Automatic recognizing for brake shoe key fault of railway freight cars based on image analysis
ZHANG Yi, HE Yingde, WU Di
( Beijing Ctrowell Technology Co.Ltd., Beijing 100095, China )
This article presented an automatic recognition method to identify the fault of railway truck brake shoe key, based on the technology of digital image analysis of Trouble of moving Freight car Detection System(TFDS). Regional localization for the original image, histogram equalization and image de-noising were taken in image pretreatment. Through the histograms of oriented gradients to extract the feature vector of the brake shoe bolt, the extract features vector was imputed to the trained classif i er linearly separable support vector machine (SVM) model for fault diagnosis and automatic recognition. Experimental results demonstrated that the proposed algorithms of automatic fault recognizing for brake shoe key were available, stability and reliability.
Trouble of moving Freight car Detection System(TFDS); brake shoe key; image analysis; histograms of oriented gradients
U294.2∶TP39
A
1005-8451(2015)10-0039-04
2015-04-15
张 益,高级工程师;何应德,工程师。
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02 09:46:54
保定学院学报(2022年2期)2022-04-07 02:26:50
铁道车辆(2021年5期)2021-11-09 04:31:04
城市轨道交通研究(2021年7期)2021-07-21 03:08:16
铁道建筑(2021年11期)2021-03-14 10:01:48
科技风(2019年13期)2019-06-11 15:48:29
现代电子技术(2018年12期)2018-06-12 06:41:20
许昌学院学报(2018年4期)2018-05-02 12:27:37
大连交通大学学报(2018年1期)2018-03-21 01:05:05
中华建设(2017年1期)2017-06-07 02:56:14