
现代有轨电车三相交流转辙机控制模块
2015-07-05 12:02陶玉凤
铁路计算机应用 2015年4期
彭 毅,张 锐,陶玉凤,何 涛
(兰州交通大学 光电技术与智能控制教育部重点实验室,兰州 730070)
现代有轨电车三相交流转辙机控制模块
彭 毅,张 锐,陶玉凤,何 涛
(兰州交通大学 光电技术与智能控制教育部重点实验室,兰州 730070)
根据现代有轨电车的运营特点,借鉴铁路运输的关键技术,研究了现代有轨电车信号系统的主要结构,设计了一套适合我国城市轨道交通发展的现代有轨电车道岔控制模块。重点分析了模块的可靠性和安全性。通过实地测试证明,该模块具有体积小、功能完整、性能稳定等特点,有较强的工程实用价值。
交通工程;道岔控制模块;信号系统;现代有轨电车;可靠性;安全性
随着国内城市化进程的加快,现代有轨电车以其投资小、绿色环保和高效等优点,已成为未来城市交通发展的重要趋势[1]。现代有轨电车信号系统经过现代化技术的改造之后,具有良好的封闭性、灵活性和适应性,客运能力和速度得到大幅度提高[2]。现代有轨电车道岔控制子系统作为有轨电车从一股轨道转入或越过另一股轨道的线路设备,是现代有轨电车信号系统的重要组成部分[2]。如何设计道岔控制子系统以满足现代有轨电车安全运营的需要,已成为目前一个亟待研究的问题。
根据文献[3]可知,随着微电子技术、计算机技术和信息技术的发展以及可靠性和容错技术的提高,使用全电子执行单元来实现计算机联锁执行层中安全型继电器的功能,已成为我国铁路信号系统的发展趋势。同时,近年来随着人们对铁路运输能力要求的不断提高,三相交流转辙设备以其动力充足、动作可靠、电机故障率低、维修工作量小等优点,在轨道交通工程应用中已被大量采用[3]~[4]。故在现代有轨电车的道岔控制子系统中选择使用三相交流转辙机作为动力,更符合实际应用的需求。通过分析现代有轨电车的运营特点和信号系统的关键技术,论述了用五线制道岔全电子驱动采集一体化模块,实现对现代有轨电车三相交流转辙机控制的方法与原理,并重点分析了基于全电子技术模块的可靠性和安全性。
1 模块整体结构
现代有轨电车由无线通信子系统、运行调度子系统、电子导航子系统、车辆段子系统、正线道岔控制子系统、路口信号优先控制子系统和乘客信息服务子系统组成[1]。正线道岔控制子系统的核心是道岔控制模块,通过该模块控制道岔的定反位转换,实现有轨电车的转线或折返作业。
传统6502电气集中执行层电路由于体积大、动作过程缓慢、故障点多而且需要定期检修等缺点,已经无法满足轨道交通控制系统的需求。全电子道岔模块采用微处理器技术、自动控制技术和电子开关技术,替代了传统6502电气集中以安全型继电器作为控制单元的电路形式,与联锁计算机相结合,完成了计算机联锁系统的末级控制和采集功能。该模块采用监测、控制一体化的方式,具有采集道岔位置状态、动作电流等模拟量的功能,实现了微机监测系统对现场信号的采集、调理与处理功能;模块具有电源检测、过流过载保护、负载短路自动保护、故障诊断等多项综合功能;模块采用无触点式控制技术,延长设备使用寿命,取消了电路熔丝,故障排除后自动恢复,不需要人工干预;模块还具有配线简单,维护方便,运营成本较低等特点。
1.1 硬件设计
针对五线制三相交流电动转辙机的执行单元,主要用于控制道岔的转换和采集道岔的状态信息,设计符合计算机联锁的技术要求。模块整体按照闭环控制和控制电路双断的安全技术进行设计,采用完全独立的“二取二”冗余结构来确保安全。同时应用避错和容错技术以及独立于微处理器的快速硬件反馈保护等一系列的技术手段来实现“故障-安全”,模块主要能够实现以下功能:
(1)控制三相交流电动转辙机进行定反位操作,道岔转换到位后自动切断驱动电路;
(2)在没动作的过程中随时采集道岔状态信息,并进行道岔状态的显示和上传;
(3)能够检测自身软硬件故障、室外二极管短接或反接、转辙机线间混线以及混电等故障;
(4)能够自动检测三相动作电源是否正常,道岔区段是否处于锁闭状态,并将信息进行显示和上传。
模块由逻辑微处理器、检测电路、动作驱动电路、通信电路、电源电路、道岔区段锁闭采集电路和地址码/配置类型采集电路等组成,其硬件电路结构示意图如图1所示。
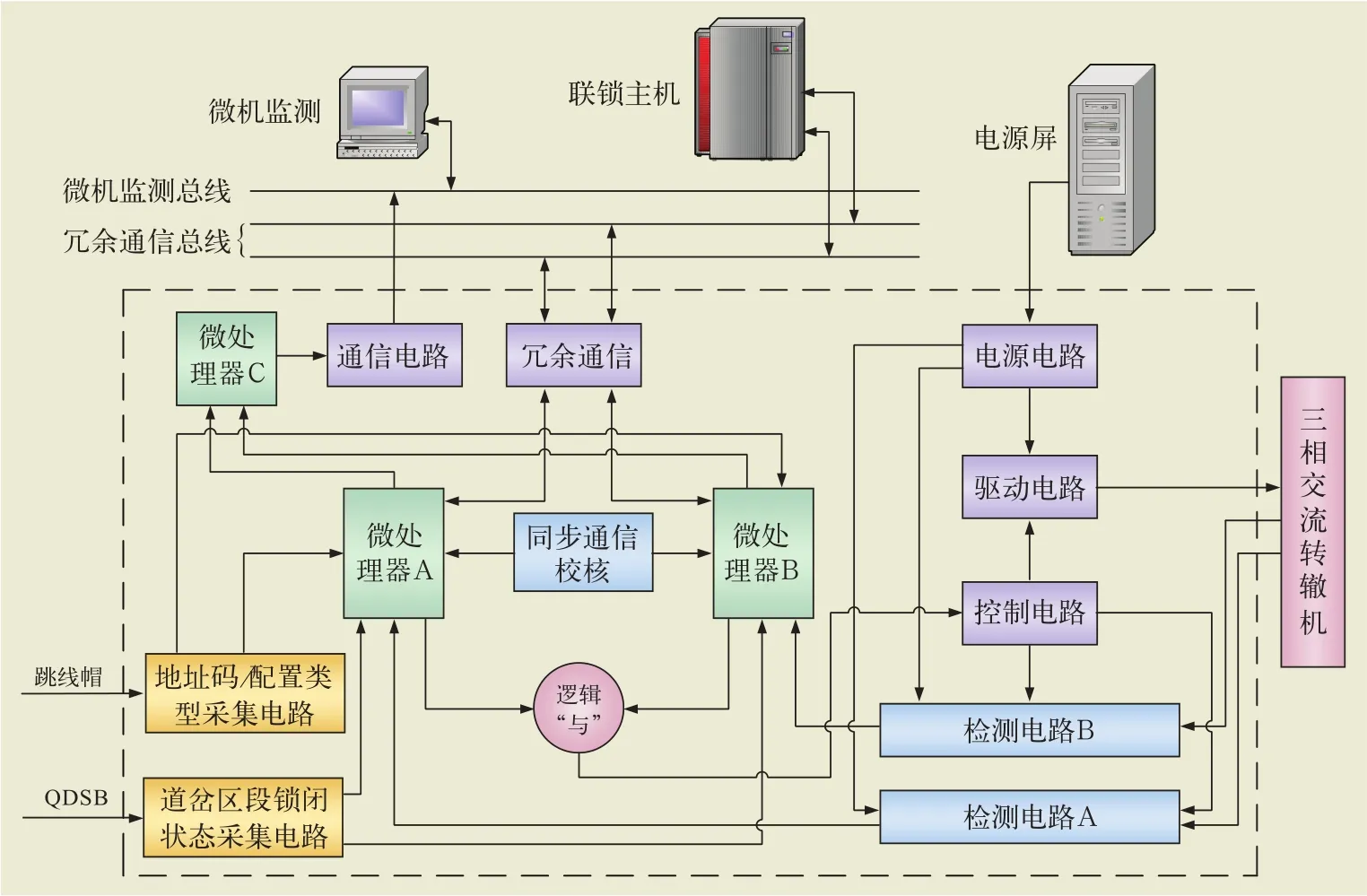
图1 模块硬件结构示意图
1.2 电路实现功能
1.2.1 逻辑微处理器
为完全硬件级二取二冗余结构,以单个处理器为核心构成独立的闭环控制结构。在逻辑控制中采用二取二逻辑“与”的方式判断道岔位置状态,处理定反位操作命令及控制输出。微处理器接口信号均经过光电隔离,且关键器件的驱动输出采用动态驱动方式。
1.2.2 检测电路
电路由霍尔互感器、运算放大电路构成,实现采集道岔位置状态和动作状态的电流反馈信息的功能。此功能为安全功能,电路采用二取二模式进行相互校核。
1.2.3 驱动电路
电路通过开关电路和微处理器相互配合完成三相电源的正常输出,从而驱动转辙机进行定反位操作。此功能为安全功能,电路采用二取二模式进行相互校核。
1.2.4 电源电路
电路提供电路板的工作电源和道岔表示回路和动作回路的电源,同时实现三相电源完整性(断相、相序)的检测功能。
1.2.5 地址码/配置类型采集电路
电路实现读取模块地址和配置类型信息的功能。此功能为安全功能,电路采用二取二模式进行相互校核。
1.2.6 道岔区段锁闭状态采集电路
电路与道岔区段锁闭继电器连接,实现采集道岔区段是否锁闭的功能。此功能为安全功能,电路采用二取二模式进行相互校核。
1.3 工作原理
通过霍尔互感器采集表示回路和动作回路中的电流,利用数学运算和逻辑判断,实现实时监测道岔的工作状态(表示状态和动作状态)的功能。模块采用的是非接触式互感器,与被监测设备没有任何电气连接,采集设备发生断路和短路故障均不会对被监测设备产生不良的影响。
互感型霍尔传感器工作原理如图2所示,其技术比较成熟,不影响既有的定性电路,测试精度可达0.1%,可测量任意波形的电流,如直流、交流和脉冲波形等,副边电路可以真实地反映原边电流的波形[5]。
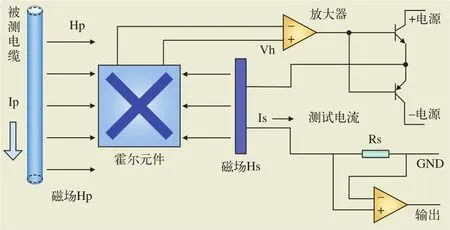
图2 霍尔元件工作原理示意图
2 模块软件设计
模块软件的主要功能是完成信息的编码、发送、接收、校验,并控制硬件完成表示信息的采集校验和控制信号的输出[3]。除了硬件严格按照“二取二”安全设计以外,微处理器的软件设计也严格按照“二取二”结构进行安全设计,符合安全标准的要求。现代有轨电车的正线道岔区段的转辙机驱动采用电动控制方式。为了保证有轨电车在道岔区段安全运行,信号系统配置联锁“道岔区段占用检查设备”检测道岔区段是否被车占用,从而确保了道岔的安全转换。道岔所在进路处于解锁状态且道岔区域无车占用时才能进行道岔转换[6]。
以模块进行定位操作输出的软件设计为例,如图3所示。模块在接收到动作命令,进行驱动电路输出之前,需要进行一系列的安全检测,例如:三相电源完整性检测,驱动电路状态检测以及道岔区段锁闭状态检测等。因为三相驱动电源如果缺相会导致烧坏电机的严重后果,直接影响到运输安全和效率。
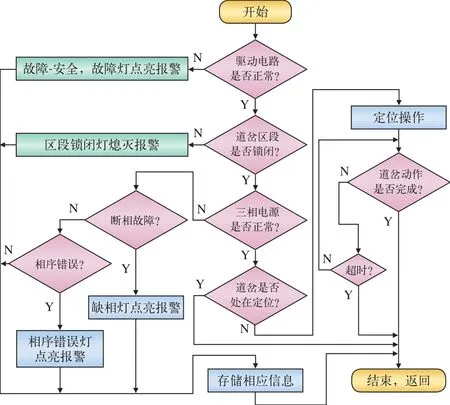
图3 定位操作流程图
3 模块可靠性和安全性分析
道岔控制模块作为保证行车安全的重要基础设备,其可靠性与安全性的高低直接影响运输效率和行车安全。安全性是指系统或设备在工作时发生故障不会产生危及行车安全的能力[6]~[7]。可靠性是指设备或系统在规定条件下、规定时间内完成规定功能的能力[6]~[7]。然而,设备的可靠性和安全性又和各元器件的工作失效率直接相关。所以,在对本模块进行可靠性和安全性分析之前,需要对各个元器件的失效率进行计算,然后逐级向上对整个模块的失效率进行计算。根据GJB/Z 299C-2006《电子设备可靠性预计手册》,元器件的工作失效率与元器件的基本失效率、工作环境温度、电应力比、设备的工作环境类别、元器件的质量等级等因素有关[8]~[9]。以微处理器为例,其失效率计算方法如下。

图4 模块的可靠性等效框图
微处理器选用AT90CAN128,属于进口单片集成电路,则参考手册附录A,其工作失效率预计模型如式(1)所示:

式(1)中:
3.1 可靠性分析
道岔全电子控制模块由微处理器、光电隔离元件、安全继电器、电源开关、霍尔互感器等元器件组成。模块逻辑微处理器采用二取二“与”的逻辑比较控制输出。模块的道岔区段锁闭状态采集电路和地址码/配置类型采集电路均采用二取二模式进行设计。基本电路包括复位电路、基准电路以及晶振电路。根据模块的设计原理,可以得到模块的可靠性等效框图,如图4所示。
运用比较成熟的马尔可夫模型(Markov Model)方法对模块可靠性进行分析[9]~[10]。通过分析计算得到a模块的故障率为,可靠度为:由于a模块和b模块采用“二取二”结构,故其平均故障间隔时间为可靠度为模块的故障率为可靠度为:d模块的故障率为可靠度为故道岔模块的可靠性指标为:

3.2 安全性分析
根据参考文献[3],再结合现代有轨电车的正线道岔控制特点,对于五线制道岔控制模块最担心的是在道岔区段未锁闭的条件下转辙机错误动作。采用故障树分析法(FTA)[11]~[12]对模块的安全性进行分析,可建立如图5所示的故障树。
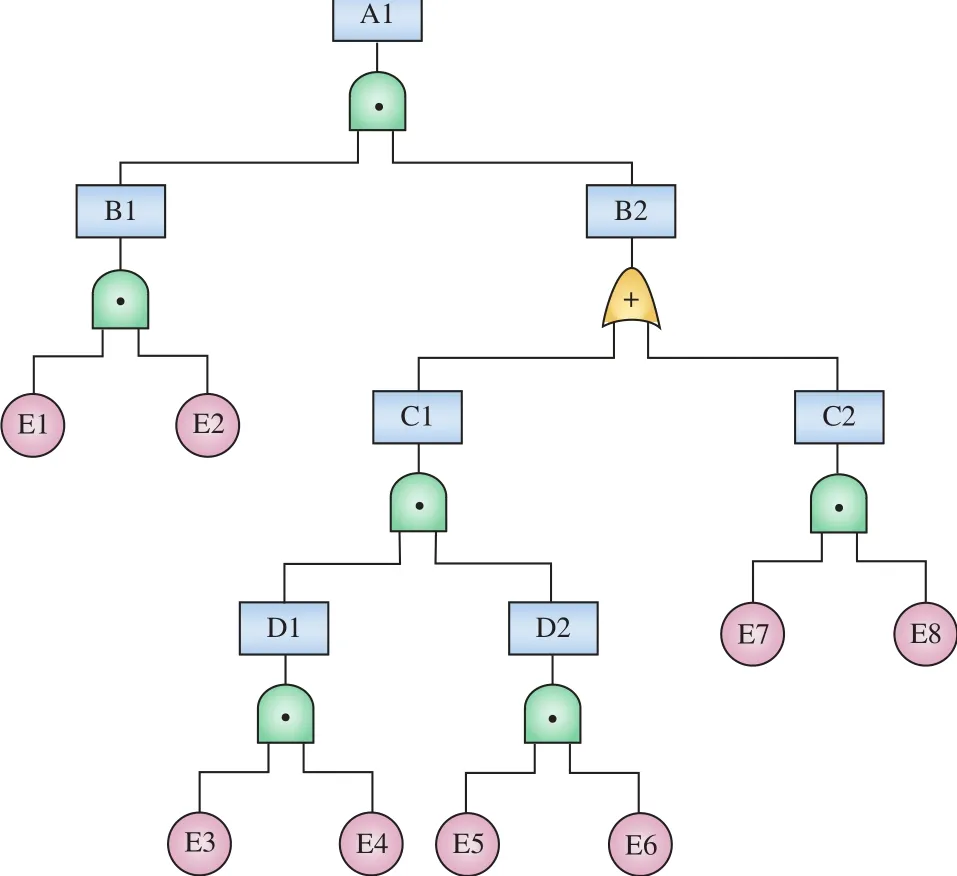
图5 转辙机错误动作的故障树分析
图5中的基本事件发生概率如表1所示。通过计算可知,模块满足轨道交通信号系统对高安全性的要求,在道岔区段未锁闭条件下转辙机错误动作的基本事件发生概率为:

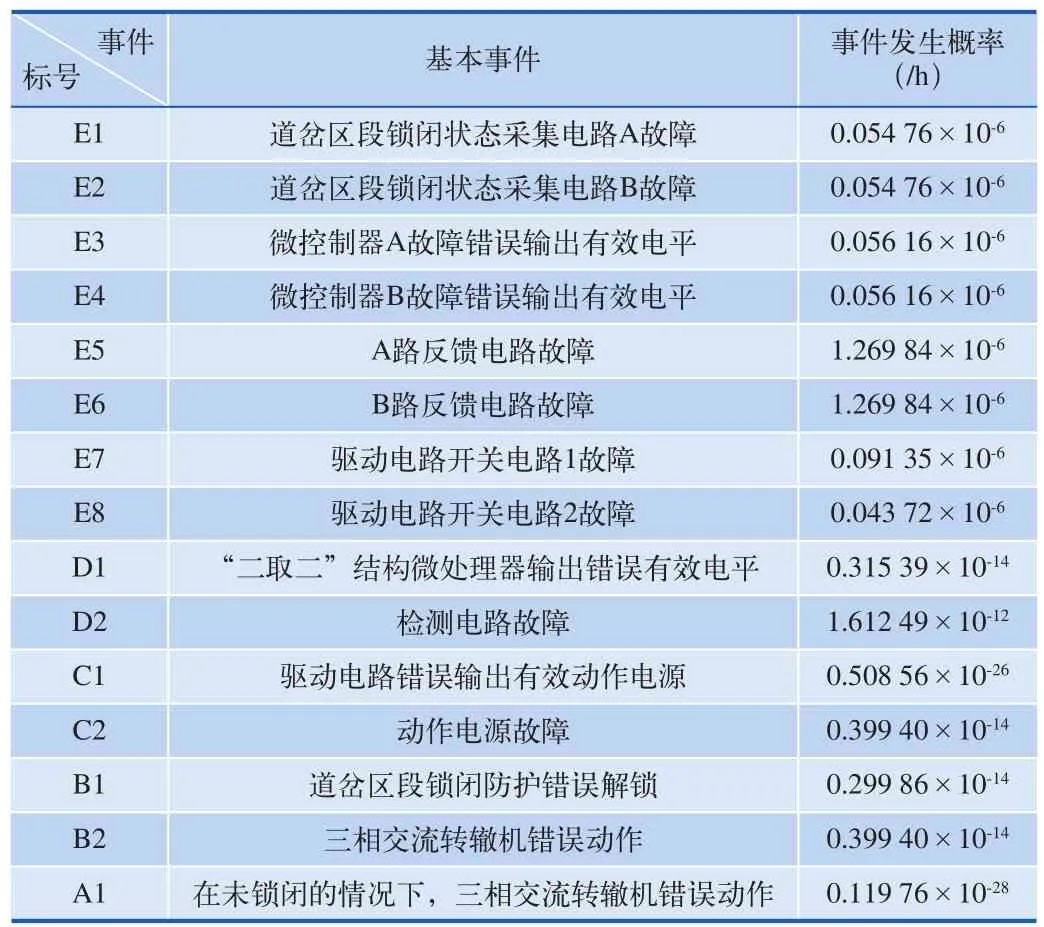
表1 转辙机错误动作的基本事件发生概率
4 结束语
现代有轨电车信号系统采用全电子驱动采集一体化执行模块,可明显减少设备占地面积,减轻维护工作人员的工作量,大幅缩短故障排除时间。道岔控制模块可以很好地实现ZDJ6-CG型转辙机(专门应用于现代有轨电车的三相交流转辙机)的控制功能,能较好地满足现代有轨电车正线道岔转换的需求。该模块已在现代有轨电车示范线上进行了实地测试。测试证明,该模块功能完整,性能稳定,运行效果良好,具有较强的实用价值,适合推广。
[1]秦国栋,苗彦英,张素燕.有轨电车的发展历程与思考[J].城市交通,2013(7):6-12.
[2]马晓川,王 平.有轨电车6号道岔尖轨跟端形式对尖轨转换的影响分析[J].铁道标准设计,2014,58(7):38-41.
[3]何 涛,范多旺,魏宗寿.计算机联锁全电子三相交流转辙机控制模块[J].铁道学报,2011,33(4):80-83.
[4]张立杰.地铁信号系统转辙机的选型及分析[J].自动化应用,2013(6):44-45.
[5]汤振鹤,李洪儒,张 军.基于霍尔原理的特种电源用电流检测组件的设计[J].仪表技术与传感器,2013(12): 116-119.
[6]王国军,贾利生,韩 晓.有轨电车道岔控制方案及安装方式研究[J].铁道标准设计,2014,58(1):57-60.
[7] Debiao Lu,Federico Grasso Toro,Eckehard Schnieder.RAMS Evaluation of GNSS for Railway Localisation[C]. Intelligent Rail Transportation(ICIRT), Beijing:IEEE International Conference on, 2013.
[8] Xu Wei,Huang Cuiying.Control system of maglev train based on RAMS[C]. Electrical and Control Engineering (ICECE), Yichang: IEEE International Conference on, 2011: 2943-2946.
[9]骆明珠,陈 颖,康 锐.基于PoF模型的电子产品可靠性参数计算方法[J].系统工程与电子技术,2014,36(4):795-800.
[10]喻智宏,孙吉良,申大川.有轨电车通信信号技术与智能交通系统[J].城市交通,2013,11(7):44-51.
[11] Ping WANG,Rong CHEN.Control Circuit Analysis and Conversion Calculation of Electric Switch Machine of High Speed Railway Turnout[J].Przeglad Elektrotechniczny,2011,88(1):52-56.
[12] Dai Shenghua,Li Yishi.Research on 2-out-of-2 multiplying 2 redundancy system used in high-speed train[C]. Computer Science and Automation Engineering (CSAE), Shanghai:IEEE International Conference on, 2011:483-486.
责任编辑 方 圆
Control module of three-phase AC switches for modern tram car
PENG Yi, ZHANG Rui, TAO Yufeng, HE Tao
( Key Laboratory of Opto-Technology and Intelligent Control Ministry of Education, Lanzhou Jiaotong University, Lanzhou 730070, China )
Combined with the characteristics and key technologies of railway transit, the paper studied on the main structure of Signal System for modern tram car at home and abroad, designed a suit of switch control module of modern tram car which was suitable for our country, analyzed the reliability and security of the module. Through fi eld tests, it was fully proved that the module was with advantage characteristics of small volume, fully functional, and stable performance etc, and with strong promotional practical value.
traff i c engineering; switch control module; Signal System; modern tram car; reliability; security
U231.7∶TP39
A
1005-8451(2015)04-0032-05
2014-09-25
甘肃省自然科学基金项目(1212RJZA046)。
彭 毅,在读硕士研究生;张 锐,在读硕士研究生。
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年1期)2020-09-21
哈尔滨铁道科技(2020年4期)2020-07-22
铁道通信信号(2020年10期)2020-02-07
铁道通信信号(2020年8期)2020-02-06
铁道通信信号(2019年3期)2019-04-25
电子制作(2019年23期)2019-02-23
铁道通信信号(2018年10期)2018-12-06
