机载PMSM伺服作动系统约束反演控制
2015-06-24 06:23陈晓雷吕帅帅
电工技术学报 2015年21期
陈晓雷 林 辉 吕帅帅
(西北工业大学自动化学院 西安 710129)
0 引言
机电伺服作动系统是多电飞机的核心组成部分[1]。近年来,随着功率电传技术的发展,尤其是高压直流电源系统的采用,使得大功率机电作动系统在飞机上的应用成为现实,弥补了传统液压作动机构的缺陷,极大地提高了飞机的操纵和控制性能[2]。机电作动系统中,伺服电动机及控制器是关键所在。永磁同步电动机(Permanent Magnet Synchronous Motors,PMSM)具有转矩脉动小、调速范围宽以及功率密度高等优势,在航空领域具有良好的发展前景。
然而,PMSM 本身具有多变量、非线性及强耦合等特点[3],而机载作动伺服系统的工作环境尤为严酷,环境温度变化较大,导致电动机参数(如绕组电阻、永磁体性能和粘性摩擦系数等)会有较大变动,在不同飞行状态下也存在负载变化,以上原因导致实现高精度位置控制难度较大。此外,与常规位置伺服系统不同,机载作动系统作为飞控系统的子系统,其输出量即舵面偏角与飞机飞行姿态息息相关,若舵面偏转角误差过大,即使子系统稳态性能可以保证,但必然对飞控系统的机动性能和稳定性产生负面影响。为保障可靠性,通常对舵面偏角误差的上下界做出严格限制。现有PMSM 位置伺服控制方法包括分数阶控制[4]、自适应控制[5]、滑模控制[6,7]以及LPV 控制[8]等。文献[4,5]所提控制策略不足之处在于控制器结构或参数自适应律复杂。文献[6-8]的优势是不严格依赖精确数学模型,控制算法可保证系统渐进稳定,但缺陷是系统动态性能依赖参数整定,控制精度难以得到保障。
长久以来,Lyapunov 函数被视为非线性系统稳定性分析的有力工具。文献[9]提出并完善了反演控制(Backstepping Control)方法,通过设计满足需求的中间虚拟控制量和分项控制Lyapunov 函数(Control Lyapunov Function,CLF),反向递推获得反馈控制律和整体CLF。该策略将CLF 构造和镇定控制律设计紧密结合,适用于严格反馈系统(如PMSM 位置伺服系统)。文献[10]提出一种反演滑模控制策略。文献[11]提出一种积分反演控制策略,采用自适应关联观测器估算转子位置及转速。文献[12]提出一种自适应反演控制策略,采用反演观测器实现无传感器控制。文献[13]针对PMSM 参数时变问题,设计参数自适应律及反演控制器。然而,常规反演控制只能保证伺服系统的稳定性,无法处理输出误差约束问题。近年来,通过对二次型结构CLF 的改进,该问题已取得一定研究成果。文献[14]针对含状态约束的Brunovsky标准型系统,以约束区间作为定义域,构造对数型及反正切型障碍函数作为CLF 实现反演控制。在文献[14]的基础上,文献[15]将此类基于障碍函数的CLF 定义为障碍Lyapunov 函数(Barrier Lyapunov Function,BLF),针对严格反馈系统进行反演设计,可保证系统输出有界。
本文在以上研究的基础上,借鉴文献[15]的思想,提出一种基于对称BLF 的反演控制策略。为补偿负载扰动和参数变化,消除未建模动态引起的稳态误差,在控制设计环节增加积分项[16]。通过Lyapunov方法证明闭环系统的全局渐进稳定性,闭环系统信号一致有界,跟踪误差可收敛到原点较小邻域,且控制过程中舵面跟踪误差始终保持在约束区间内。通过仿真和实验验证了本文方法的有效性。
1 机载PMSM 伺服作动系统模型
机电作动伺服系统的目的是实现舵面对给定位置指令的准确跟踪。为提高系统可靠性,降低故障率,通常采用余度结构,在结构设计中采用位置控制器、两套PMSM 电动机及驱动器并行工作的方式,通过差动周转轮系实现驱动轴机械运动的合成,输出低转速、高扭矩的动力,作用到传动链实现舵面收放。简单起见,本文考虑正常工况,假设两套电动机参数相同,则转速相同时不存在力纷争问题。
假设磁路不饱和,不计磁滞和涡流损耗影响,气隙磁场呈正弦分布,定子为三相对称绕组,转子无阻尼绕组。隐极式PMSM 的数学模型为[17]
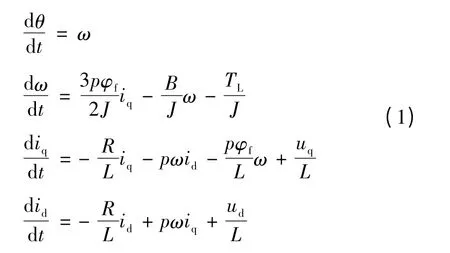
式中:θ 为转子机械角位移;ω 为转子机械角速度;p 为磁极对数;φf为转子永磁体在定子上的耦合磁链;J 为折算到电动机轴上的等效转动惯量;id、iq分别为定子电流矢量的d、q 轴分量;B 为粘滞系数;TL为负载转矩;R 为绕组电阻;L 为绕组电感;uq、ud分别为定子电压矢量的d、q 轴分量。
不考虑传动链的间隙与弹性变形,θ 与舵面转角φ 的关系为

式中kr为传动链的减速比。
TL与空气特性、飞机飞行马赫数、飞行高度、飞行攻角以及舵面转角等均相关,简单起见,认为TL与φ 呈线性关系,为弹性负载

式中:T0为舵面处于收拢状态时的负载转矩;kθ为线性比例系数。
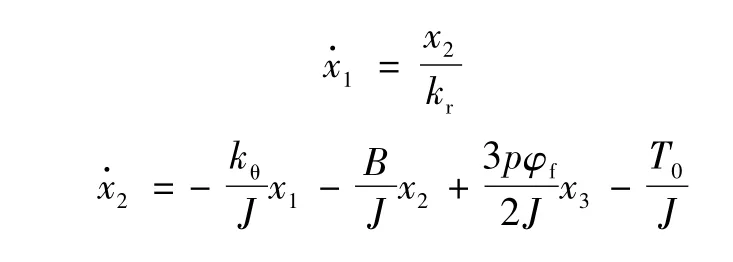
取状态变量[xi]=[φ,ω,iq,id],联立式(1)~式(3),可得PMSM 伺服作动系统数学模型为

2 控制器设计
对式(4)描述的严格反馈非线性系统[18],提出一种反演控制方法,通过设计障碍Lyapunov 函数,实现对舵面转角φ 的约束,并证明系统的稳定性。
2.1 基于BLF 的反演控制器设计
反演控制将Lyapunov 函数的选取与控制器设计相结合,将非线性系统分解成若干不超过系统阶数的子系统,然后为每个子系统设计CLF 和虚拟控制量,逐层修正算法来设计镇定控制器,最终完成控制律的设计,实现全局调节和跟踪。本文在虚拟控制中引入误差的积分项,利用积分作用消除稳态误差,与常规反演控制不同之处在于选取BLF 而非二次型作为Lyapunov 函数。具体设计步骤如下:
1)设φ*为舵面期望转角,设舵面转角容许误差范围为(- kb,kb),定义跟踪误差为:,,其中、为虚拟控制量。
引入输出误差的积分,记为

对式(5)求导,有

对z1求导,并将式(4)代入,可得

选取Lyapunov 函数

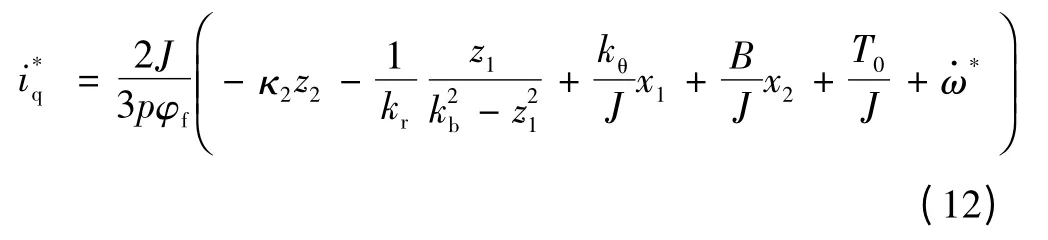
由文献[15]中BLF 定义可知,V1为BLF。取x2的虚拟控制量ω*为

式中κ1>0 为待设计的参数,对式(8)求导,得

2)由于x2并非受约束项,故而可选择二次型Lyapunov 函数作为候选函数

式中κ2>0,对式(11)求导,得
3)选择二次型Lyapunov 函数为

对式(14)求导,得
选取实际uq为
式中κ3>0,则式(15)可化简为

4)为实现电流和速度的解耦,使转矩不受磁通电流的影响,需采用i*d=0 的控制策略。选择二次型Lyapunov 函数为

对式(18)求导,得
选取实际ud为

式中κ4>0。至此完成控制律设计。PMSM 伺服作动系统反演控制结构如图1所示。

图1 PMSM 伺服作动系统约束反演控制Fig.1 Backstepping-based constraint control for PMSM Servo-Actuation System
2.2 系统稳定性证明
定理:对式(4)所示伺服作动系统,采用式(16)、式(20)反馈控制律,若舵面转角期望指令连续且三阶可导,并满足(χ1为一正数),且初始条件},则以下结论成立。
1)误差信号zi(t)保持在紧集Ωz内。

2)输出信号y(t)保持在紧集Ωy内,且严格有界。

3)所有闭环信号皆有界。
4)系统输出误差z1(t)渐近收敛到零,当t →∞,y(t)→φ*(t)。
证明:1)将式(20)代入式(19),得

由于κi<0(i=1,…,4),可知,由此可知V4(t)≤V4(0),若z1(0)∈(- kb,kb),根据文献[15]中引理1 可知,z1∈(- kb,kb)∀t ∈[0,∞)。由式(8)可知

3)由z1(t)有界结合由式(9)可知虚拟控制量ω*有界,依此类推可知zi(t)有界,结合设计过程可知控制律uq和ud亦有界,由此可得系统闭环信号皆有界。
4)由zi(t)有界,可计算出亦有界,对式(23)求导可知有界,为一致连续,由Barbalat 引理可知,当t →∞时,→0,即zi(t)→0,可实现对舵面位置的精确跟踪。
3 仿真结果及分析
在Matlab 环境下进行数值仿真,验证本文所设计控制器的有效性。仿真参数如表1 所示。
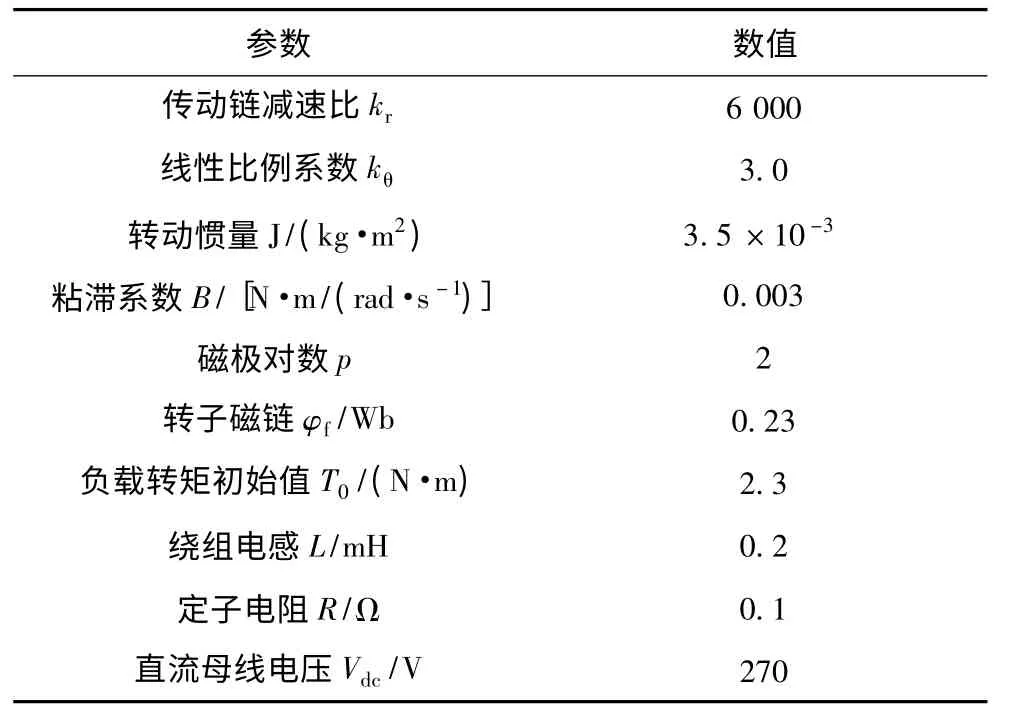
表1 伺服作动系统参数Tab.1 Parameters of servo-actuation system
舵面运动通常是绕伺服系统的输出轴作往复摆动,可近似为正弦运动,满足定理中假设条件,设置舵面转角期望指令为,结合工程实际,设计kb为1.5,即舵面偏角容许误差范围z1∈(-1.5,1.5),控制器参数设置为κ1=κ2=3 000,κ3=κ4=500,λ=2 000。
采用本文方法控制效果如图2所示,可看出舵面位置具有较高的控制准确度,未有产生较大的超调量,z1(t)始终被约束在设定范围内,且收敛较快速,电动机实时转速较准确的逼近虚拟控制量ω*。
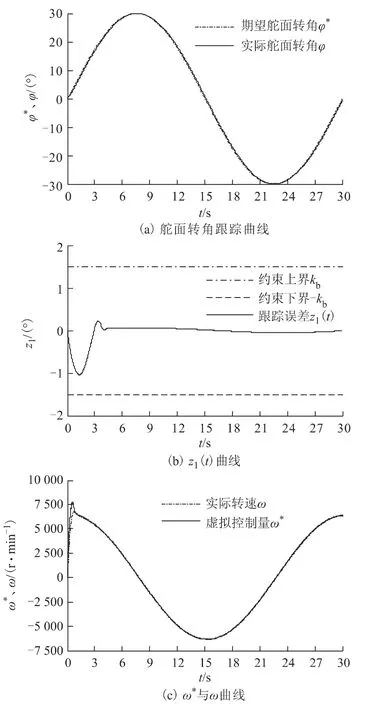
图2 本文方法控制结果Fig.2 Simulation results of proposed method
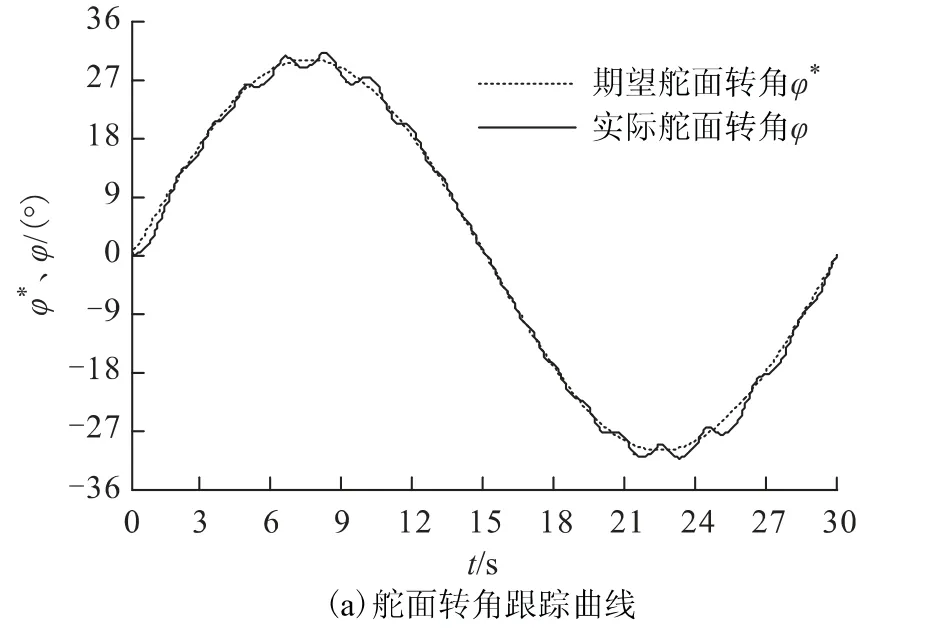

图3 常规反演方法控制结果Fig.3 Simulation results of classical backstepping method
由图3可知,常规反演控制仍能保证系统稳定性,但对系统动态性能的调节仅依赖于控制器参数的整定,对误差约束条件是无法处理的。
4 实验结果
为验证机载PMSM 伺服作动系统及控制器性能,建立实验平台如图4所示。

图4 伺服系统实验平台Fig.4 Servo-actuation system experimental platform
作动机构采用并行/主动式双余度结构,为测试PMSM 性能,实验中采用单通道控制。负载模拟器是舵面负载力矩的加载装置,能模拟随马赫数、攻角及舵偏角等参数变化的舵面负载力矩。伺服控制器采用TI TMS320F2812,逆变单元采用IGBT 组成全桥结构,通过光电编码器进行速度测量。
为验证积分反馈的作用,设计不含积分反馈的约束反演控制器。控制器设计中选择对数型BLF,V1=其余步骤与上文相同,控制器参数同仿真验证。实验结果如图5所示。
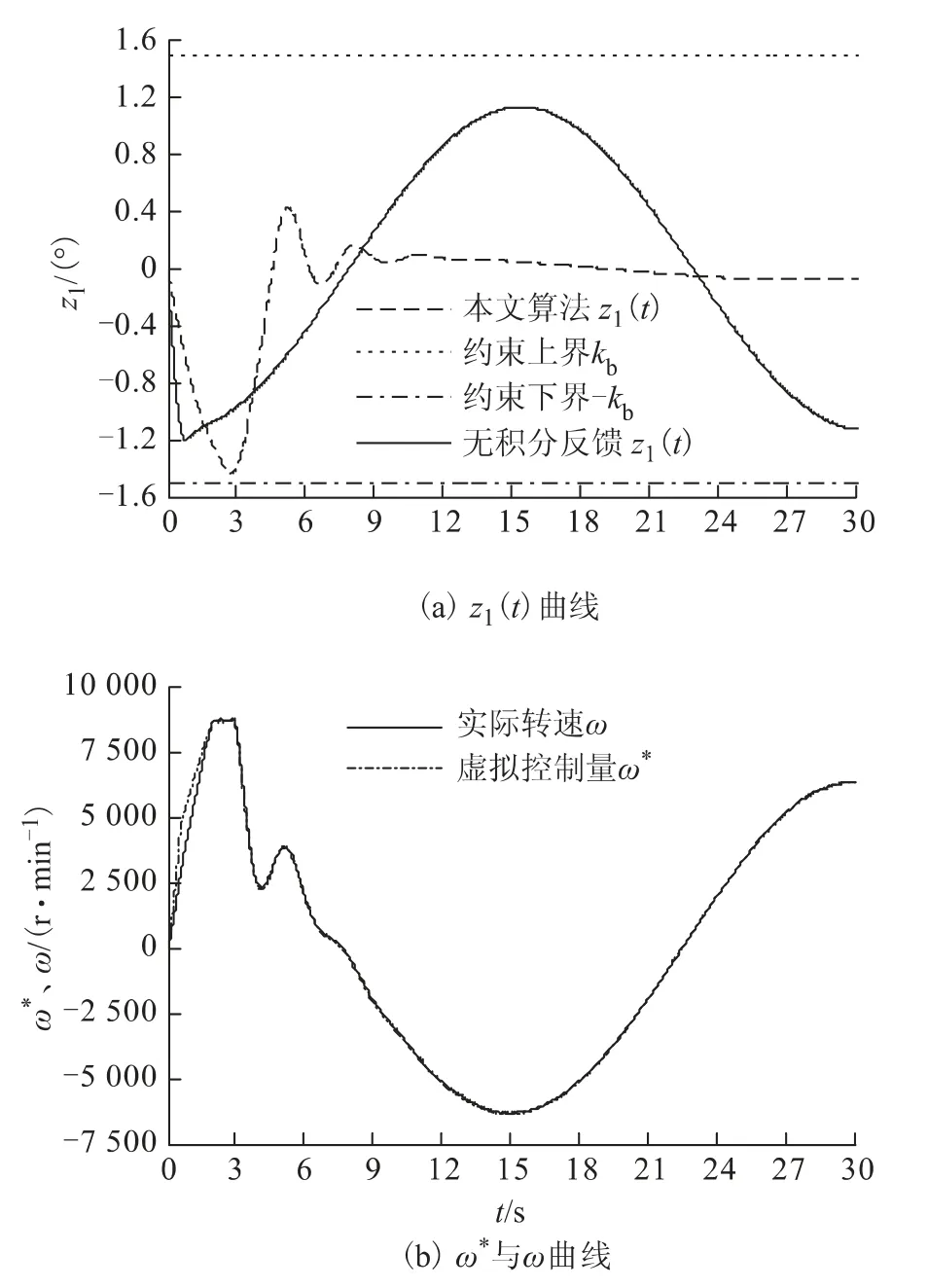
图5 本文方法实验结果Fig.5 Experimental results of proposed method
通过图5a 舵面转角误差对比结果可看出积分反馈的作用,由于作动系统中存在参数时变特性及未建模动态,积分项的引入显著提高了舵面位置跟踪精度,加快了误差信号zi(t)的收敛速度。
对比图5a 与图3b 可知,与仿真结果相比,实验结果的最大误差和误差绝对值积分显著偏大,主要考虑以下原因:数学模型中忽略了实际作动系统的非线性特性,如电动机发热导致的模型参数变化,负载模拟器存在多余力矩,舵面存在机械连接间隙非线性、摩擦非线性、同轴度误差等。由图5b 可知电动机转速能准确快速地跟踪参考转速信号。实验结果表明本文算法具有较好的鲁棒性,可保证系统的全局渐近稳定性,且可保证对超调量的有效约束。
5 结论
针对机载PMSM 伺服作动系统存在的强耦合非线性特性以及高精度控制需求,提出一种基于障碍Lyapunov 函数的积分反演控制策略,实现对输出误差的约束,证明了控制算法的收敛性,并研究了障碍Lyapunov 函数及积分项在反演控制中的作用。可得如下结论:
1)传统反演方法仅能保证PMSM 伺服作动系统稳定性,无法解决对误差量的约束问题。
2)本文方法不仅可实现伺服控制的全局渐进稳定,而且可实现对输出误差量的实时约束,通过理论证明与仿真对比可知,本文方法弥补了传统反演控制方法的不足,实现了机载伺服系统的高精度控制。
3)反演设计中引入积分项,一定程度上增强了系统的鲁棒性,对改善稳态控制品质有积极意义。
4)递推设计环节中可考虑采用有限时间滑模控制方法设计虚拟控制量,加快收敛速度,增强系统鲁棒性。
[1] 罗战强,梁得亮.双余度机电作动伺服系统数学模型与特性[J].电工技术学报,2014,29(1):165-173.
Luo Zhanqiang,Liang Deliang.Mathematical model and characteristics on dual-redundancy electromechanical actuation servo system[J].Transactions of China Electrotechnical Society,2014,29(1):165-173.
[2] 张巍,尚晓磊,周元钧,等.一种适用于航空电力作动器负载的三相PWM 整流器最大功率控制[J].电工技术学报,2011,26(8):91-98.
Zhang Wei,Shang Xiaolei,Zhou Yuanjun,et al.A maximum power control method of three-phase voltage source rectifiers adapted to aircraft electric actuator load[J].Transactions of China Electrotechnical Society,2011,26(8):91-98.
[3] 黄庆,黄守道,伍倩倩,等.基于模糊自抗扰控制器的永磁同步电动机伺服系统[J].电工技术学报,2013,28(9):294-301.
Huang Qing,Huang Shoudao,Wu Qianqian,et al.PMSM servo system based on fuzzy active-disturbance rejection controller[J].Transactions of China Electrotechnical Society,2013,28(9):294-301.
[4] Luo Y,Chen Y Q,Ahn H S,et al.Fractional order robust control for cogging effect compensation in PMSM position servo systems:stability analysis and experiments[J].Control Engineering Practice,2010,18(9):1022-1036.
[5] Kumar V,Gaur P,Mittal A P.ANN based self tuned PID like adaptive controller design for high performance PMSM position control[J].Expert Systems with Applications,2014,41(7):7995-8002.
[6] Qi Liang,Shi Hongbo.Adaptive position tracking control of permanent magnet synchronous motor based on RBF fast terminal sliding mode control[J].Neurocomputing,2013,115(4):23-30.
[7] Ghafari-Kashani A R,Faiz J,Yazdanpanah M J.Integration of non-linear H∞and sliding mode control techniques for motion control of a permanent magnet synchronous motor[J].IET Electric Power Applications,2010,4(4):267-280.
[8] Cauet S,Coirault P,Njeh M.Diesel engine torque ripple reduction through LPV control in hybrid electric vehicle powertrain:experimental results[J].Control Engineering Practice,2013,21(12):1830-1840.
[9] Krstic M,Kanellakopoulos I,Kokotovic P V.Nonlinear and Adaptive Control Design[M].New York:John Wiley& Sons,1995.
[10] 付培华,陈振,丛炳龙,等.基于反步自适应滑模控制的永磁同步电机位置伺服系统[J].电工技术学报,2013,28(9):288-293.
Fu Peihua,Chen Zhen,Cong Binglong,et al.A position servo system of permanent magnet synchronous motor based on back-stepping adaptive sliding mode control[J].Transactions of China Electrotechnical Society,2013,28(9):288-293.
[11] Hamida Mohamed Assaad,Glumineau Alain,Leon de Jesus.Robust integral backstepping control for sensorless IPM synchronous motor controller[J].Journal of the Franklin Institute,2012,349(5):1734-1757.
[12] Morawiec M.The adaptive backstepping control of permanent magnet synchronous motor supplied by current source inverter[J].IEEE Transactions on Industrial Informatics,2013,9(2):1047-1055.
[13] Karabacak M,Eskikurt H I.Speed and current regulation of a permanent magnet synchronous motor via nonlinear and adaptive backstepping control[J].Mathematical and Computer Modelling,2011,53(9):2015-2030.
[14] Ngo K B,Mahony R E,Jiang Z P.Integrator backstepping using barrier functions for systems with multiple state constraints[C].44th IEEE Conference on Decision & Control,Seville,Spain,2005:8306-8312.
[15] Tee K P,Ge S S,Tay E H.Barrier Lyapunov Functions for the control of output-constrained nonlinear systems[J].Automatica,2009,45(4):918-927.
[16] Alain Glumineau,de Leon Morales Morales.Sensorless AC Electric Motor Control-Robust Advanced Design Techniques and Applications[M].Berlin:Springer,2015.
[17] 许叙遥,林辉.基于动态滑模控制的永磁同步电机位置速度一体化设计[J].电工技术学报,2014,29(5):77-83.
Xu Xuyao,Lin Hui.Integrated design for permanent magnet synchronous motor servo systems based on dynamic sliding mode control[J].Transactions of China Electrotechnical Society,2014,29(5):77-83.
[18] Tong Shaocheng,Liu Changliang,Li Yongming.Adaptive fuzzy backstepping output feedback control for strict feedback nonlinear systems with unknown sign of high-frequency gain[J].Neurocomputing,2012,77(1):58-70.
猜你喜欢
贵州大学学报(自然科学版)(2022年6期)2022-12-26
装备环境工程(2022年9期)2022-10-13
南宁师范大学学报(自然科学版)(2022年1期)2022-05-10
兵器装备工程学报(2021年12期)2022-01-11
铁道通信信号(2020年11期)2020-02-07
汽车与新动力(2019年5期)2019-11-07
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
铁道通信信号(2019年1期)2019-03-21
信阳师范学院学报(自然科学版)(2018年1期)2018-08-09