基于车辆声音及震动信号相融合的车型识别
2015-06-26 15:58焦琴琴牛力瑶孙壮文
网络安全与数据管理 2015年11期
焦琴琴,牛力瑶,孙壮文
(长安大学信息工程学院,陕西西安710064)
基于车辆声音及震动信号相融合的车型识别
焦琴琴,牛力瑶,孙壮文
(长安大学信息工程学院,陕西西安710064)
车型识别技术是智能运输系统的核心。针对目前车型识别方法的不足,提出了一种基于车辆声音和震动信号相融合的车型识别方法。用BCS算法提取声震信号的特征,并在特征级融合形成特征向量,以此作为训练样本对支持向量机的分类器进行训练。对两种车型的声音和震动数据进行处理的结果表明,基于特征级融合的声震信号能够准确识别不同的车型,识别准确率达到86%以上,是一种有效的车型识别方法。
车型识别;声震信号;特征融合;支持向量机
0 引言
近年来,交通拥挤和阻塞问题越发严重,现代化智能交通系统的应用成为解决交通问题的重要手段,交通管理系统是智能交通系统的核心,而车型的自动识别技术是智能交通管理系统的关键技术之一。国内外关于车型识别技术已经做了大量的研究,主要的方法有电子标签识别法、电磁感应线圈识别法、红外探测法、车牌识别法[1]和基于视频图像的车型识别[2-3],这些方法均因其自身的不足使其应用受到了限制。不同车型在行驶时其产生的震动和声音信号具有一定的差异[4],而且利用震动与声音信号的车型识别是一种被动识别技术,其具有成本低、运算速度快等优点,因此,基于车辆声音和震动信号的车型识别近些年成为国内外研究的热点。
Marco等应用FFT的方法提取车辆声震信号的特征,并且采用决策级进行融合来对车型进行识别[5]; Navdeep等应用频谱统计和小波系数特征的算法,在时域和时频域分析震动信号[6];Ahmad等在时频域采用了短时傅立叶变换和功率谱能量的方法提取车辆声音信号的特征,并以支持向量机的分类器进行目标分类[7];Manisha等应用傅立叶变换和时域波形相结合的方法对车辆声信号进行分析,构建神经网络分类器分类识别,并且用融合矩阵对结果作融合处理[8];张亚东等提出了一种将维谱结合小波包能量的特征提取方法,该方法用维谱消除了车辆引起的地震动信号中的高斯白噪声或有色噪声,构建以维谱和小波包能量谱作为震动信号的联合特征向量,并建立以训练误差为目标的BP神经网络模式分类器识别车型[9];Anami等分别在时域和频域分析车辆声信号,并且比较使用三种不同分类器的目标识别结果[10];Ozgundaz等采用梅尔倒谱系数算法提取声震信号的特征,并应用支持向量机的分类器对不同车型分类[11]。但是,上述方法大部分都只是采用单一信号作为目标识别信号,或只是在决策级进行了结果融合。由于单一信号容易受到天气、环境、噪声等外界条件因素的影响,不能完全代表车辆信号的特征,并且决策级融合容易损失大量的信息,因此识别能力差。
针对现有车型识别方法的不足,本文提出了一种基于车辆声音和震动信号相融合的车型识别方法。首先采用分块倒谱加和(Block Cepstrum Summation,BCS)的算法分别提取车辆声音信号和震动信号的特征向量,然后进行特征级融合形成融合特征向量,最后应用支持向量机(Support Vector Machine,SVM)分类器进行目标识别。本文以美国DARPA SensIT项目组记录的实际数据来进行验证。实验结果表明,该方法用于车型识别的准确率可以达到86%以上。
1 声震信号特征提取BCS算法
由于声音信号和震动信号在时域上的变化非常快,呈现一定的非平稳性,而且通常情况下不同车型的声音和震动信号在时域特征区别不是很明显,因此,本文基于信号的频谱分析,提出一种基于分帧、分块思想的BCS算法提取信号的特征。具体的特征提取算法描述如下:
(1)设某一个声音信号样本文件为xa,对声音信号进行分帧,每一个信号文件分为N帧,则有:

其中xai表示每一帧的信号,i=1,2,…,N。
(2)对每一帧信号进行分块,每一帧分为M块。每块的信号长度为N1,对于任意的信号xai,有:

式中xaij代表每一块的声音信号,j=1,2,…,M,i=1,2,…,N。
(3)运用FFT求每一块信号的频谱幅值。设Xaij[k]为信号傅立叶变换的频谱值,有:

式中xaij(n)表示每一块中的信号值,其中,i=1,2,…,N;j=1,2,…,M;n=1,2,…,N1;k=1,2,…,N1。
(4)计算块能量值,则有:

式中Ei(j)表示第i帧中第j块的能量值,i=1,2,…,N;j= 1,2,…,M。
(5)根据式(4)计算声音信号文件N帧的能量值,设Ta为信号文件的能量值,则:

式中Ta为N×M维的行向量。
(6)每两个相邻的能量值相加,得出声音信号文件的特征向量Taf,其维数为L,设Fam为能量相加后的值,m=1,2,…,L,则:

式中Taf为一个声音信号样本的特征向量。
(7)由上述步骤可以求出震动信号的特征向量,设Tsf为一个震动信号样本的特征向量,则:

式中Tsf为一个震动信号样本的特征向量。
(8)设T为声音信号和震动信号的融合特征向量,则有:

式中T为一个1×2L的行向量。
2 基于支持向量机的车型识别
支持向量机(Support Vector Machine,SVM)是一种通过核函数从低维的线性不可分向高维的线性可分转化,以通过寻求支持向量来确定最优分类超平面,以此来进行识别、分类、逼近等的机器学习。
设线性可分的样本集xi和它的分类yi表示为{(xi,yi)},xi∈Rd,yi∈{-1,1},其中,i=1,2,…,n,d是空间维数。线性判别函数的一般形式为g(x)=ω·x+b,分类面方程为:

将判别函数进行归一化,使得所有|g(x)|≥1,使离分类面最近的样本|g(x)|=1,这样分类间隔就等于2/‖ω‖,因此使其间隔最大等价于使‖ω‖或‖ω‖2最小;而要求分类线对所有样本正确分类,就是要求它满足:

因此,满足上述条件且使‖ω‖2最小的分类面就是最优分类面。最优分类面问题可以转换为如下的约束问题,在式(10)的约束下,求函数

的最小值,因此可以定义如下的Lagrange函数:

其中,αi>0为Lagrange系数,现在的问题是在约束条件…,n下对ω和b求Lagrange函数的极小值。
最优分类面的权系数向量是训练样本向量的线性组合,且这个优化问题的解还必须满足:

任意一个支持向量可以用式(12)求得。
构造最优超平面,一般采用满足Mercer条件的核函数来代替空间中内积的运算。此时优化函数为:

相应的判别函数式变为:

其中sgn为符号函数,b*为分类阈值。这就是支持向量机,它能够把输入空间数据映射到一个高维特征空间中去,使其线性可分。
本文选用支持向量机(SVM)作为车型识别算法,选择不同的内积核函数形成不同的分类算法,常用的核函数有线性核函数、多项式核函数、RBF(径向基)核函数和Sigmoid核函数,文中选用的是RBF(径向基)核函数。
3 测试结果及分析
文中的实验数据来源于美国DARPA SensIT项目组在2001年11月于29CA做的实验记录[5],该数据记录包含两种不同车辆的数据集(这两种车分别用AAV和DW来表示,AAV为履带式车,DW为重型轮式车),分别由声音、震动和红外三种类型的传感器采集,每种传感器采样频率均为4 960 Hz。本文只采用声音和震动信号来作为车型识别的目标信号。
图1、图2分别给出了AAV车和DW车在行驶时产生的声音和震动信号的时域波形以及对应频谱。从图1可以看出,这两种车型的声音信号和震动信号的时域特征不很明显,而图2中频谱图显示,AAV车型声音信号能量主要集中在120 Hz左右(图2(a)),DW车型声音信号能量主要集中在零频处和80 Hz、150 Hz左右处(图2(b)),能量值相差明显;对于震动信号,AAV车型的能量主要在30 Hz和65 Hz附近处(图2(c)),DW车型的能量主要在0~50 Hz之间(图2(d)),并且能量值相差较大。这两种车型的频谱特征明显,因此本文从频谱的角度来分析车辆声音和震动信号。

图1 两种信号时域波形
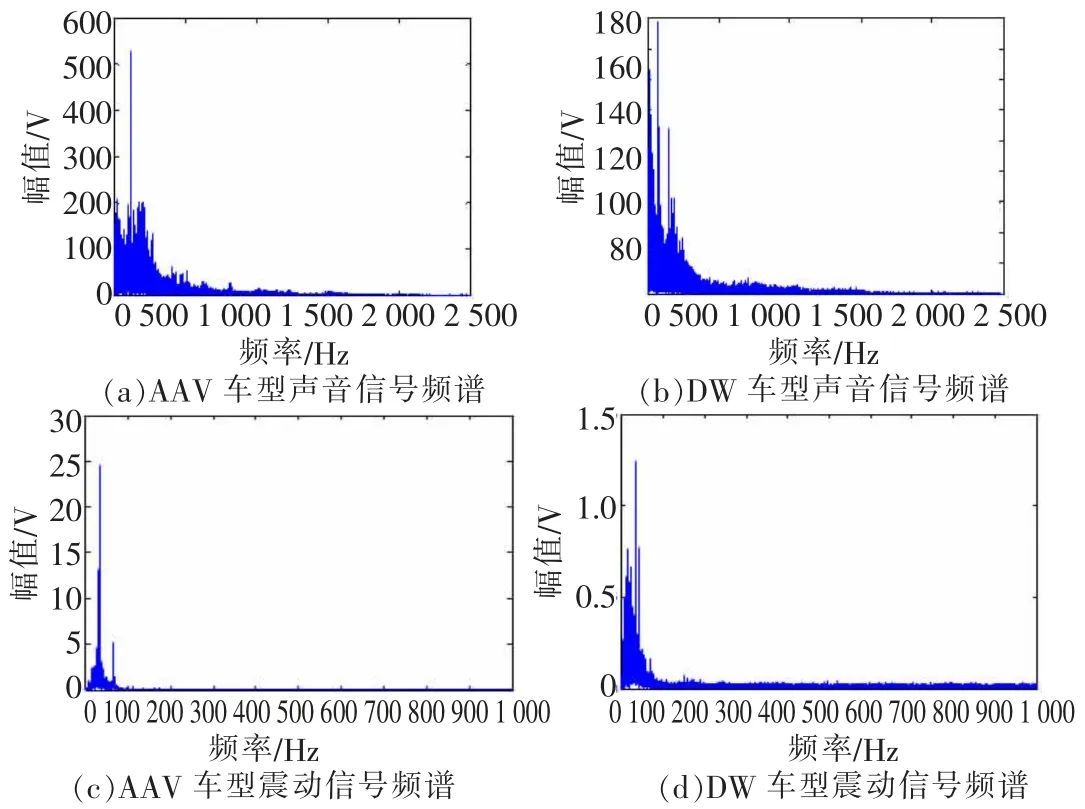
图2 两种信号频谱
文中采用有效的声音和震动信号文件总共542个,声音信号文件和震动信号文件均为271个。每个信号文件的长度为6帧(N=6),每一帧分为30块(M=30),每一块包含256个采样值(N1=256),由上式(3)~式(8)得出了声震信号的融合特征向量为:T=[Fa1,Fa2,…,Fa90,Fs1,Fs2,…,Fs90],其中T为1×180的行向量。
文中两种车型总样本数为271个,包含AAV车型样本数123个,DW车型样本数148个,其中182组数据作为训练样本,其余的89组数据作为测试样本。测试样本中AAV车型的数目为39,DW车型的数目为50。表1给出了利用本文算法的识别结果,从表1中可以看出,两种车型的平均识别率达到86.52%,表明了本文识别算法的有效性。
为了进一步验证本文声震信号特征级融合及BCS特征提取算法的有效性,分别对单一的声音信号和震动信号进行了分类识别,并且与参考文献[5]中的识别结果进行了对比,结果如表2。

表1 融合特征SVM识别结果
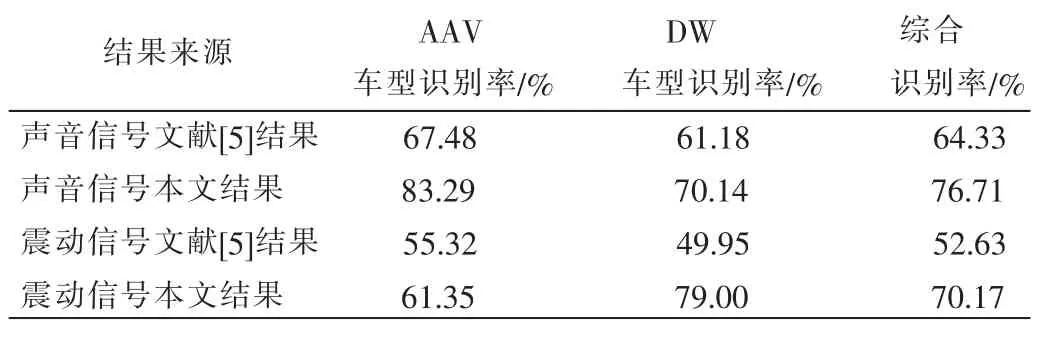
表2 两种特征提取方法信号SVM识别结果
由表1、表2可以得出,本文提出的BCS特征提取算法得到的识别结果明显高于参考文献[5]中的识别结果,特征级融合后具有更高的识别精度,表明了本文提出的BCS及特征级融合算法对于车型识别是有效的,并且这种特征提取算法同时适用于声音和震动信号的分析。
4 结论
本文提出了一种基于车辆声音和震动信号相融合的车型识别方法,利用分块倒谱加和(BCS)算法提取车辆声音和震动信号的特征,并且在特征级融合形成融合特征向量,构造支持向量机的分类器对两种车型进行目标识别,试验结果表明,基于车辆声音和震动信号相融合的识别方法分类效果良好,具有一定的可行性。本文只是对两种车型进行识别,在实际环境中,多个目标能够产生声震信号,因此多目标识别是未来研究的方向,并且文中只采用一种分类器进行目标识别,选用其他的分类器进行结果对比还需进一步研究。
[1]陈俊杰,山宝银.5.8 GHz电子不停车收费技术综述[J].同济大学学报(自然科学版),2010,38(11):1675-1681.
[2]华莉琴,许维,王拓,等.采用改进的尺度不变特征转换及多视角模型对车型识别[J].西安交通大学学报,2013,47(4):92-99.
[3]Chen Zezhi,PEARS N,FREEMAN M.A gaussian mixture model and support vector manchine approach to vehicle typeandcolourclassification[J].IntelligentTransport Systems,IET,2014,8(2):135-144.
[4]王双维,陈强,李江,等.不同车型的车辆声音与震动信号特征研究[J].声学技术,2007,26(3):460-463.
[5]DUARTEMF,HUYH.Vehicleclassificationin distributedsensornetworks[J].JournalofParalleland Distributed Computing,2004,64(7):826-838.
[6]SHARMAN,JAIRATHAK,SINGHB,etal. Detectionofvariou svehiclesusingwirelessseismeic sensornetwork[C].2012InernationalConferenceon AdvancesinMobileNetwork,Communicationandits Application(MNCAPPS).Bangalore:IEEE,2012:149-155.
[7]ALJAAFREH A,Liang Dong.An evaluation of feature extraction methods for vehicle classification based on acoustic signals[C].2010 International Conference on Networking Sensing and Control(ICNSC).Chicago,2010:570-575.
[8]KANDPAL M,KAKAR V K,VERMA G.Classification of ground vehicles using acoustic signal processing and neural network classifier[C].International Conference on Signal ProcessingandCommunication(ICSC).Noida:IEEE,2013:512-518.
[9]张亚东,华春荣,董大伟,等.用维谱结合小波包能量提取地震动信号特征[J].噪声与振动控制,2014,34(1):164-168.
[10]ANAMI B S,PAGI V B,MAGI S M.Comparative performance analysis of three classifiers for acousic signalbased on recognition of motorcycles using time-and frequency domain features[J].Intelligent Transport Systems,IET,2012,6(3):235:242.
[11]OZGUNDAZ E,TURKEN H I,SENTURK T,et al.Vehicle identification using acoustic and seismic signals[C]. Signal Processing and Communications Applications Conference(SIU),2010 IEEE 18th.Diyarbakir:IEEE,2010:941-944.
Vehicle recognition based on fusion of acoustic and seismic signals
Jiao Qinqin,Niu Liyao,Sun Zhuangwen
(School of Information Engineering,Chang′an University,Xi′an 710064,China)
Vehicle identification technology is the core of the intelligent transportation management systems.Aiming at the defects of the current recognition methods,this paper proposes a vehicle identification method based on the fusion of acoustic and seismic signals.The BCS algorithm is used to extract features of signals,then fused eigenvectors on feature-level is formedto use as training samples of SVM classifier.The results of data processing for acoustic and seismic signals of two kinds of vehicles show that it can accurately identify various vehicles with the acoustic and seismic signals based on feature level fusion,the recognition rate is 86%,and it is an effective method for vehicle recognition.
vehicle recognition;acoustic and seismic signals;feature fusion;SVM
TP391.4
A
1674-7720(2015)11-0079-04
2015-02-01)
焦琴琴(1990-),女,硕士,主要研究方向:智能交通与信号处理。
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
保定学院学报(2022年2期)2022-04-07
科学大众(2020年12期)2020-08-13
文萃报·周二版(2020年23期)2020-06-19
许昌学院学报(2018年4期)2018-05-02
中国公路(2017年18期)2018-01-23
计算机应用(2017年4期)2017-06-27
中华建设(2017年1期)2017-06-07
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07