空间碎片跟踪图像序列的目标识别方法∗
2015-06-27 04:01:59晨12平一鼎13
天文学报 2015年5期
张 晨12† 平一鼎13‡
(1中国科学院紫金山天文台南京210008)
(2中国科学院大学北京100049)
(3中国科学院空间目标与碎片观测重点实验室南京210008)
空间碎片跟踪图像序列的目标识别方法∗
张 晨1,2† 平一鼎1,3‡
(1中国科学院紫金山天文台南京210008)
(2中国科学院大学北京100049)
(3中国科学院空间目标与碎片观测重点实验室南京210008)
自动化观测已成为目前空间碎片光学观测的发展趋势,相应的完全无人工干预的目标自动识别成为迫切需要研究的课题.开环跟踪依据历史根数引导望远镜进行碎片的跟踪观测,是一种实现简单并且很稳健的观测方法.针对开环跟踪获取的观测图像,开展了目标在像素空间内的点列特征分析,提出使用像点簇识别算法来进行目标的自动识别,并对3种不同的簇识别算法实现进行了比较.
天体测量,技术:图像处理,望远镜,方法:观测,数据分析
1 引言
空间碎片光学观测与一般天文观测的最大不同在于,观测对象相对于背景恒星在快速移动.为了提高碎片的测量精度与测量深度,需要望远镜用目标跟踪的模式进行观测.
从实现方法的角度来说,碎片跟踪可分为闭环跟踪和开环跟踪两种方式.闭环跟踪是在跟踪期间实时地利用当前观测资料调整望远镜运动的跟踪方式.在早期的碎片观测中,由于当时的预报精度相对较低,观测需要人工干预,闭环方式发挥着重要作用.此外,在一些重要的观测任务或是观测新发现目标的时候,为了尽可能地延长观测弧段,这种方式也有着不可替代的作用.但是,闭环跟踪程序实现复杂,实时性要求高,需要大量的人工干预,在已有的自动化无人值守观测流程实现中,往往遇到跟踪过程不稳健的问题.
开环跟踪是在整个跟踪期间只利用预报数据引导望远镜运动的跟踪模式.目前已编目碎片预报精度已足够支持开环跟踪[1−2].相对于闭环跟踪模式,开环跟踪的实现中望远镜运动控制与图像数据处理分开,抗干扰能力强,容易实现稳健的跟踪,提供质量更稳定的目标数据.该模式在对已知目标的细致研究中,可以很好地发挥作用.
闭环跟踪和开环跟踪的核心差异在于,闭环跟踪观测过程中目标识别的工作或是已由观测员完成,或是由观测程序实时完成——观测过程跟踪不稳健的问题也正是由此而来;而后者的目标识别则可以在后期的数据处理过程中进行.为了适应当前大规模的空间碎片观测研究,这一过程也需要尽可能的自动化,而这也正是本文工作的目的.
已有的空间碎片观测图像自动识别方法,无论实时处理还是后期处理,主要方法都是以跟踪为前提,使用轨道信息[3−4]、角点特征[5]、边缘特征[6]等方法进行图像配准,分析图像前后帧之间的关系与差异,进而判断目标位置并拟合航迹.这样的做法,要么有很高的初值要求,要么需要通过大量的迭代计算来剔除虚警;而且在单帧图像的识别上,只利用了前后几帧的信息,使得识别可靠性不高,易受干扰.本文分析了开环跟踪观测数据序列的特征,提出以长弧段点列特征为基础的像点簇识别算法,进行目标的自动识别,以适应大规模的空间碎片采样工作.
2 碎片开环跟踪图像的特点
2.1 样本数据来源
四通道望远镜(Quad-Channel Telescope,简称QCT),是1台含有4支相同指向镜筒的望远镜,可以同时对相同天区进行4次独立采样.由于采样的同时性,该望远镜的重要特色之一是空间碎片多色测光,针对已知目标开展物理特性研究.为了大量目标的研究需求,在该望远镜上实现了自动开环跟踪观测流程,因此后期的数据处理工作效率极其依赖全自动的目标识别程序.本文工作采用了这台设备的观测图像作为算法研究样本.
QCT每个通道是一个300 mm口径、350 mm焦距的折射式望远镜,使用Andor DU888帧转移CCD,像元分辨率7.6′′/pixel,视场2◦×2◦.望远镜运行最大角速度5◦/s,角加速度1◦/s2;在V波段曝光1 s的探测能力约13 mag.
观测使用速度开环引导,即由观测预报给定初始时间和对应指向,跟踪启动后根据预报发送轴速度进行望远镜引导;引导数据由TLE(Two-Line Element)根数计算得到,计算中使用SGP4(Simplified General Perturbation Version 4)模型[7].
2.2 目标像点形态特征
空间碎片相对背景恒星快速运动的特点,使得它们的像斑在轮廓形态上有很大的差异.在跟踪观测中,望远镜指向与预报目标位置保持一致.当预报和望远镜控制达到较高的精度时,整个曝光周期内目标在视场内位置仅发生很小的变化(小于0.1 pixel),因而像斑轮廓圆整性好;与之对比的是背景恒星在整个曝光周期内在视场中发生了位移而使像斑拉长.
图1是同一视场内的碎片像斑与恒星像斑的比较.左右分别为碎片与恒星像斑放大16倍后的200∼2000等值线图.图像来源于2015年3月21日拍摄的火箭碎片CZ-4C R/B(2012-066D/NORAD 39014),目标在天球的运动速度为619.3′′/s,曝光时间0.5 s.
从图上可以看出明显的轮廓差异,计算得到两者长短轴之比分别为1.066和10.06.但是,由于恒星被拉长的过程中,还有大气抖动等其他影响因素,导致星像不再连贯.从等值线图上可以看出,当星像较暗时,检测到的将只是一些星像碎块;同时,由于望远镜伺服、与恒星相遇等原因,碎片目标星像也可能偶发性被拉长.因此轮廓形态只能给出大概的候选点,而不能完全确认目标.从统计结果看,低轨道目标由于运动速度快,预报误差大,星像更难以保持稳定.因此,相对于高轨道目标,低轨道目标的圆整性稍差一些.

图1 碎片像斑(左图)与恒星像斑(右图)轮廓对比Fig.1 The profile comparison between a debris spot(left)and a star spot(right)
2.3 目标像点像素空间点列特征
由于跟踪观测的特点,目标在视场内位移很小.因而在像素空间看整个图像序列,目标像点将分布在很小的区域内,即目标像点在像素空间具有团簇性.与此相对的是,暗弱恒星或者噪声带来的候选点不会聚集在一处.
图2是一整个弧段内的所有候选点在像素空间的分布情况. 观测数据来源于2015年3月20日的观测,目标是火箭碎片ARIANE 5 R/B(2012-075C/NORAD 39036).弧段内共计90次采样,以长宽比1.3为阈值提取候选点.将整个视场以16×16网格为合并尺寸,统计每个网格内候选点出现次数,得到该图.从图中可见,由于目标团簇的聚集,在目标所处位置出现峰值,远高于其他区域,因此可以很直观地给出目标所处区域的像素位置.

图2 候选点像素空间分布图Fig.2 The distribution of candidate points in pixel space
由于预报精度、望远镜轴系控制误差以及定心结果受到恒星影响等因素,目标不是完全固定在视场内的一个点,而是一个区域,且呈一定分布特征.图3是该弧段已确认目标点的图像位置随时间的变化关系.对该组数据做线性拟合,拟合斜率为系统差,拟合残差为随机差.从图上可见,随着时间的累积,系统差将远远大于随机差.在X方向上,有0.005 pixel/s的系统差以及0.19 pixel的随机差;在Y方向上,有0.024 pixel/s的系统差以及0.11 pixel的随机差.分析可知,系统差主要来源于预报与目标实际运动的差异.因此目标形成的簇不是一个简单的各向同性正态分布,而是有结构的;通过分析更多的样本我们发现,这个结构大多数情况下是直线,少数呈高阶曲线,但都是接近于平滑的曲线而非杂乱的随机分布.

图3 目标像素坐标X(左图)和Y(右图)随时间变化Fig.3 The variations of object’s pixel positions X(left)and Y(right)with time
2.4 目标像点航迹特征
空间碎片航迹特征是独立于像素空间特征的另一特征,也可用于目标识别.在短弧段内碎片在天球坐标中的航迹可以用多项式来近似表达[8−9].图4是ARIANE 5 R/B在天球坐标系下的航迹,分别为赤经和赤纬随时间的变化.蓝色三角形图标为像素空间内符合目标像点轮廓及分布特征的像点集合,而红色圆点图标为天球坐标系内符合拟合航迹的像点集合(重复点被蓝色三角形覆盖).从图上可以看出蓝色三角形缺少了一部分点,这是因为在搜索候选点的过程中,为了减少虚警点的数量,使用了更加严格的约束条件,导致部分目标像点被排除在外.因此,在识别过程中需要引入航迹信息以得到更加完整与可靠的识别结果.
3 目标识别算法
基于以上分析所得到的目标轮廓特征、像素空间点列特征以及天球坐标系航迹特征,本文建立了一套综合算法,用以提取目标像点.
3.1 识别前处理
首先使用SExtractor[10]扫描全视场星像,输出长宽比、中心像素坐标.由于处理的是碎片的跟踪图像,设置扫描参数时需要注意与重叠星像分离有关的参数.拉长的恒星像斑可能存在多个峰值,过小的分离对比度会导致星像分裂,而过大的分离对比度会导致多个像斑的粘连.因此,这个参数随着星像拉长程度的不同,需要适当的调整以得到最好的探测深度以及准确率.星像扫描后,使用WCSTools[11]进行天文定位建立WCS[12],给出星像的天球坐标,用于后续的识别处理.
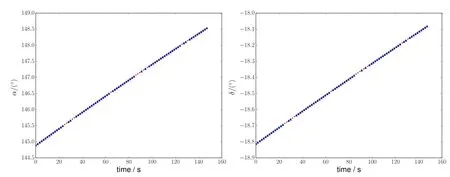
图4 目标赤经α(左图)和赤纬δ(右图)空间航迹Fig.4 The object space tracks of right ascension α(left)and declination δ(right)
3.2 候选点
利用像斑轮廓圆整性特征,筛选出长宽比接近于1的候选点,这将去掉大部分拉长的恒星像点而保留目标像点,但是会包含部分暗弱目标像点、大气抖动带来的星像碎块以及背景噪声点.
3.3 簇识别
将观测弧段中所有图像内的候选点列于同一像素空间,利用像点在像素空间的团簇性分布特征,找出目标团簇所包含的点.整个方法中,簇识别算法是重点,是在无初值输入条件下快速确定目标位置的基础.簇识别的核心是通过簇的聚集特性,分离聚集点和离散点,可以通过定位簇位置来找到聚合点,也可以是相反的过程先找到点集再判断是否达到聚集为簇的标准.针对不同的搜索方案,我们使用了3种算法实现,依据不同的识别特征,分别是质心聚焦法(CF,Centroid Focusing),二维直方图统计法(BDH, Bi-dimensional Histogram)和邻域连通法(FoF,Friends of Friends)[13].
3.3.1 质心聚焦法
质心聚焦法是利用团簇对点集质心的影响来进行目标识别的.当点集数量很大时,由于非目标点分布的随机性,质心在窗口几何中心附近,加上目标点团簇之后,质心将偏向目标所在位置;当点集数量相对较少时,目标点团簇的数量优势,将使得质心仍然是趋近目标位置.因此,使用迭代的方式,逐渐缩小窗口,在保持目标处于窗口中心附近的同时剔除最外围的点,使得计算质心逐渐逼近目标位置.当两次计算质心在相同位置时,表明两次不同大小的窗口内是同一点集,即可认为这些点处于聚集状态,为一个簇.
计算过程为:先假定视场中心(预期目标位置)为目标所在点,全视场为窗口,计算窗口内像点等权质心,如下式:

式中(xi,yi)为窗口内包含的N个点中的第i个点的像素坐标,(xc,yc)则为窗口质心.
以新的质心点为中心,缩小窗口,再次计算质心;重复以上迭代过程,直到两次计算质心位置小于预定阈值,则认为窗口内的所有点形成一个簇.该方法的调整参数主要有窗口缩减速度,以迭代窗口缩减因子η=sizei/sizei−1(0<η<1)表示.缩减速度过小意味着需要进行更多次的迭代,且更容易在不恰当的时候触发计算完成判断条件,导致未完成计算;而缩减速度过快,则会提高剔除掉真实点的概率,进而导致计算失败.该值与总的跟踪不确定度相关(包括望远镜跟踪精度、预报计算精度及观测弧长),并可据此作为评价条件.在QCT图像计算中,低轨道目标常使用0.85作为窗口缩减因子.
该方法的使用前提是除了目标簇之外,其余点都是杂散点,且接近随机分布.这意味着该方法的应用局限于单目标图像,无法应对伴飞目标状况;且对图像质量有要求,局部区域的大量虚警点(云、月光等)将会严重影响质心的计算而导致失败.同时,该算法对簇弥散度与弥散形态也有一定要求,太大范围的弥散将使得计算目标窗口过大,其中包括太多的杂散点而影响后续计算.
3.3.2 二维直方图统计法
二维直方图统计法直接利用目标点集的团簇性特征来进行目标识别.在适当的合并尺寸下进行直方图统计,可以快速地确定高于预定阈值的簇所处区域.考虑到网格的划分是固定大小及位置的,一个团簇可能会处于多个网格的交界处,因此需要以网格内点质心为中心移动窗口,把更多的目标点置入窗口内,从而对所有目标点进行标记.
具体计算过程为,先对整个视场进行网格化划分,计算每个网格内像点频数.选择频数高于预设阈值的网格,计算网格内点质心,再以该质心为中心建立窗口,标记窗口内的点,这些标记点则构成一个团簇.
该方法主要影响参数为网格合并尺寸,网格尺寸越大,格内的杂散点出现概率越大;而网格尺寸越小,则簇被分到多个网格的概率越大.这个值的大小取决于目标跟踪总不确定度.在QCT图像计算中,针对短弧段的观测数据,通常定义到全视场的1/16时,识别率与计算速度有较均衡的表现.
该方法可以应对多目标伴飞的情况,计算速度表现均衡,主要压力来源于对全视场候选点一次遍历.对目标簇弥散度有一定的要求,如果弥散范围超过窗口尺寸,往往会丢失点,使得后续计算失败的概率提高.
3.3.3 邻域连通法
邻域连通法是利用点与点之间的相关性进行目标识别的.该算法将距离小于预设阈值的点标记为同一簇;同时该规则具备传递性,通过树型查找,可以将距离稍远的点通过它们之间的点连接到一起,成为一个连通的簇.该方法广泛应用于数值模拟中Halo的识别以及观测中星系结构的识别.图5示意了点与点之间的连接方式.
具体计算过程为,首先选定任一候选点作为团簇起始点,计算其与其他点的距离,将距离小于预设阈值的周边点记作该团簇内点;对新加入簇内的点,进行同样的计算,找出它们的周边点,记作该团簇内点,并重复迭代,直到新加入的点不再有新的周边点,这样就完成了一个团簇的搜索.将所有的团簇标记之后,选择内点数量大于预设阈值的团簇作为目标集.
影响该方法的最主要的参数是一个判断两点是否相邻的阈值.过大会导致过多无关点的关联,而过小则会导致簇的分裂.参数值的评估取决于跟踪的平均不确定度.在QCT图像计算中,高轨目标选取1 pixel,而低轨目标选取3 pixel.
该方法的计算量稍大,每个簇都需要进行多次树型的搜索,涉及大量的数组增删操作.但是对于目标点弥散形态、弥散度、背景点分布等的容差性最强,筛选出的目标集最完整且虚警最少.同样,该算法适用同一视场多目标识别.
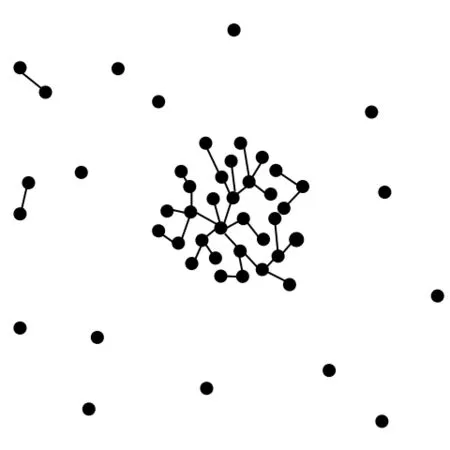
图5 FoF算法连接方式示意图[14]Fig.5 The diagram of the FoF algorithm linking method[14]
3.4 航迹拟合
经过簇识别过程,已经可以确定大部分的目标点,并且多个目标也已经分离;但在团簇内会不可避免地出现一些虚警点,也会出现正确的候选点被剔除的情况.尽可能处理这些问题是有必要的,因为对于光度等研究来说,更少的虚警和更完整的光变曲线都有助于更好地研究目标的特性.因此,航迹特征作为一个更强的约束条件,可以用于完善目标像点提取结果.利用短弧航迹的连贯性特征,对簇内点在天球坐标空间内进行拟合.
目标天文定位后得到的是赤经与赤纬,若直接使用赤道坐标值表达航迹,极区附近的航迹会扭曲成更高阶的曲线,使得拟合难度增加.因此,首先要对坐标进行变换.在这里,我们使用心射投影将赤道坐标(α,δ)变换到理想坐标(ξ,η),如下式所示.变换参考点(α0,δ0)选用航迹序列中间时刻对应的坐标.

然后,对簇内点航迹的理想坐标进行2阶拟合,如下式表示的目标理想坐标(ξ,η)随时间t的变化关系,a0∼a2、b0∼b2分别为拟合参数.之所以使用精度较低的低阶拟合,是因为经过大量测试表明,在坏点过多的情况下,低阶拟合可以降低拟合曲线被扭曲的风险.该次拟合主要使用拟合残差剔除明显的坏点;同时,若剔除后余点过少,将判定识别出的簇是虚警.

最后,对剔除坏点后的点集进行3阶拟合,如下式表示的目标理想坐标(ξ,η)随时间t的变化关系,a0∼a3、b0∼b3分别为拟合参数.经过大量测试可知,在短弧段观测中,使用3阶拟合在拟合精度与普适的稳定性方面有一个良好的平衡.拟合参数推算出的航迹变换回赤道坐标之后,就是每帧图像中目标点的预期位置,可以帮助在更宽松的轮廓条件下寻找目标点;航迹拟合残差与WCS拟合残差的比较可以更精细地确认整个航迹是否是虚警;而拟合航迹在天球坐标下的运动特征也可以用于甄别是否是误识别的恒星.

4 实测对比分析
为了测试目标识别算法的可靠性和容差性,我们选择了1组实测样本进行试验.数据样本来源于QCT为期5 d的自动观测所采集的所有火箭碎片图像序列,涵盖多种采样情况,包括不同轨道高度、不同的采样间隔(低轨道目标使用更短的曝光时间)、不同信噪比(直至目标不可见)、多目标(包括伴飞和交叉)、不同程度的天气和月光影响等.数据样本共计793圈,每圈15∼90个采样点,其中低于8 000 km的目标240圈,8000∼20000 km的目标102圈,高于20 000 km的目标451圈.
分别使用3种算法实现对整个样本组进行计算,记录目标识别结果及计算时间.根据望远镜的观测特性,选择了一组相对合适的参数进行计算,并保持所有的计算使用同一组参数.
(1)候选点长宽比,若全图目标长宽比中值小于1.5,则阈值为1.15,否则阈值为1.3;
(2)目标流量大于630,即未定标星等小于−7 mag;
(3)簇内点数不小于采样次数的1/4;
(4)航迹拟合点数不少于8点,使用2阶拟合剔除坏点,3阶拟合得到航迹;
(5)质心聚焦法窗口收敛比例为0.85,簇质心收敛判据为两次计算质心差异在X和Y方向均小于1.5 pixel;
(6)二维直方图统计法,直方图网格尺寸为16 pixel×16 pixel;
(7)邻域连通法,两个目标点相邻的判据是质心差异在X和Y方向均小于2 pixel.
对所有输出结果采用人为确认的方式进行目标证认,以分析目标识别的可靠性.目标总数为该组计算所有输出目标数量,已确认的是人为证认符合计算要求的目标数量(例如快速划过视场而非固定在小区域的目标不纳入已确认之列);错误目标表示识别结果是虚警的数量;未识别目标表示已确认目标但未被识别的数量;识别率是该组计算所有识别的结果占总确认结果的比例;错误率是该组计算中错误目标占总输出目标数量的比例.所有结果见表1.

表1 目标识别情况统计Table 1 The statistics of the object recognition result
从统计结果中可知以下几点特征:
(1)质心聚焦法的识别可靠性最高,虚警点少,但是漏目标较多.这是由于该计算假定图像只有一个聚集中心,因此当出现多目标情况,或者图像受到外界光干扰导致候选点分布极度不均匀的时候,识别目标会失败.该方法适合低轨快速运动目标的识别,因为在低轨观测中较少出现同一视场多目标且背景恒星与目标轮廓差异明显,使得识别过程较少受到非目标点的干扰;
(2)二维直方图统计法的虚警率较高,是质心聚焦法的7.6倍,邻域连通法的5.2倍.这是由于该方法固定了计算窗口,在对跟踪误差较大的目标进行识别时,会将同一弧段的点分到不同的簇内,从而产生两个目标;同时每个簇的点都相对不足,导致拟合误差增加,需要更多的计算来进行簇的归属判断.但是,在视场更大、候选点更多的情况下,该方法可作为计算目标大概位置的方法,为其他精细的识别减小计算压力;
(3)邻域连通法的识别率最高,错误率也保持与质心聚焦法接近的低水平,性能表现均衡.该方法最直接地使用了目标点的团簇性特征进行分析,少量的误判和丢失主要来源于跟踪误差稍大的源,当间隔过大的时候有可能会导致团簇的分离.同时,随着候选点数量的增加,计算量会大幅增加.
5 结论与展望
以上研究充分说明,本文使用的簇识别算法,可以快速定位目标所处区域,使得目标自动识别更加稳健可靠,满足对于已编目目标日益增加的观测需求,极大地提高了研究效率.
本方法具备可观的识别率和容错率,其中邻域连通法是综合性能最好的一种.实验数据只使用了相同参数进行计算,在实际应用中,将参考更多的观测信息,例如曝光时间、轨道高度、恒星轮廓平均长宽比等,协助自适应参数优化;同时对观测参数也进行适应性调整,使得恒星与目标的特征差异更加明显,以达到更好的识别水平和容错性.
参考文献
[1]韦栋,赵长印.天文学报,2009,50:332
[2]Wei D,Zhao C Y.ChA&A,2010,34:69
[3]张晓祥,吴连大,熊建宁.天文学报,2004,44:405
[4]Zhang X X,Wu L D,Xiong J N.ChA&A,2004,28:94
[5]王蒙,戴亚平.北京理工大学学报,2013,33:1045
[6]陈娟,陈乾辉,师路欢,等.中国光学与应用光学,2009,2:46
[7]Hoots F R,Roehrich R L.Models for Propagation of NORD Elements Sets.Spacetrack Report,1980, 1:1
[8]吴会英,吴连大.天文学报,2005,46:433
[9]Wu H Y,Wu L D.ChA&A,2005,29:430
[10]Bertin E,Arnouts S.A&AS,1996,117:393
[11]Mink D J.adass,2002,281:169
[12]Greise E W,Calabretta M R.A&A,2002,395:1061
[13]Davis M,Efstathiou G,Frenk C S,et al.ApJ,1985,292:371
[14]More S,Kravtsov A V,Dalal N,et al.ApJS,2011,195:4
Object Recognition Method of Space Debris Tracking Image Sequence
ZHANG Chen1,2PING Yi-ding1,3
(1 Purple Mountain Observatory,Chinese Academy of Sciences,Nanjing 210008)
(2 University of Chinese Academy of Sciences,Beijing 100049)
(3 Key Laboratory of Space Object and Debris Observation,Chinese Academy of Sciences, Nanjing 210008)
In order to strengthen the capability of the space debris researches,automated optical observation becomes more and more popular.Thus,the fully unattended automated object recognition framework is urgently needed to be studied.On the other hand,the open loop tracking which guides the telescope only with historical orbital elements is a simple and robust way to track space debris.According to the analysis of point distribution characteristics in pixel domain of object’s open loop tracking image sequence,the Cluster Identification Method is introduced into automated space debris recognition method.With the comparison of three algorithm implements,it is shown that this method is totally available in actual research work.
astrometry,techniques:image processing,telescopes,methods:observational,data analysis
P123;
A
10.15940/j.cnki.0001-5245.2015.05.010
2015-04-22收到原稿,2015-04-27收到修改稿
∗国家自然科学基金项目(11373071)资助
†zhangchen@pmo.ac.cn
‡ydping@pmo.ac.cn
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:24:26
中国光学(2021年6期)2021-11-25 07:48:32
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
青年歌声(2019年12期)2019-12-17 06:32:32
中国医疗设备(2019年1期)2019-01-15 12:10:54
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
激光与红外(2015年10期)2015-03-23 06:07:18
舰船科学技术(2015年8期)2015-02-27 15:38:47
航天器工程(2014年5期)2014-03-11 16:35:53