声学地层剖面深水探测研究与开发
2015-06-24 14:11:11丁维凤李家彪苏希华张济博蒋维杰韩富江
海洋学报 2015年6期
丁维凤,李家彪,苏希华,张济博,蒋维杰,韩富江
(1.中国海洋大学,山东 青岛 266100;2.国家海洋局 第二海洋研究所 工程海洋学重点实验室,浙江 杭州 310012;3.上海地海仪器有限公司,上海 201612)
声学地层剖面深水探测研究与开发
丁维凤1,2,李家彪2,苏希华3,张济博2,蒋维杰2,韩富江2
(1.中国海洋大学,山东 青岛 266100;2.国家海洋局 第二海洋研究所 工程海洋学重点实验室,浙江 杭州 310012;3.上海地海仪器有限公司,上海 201612)
深水浅部地层精细探测是深海地质勘探与资源开发的重要调查内容。与浅水海域声学地层剖面探测相比,深水地层剖面探测会遇到严重的能量衰减、大数据量长时间反射序列采样、纵向地层分辨率降低以及横向空间覆盖率偏稀等问题,为解决这些问题,国外仪器商采用了不同的方法。采取重采样减少数据量会严重影响纵向分辨率;采取MultiPing技术可以很好解决横向空间覆盖率问题,但多Ping接收采用海底追踪变深度范围采集会造成反射同相轴跳跃突变,或采用短时间间隔采集会造成回波数据无法准确计算海底深度。为了解决这些技术问题,作者研究开发了相关的技术处理方法,解决MultiPing技术反射同相轴拼接改正处理和海底深度记录延迟处理,这些问题的解决为深水浅部地层精细探测提供了技术保障。
声学地层剖面;深水探测;MultiPing技术
1 引言
建设海洋强国,维护海洋权益,必须发展深海技术;进军深海领域,开发深海资源,必须勘探深海海底。深海地质勘探与资源开发不仅要了解海底深部地质构造,更需摸清深海海底浅部地层结构形态、沉积类型与灾害地质等,高分辨率声学地层剖面探测是实现深水海底浅部地层精细勘探的可靠技术。采用Chirp技术的声学地层剖面仪自20世纪80年代引入海洋地质调查以来[1],浅水海域(水深在300 m以内)中的声学地层剖面探测在海洋地质调查中广泛应用,获得了大量高质量的浅部地层剖面数据。但在水深超过2 000 m的深水海域,受仪器设备和技术方法的限制,声学地层剖面探测应用受局限,高质量的深水浅部地层剖面数据难以获得。
目前国际上能够探测超过6 000 m水深的声学地层剖面软硬件设备比较有限,主要软硬件设备见表1所列。国外公司销售的这些软硬件设备在实际应用中各有优点,但也暴露出各自的缺陷,在深水(水深超过2 000 m)MultiPing(Multiple Pings)功能上,EdgeTech公司的控制参数过于复杂,Benthos公司的ChirpⅢ硬件有该功能但还没有支持软件,SonarWiz软件只能控制单个Ping,且深水单Ping采用了重采样减少数据量的方法,SyQuest公司通过海底追踪切除部分水体数据来接收MultiPing数据,追踪不准会接收错误数据体,参量阵设备也是通过避开接收水体中信号,只记录来自深水海底的有效反射回波。

表1 国外几款主要的深水地层剖面探测设备
深水海底地层探测相对于浅水地层探测,主要问题突出在有效反射数据体的接收以及横向空间分辨率的提高等技术上。为实现深水海底浅部地层的高分辨率与横向高覆盖率的探测,我们以国外销售的几款主要商业软硬件在应用中出现的问题为参考,探讨声学地层剖面深水探测实际工作中遇到的主要技术问题,研究解决这些问题的技术方法,并在自主研发的基础上实现深水MultiPing功能的控制与开发。
2 深水地层探测主要问题
2.1 能量衰减
声学换能器发射的声波在深海水体中传播时,会发生球面扩散、介质吸收、透射损失等,其传播能量会严重损失。浅水海域中使用的由4个换能器组合而成的舷挂式或拖曳式声学剖面仪,如图1所示,用于深海地层探测,因发射的声波信号能量有限,大部分能量会被吸收衰减,造成有效反射信号能量非常微弱,淹没于环境噪音中而无法识别。为弥补深水探测有效信号强吸收衰减的缺陷,仪器制造商通过增加换能器组合数来提高发射声波的能量,目前国外仪器商采用16个或更多换能器组合成一个大的发射基阵,并固定安装于船底,如图2所示,换能器基阵发射大能量的声波脉冲实现深水地层的精细探测已被应用。

图1 美国Benthos公司ChirpⅢ系统舷挂式安装的4个换能器组合Fig.1 The assemble of 4 transducers installed by means of board-hanging in ChirpⅢ system(Benthos Inc,USA)

图2 美国EdgeTech公司3300系列安装于船底的5×5换能器组合阵Fig.2 The assemble of 5×5 array of transducers installed on ship’s bottom in serie no. 3300 system (EdgeTech Inc.,USA)
2.2 横向空间分辨率
深水地层剖面探测采用单Ping发射的时间间隔太大,以6 000 m水深为例,声波在海水中来去双程传播要花费8 s左右的时间,若调查船以稳定的4节速度航行,8 s发射间隔,海底反射点间的横向间距有16.5 m,实际勘探船速往往会超过4节,这给回波数据带来了过大的横向空间间隔,水平覆盖率太低,造成声波反射同相轴能量弱,横向连续性差,目标探测精度不够。降低现场勘探船速会提高水平覆盖率,但最慢的2节速度也会有9 m左右的空间横向间隔,再提高就很难。
2.3 纵向地层分辨率
线性调频(FM)宽频带Chirp子波技术理论上可以分辨出非常薄的地层反射信号,能够分辨出20 cm以内的薄互层反射,但在深水勘探中,反射信号在深水水体中传播需要较长时间,接收到的反射信号序列非常长。以2 000 m水深的4 s记录长度为例,按32 us采样,其反射记录样点序列达125 000个,用标准的SEG-Y格式无法存储,国际标准SEG-Y格式只能存储32 767个(215-1)样点序列[9]。为了解决存储问题,美国Chesapeake公司的SonarWiz软件以124 ms的采样率重新采样回波数据,减少回波振幅样点数(重采样后减为32 258),确保能够写入SEG-Y格式文件中。但重采样会减低声学反射数据的纵向分辨率,水深越深,重采样率数值越大,微细地层反射同相轴的分辨力也变得更差。如图3所示,3 460 m以下水深的反射剖面上,重采样后剖面反射同相轴明显变模糊,同相轴间的分界不明显,反射层理不清晰,反射形态模糊。

图3 SonarWiz软件采集的深水数据经重采样后的SEG-Y文件剖面显示Fig.3 Profile of SEG-Y file after re-sampled data for the deep ocean collected by SonarWiz software
2.4 反射同相轴突跳
为满足标准SEG-Y格式的存储要求,采取重采样减少深水反射数据体的方法对纵向分辨率影响比较大,为避免该缺陷,SyQuest公司的Bathy2010系统和Kongsberg公司的TOPAS等参量阵系统都采用追踪海底深度,采集海底附近部分范围内的短时间样点序列,且采集范围会随水深变化自动选择,如图4a与4b所示。避开长时间反射序列,只记录部分短时间有效反射信号,必须先追踪海底反射,现场采集时若能连续正确追踪海底反射,该方法可以有效避开深水超长样点序列的采集,只记录部分有效反射信号,解决了深水数据量大的问题。但海底追踪很容易受干扰信号的影响,追踪不准,会采集错误的反射数据体,如图5,图中在深度范围改变时的两处空白数据体位置,因水深变化海底追踪不准,造成系统选择的采集深度范围出错,并记录无效的数据,该问题后续处理无法纠正。另外,在海底地形连续变化时,海底追踪变深度范围采集会使连续反射同相轴跳跃突变,造成反射同相轴突然中段,反射形态不对,严重影响资料的后续处理与解释,如图4b和图5,针对此类数据还需作专门的同相轴拼接处理,正确拼接后才能使用。

图4 海底追踪变深度范围采集窗口选择示意和采集后的数据剖面Fig.4 The selection of acquisition window for variable depth range during sea bed tracking and profile for data after variable depth range acquisition
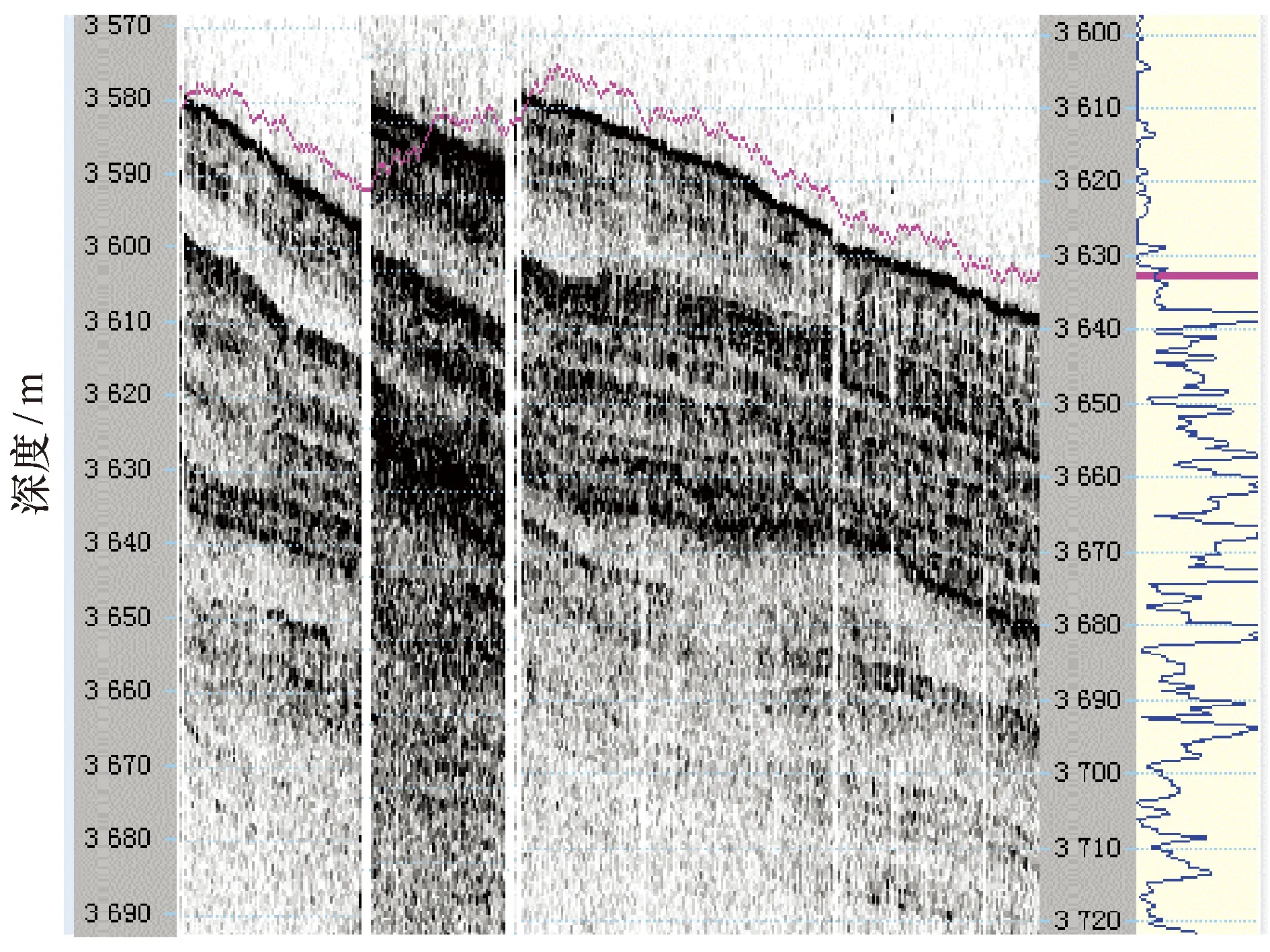
图5 Bathy2010系统变深度范围采集短时间序列的数据剖面Fig.5 Data profile of short time series acquisition with variable depth range by Bathy2010 system
3 深水地层探测MultiPing功能
3.1 MultiPing功能原理
深水声学地层剖面探测不仅会遇到能量严重衰减的问题,还会遇到大数据量和横向空间分辨率差的问题。能量衰减可以通过增加声学换能器组合数来解决,但横向覆盖率和大数据量问题采用传统的采集方法无法解决。在不影响工作效率的情况下,为解决数据量与横向空间覆盖率问题,国外仪器商开展了大量的试验研究,并开发了专门针对深水海域地层剖面高分辨率声学探测的MultiPing技术采集方法。

图6 深水地层MultiPing功能探测示意图Fig.6 Sketch map for MultiPing surveying in deep ocean
MultiPing技术,就是在深水探测过程中,声学换能器阵短时间内(如1 s)连续向水体发射多个声学脉冲,保证深水水体横向短距离内有连续的多个声学脉冲信号在传播,如图6所示。换能器阵发射的同时实时监控回波信息并采集,采集间隔等同于发射间隔(如1 s),勘探船若以4节船速航行,当每秒都能采集到有效反射信号时,反射剖面上就能获得横向空间只有2 m左右间隔的反射波,若采集间隔小于1 s(发射间隔同样小于1 s),获得的反射信号横向空间分辨率将更高,这充分保证了横向空间上的高覆盖,使纵横两方向都实现高分辨率探测的目的。
3.2 MultiPing数据改正
MultiPing功能实际探测过程中,如何正确识别有效反射信息特别是回波信号的时间或深度信息是MultiPing深水探测技术的关键。前面已提到SyQuest公司采用追踪海底反射,采集海底面附近有限深度范围内的反射回波方法,该方法能有效避免大数据量采集,同时通过MultiPing技术解决了横向空间分辨率的问题,但该方法在海底深度变化时会产生反射同相轴突跳现象,如图5所示,为了解决该问题,后续需做专门的信号拼接改正处理,否则反射剖面无法解释。改正方法需要利用多道地震勘探中野外一次静校正方法原理,处理时先搜寻写入SEG-Y数据体中各反射回波开始记录的起始时间(记录延迟时间),找出最小起始记录时间tmin,然后将其余回波的开始记录时间与其相减,并将结果转换为离散采样点数,最后将整个道(Ping)数据按改正量作向后整体“搬家”,简单计算公式如下:
(1)
通过搜寻最小起始记录时间,公式(1)中的时差改正量均为正,改正时记录整体向深度变深方向“搬家”,防止海底及以下地层反射同相轴被搬到采集深度范围以外而无法显示。采用上面思路,对图5由SyQuest公司Bathy2010系统现场采集存储的SEG-Y数据进行改正处理,改正结果如图7所示,改正后海底及以下地层的反射同相轴连续性变好,反射形态完整,剖面上的两处空白是因现场采集时实时海底追踪不准造成采集数据体不对,稍大空白还造成处理时海底追踪不准,接收数据体正常后追踪能正确归位。

图7 对图5数据进行时移改正后显示的正确剖面Fig.7 Revised profile from Fig.5 by delay time correction
3.3 MultiPing记录延迟计算
MultiPing技术向深水水体连续发射了许多大能量声波脉冲,对应就会有连续从海底地层反射回来的回波,以美国Benthos公司生产的ChirpⅢ系统为例,其声学换能器阵按发射间隔连续采集回波数据,采集的回波长度等于发射间隔,如1 s的间隔发射,其采集回波长度也为1 s。但该系统无法确认接收的反射回波是何时发射出去的,也就无法确认回波在水体和地层中传播了多长时间,因此所接收的反射回波实际长度不能确认,系统只能将采集到的1 s长回波起始记录时间设置为0,对应的起始深度也为0,这就造成反射剖面上显示的海底反射同相轴深度与实际海底明显不一致,如图8所示。为了解决该问题,ChirpⅢ采集系统需要人工输入深度参考值,该参考值可以为实际水深,也可以为回波上追踪到的海底深度与实际深度之差值,定为初始深度。
输入实际水深计算接收回波的起始深度方法,主要利用反射波双程传播时间与实际接收回波长度的倍数关系来换算,计算公式如下:
(2)
式中,H为从反射剖面上计算获得的海底深度,该深度由反射回波实时海底追踪深度h追踪与计算获得的起始采集深度h起始相加得到,N表示人工输入的实际水深h实际是剖面仪采集到的回波长度L记录的多少整数倍,即实际深水水体中有多少个与剖面仪记录回波长度相等的信号,再将其与记录长度L记录相乘就得到起始记录深度h起始,进一步转换成记录延迟时间t延迟,并将该值随回波信号实时写入SEG-Y数据体中,后续回放和处理解释时就可以利用该延迟时间正确显示海底深度。
输入初始水深需要人工换算起始采集深度,方法是将测深仪上显示的海底深度与接收回波上追踪的海底深度两者相减,将差值作为起始采集深度输入到采集系统,采集系统利用该值就可以计算出延迟记录时间,并写入SEG-Y数据体中。
按照上面思路,输入测深仪上显示的海底深度值或人工直接计算的起始记录深度值到自主研发的ChirpⅢ采集系统中,输入后系统显示的正确深度范围如图9所示,图中的剖面数据经过了涌浪改正处理及海底追踪分段TVG处理。
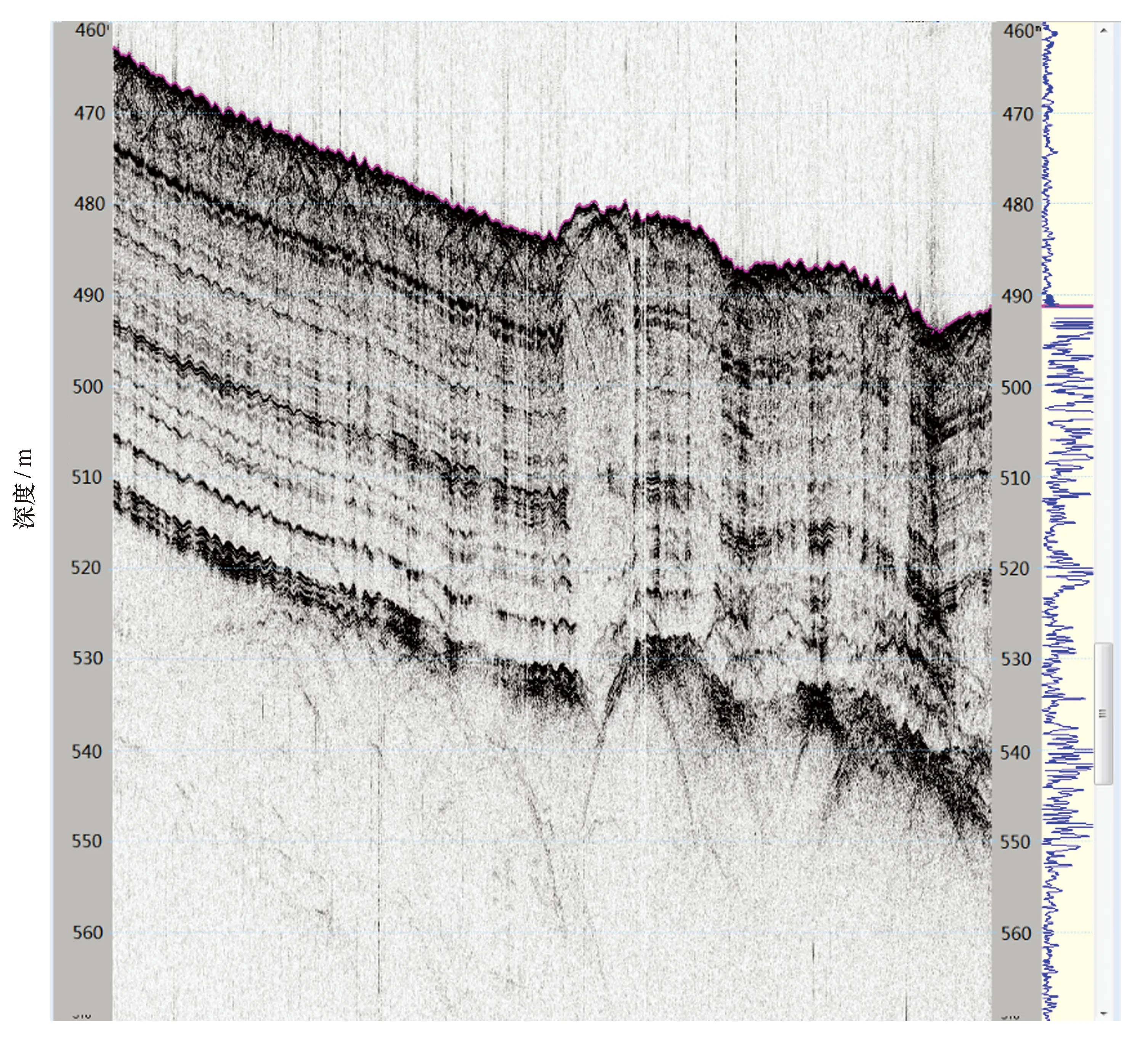
图8 美国Benthos公司ChirpⅢ系统采集的深水MultiPing原始剖面Fig.8 The original profile drawn by raw data collected by MultiPing survey with ChirpⅢ system (Benthos Inc.,USA)
4 总结
声学地层剖面深水精细地层探测不仅要解决纵向地层分辨率的问题,还要解决横向空间覆盖率的问题。深水地层探测反射时间序列都很长,采用单Ping重采样技术不仅会降低剖面纵向分辨率,还无法满足横向空间高覆盖的要求,此时需要采用深水MultiPing技术。为了解决深水长反射序列信号,MultiPing技术都只记录海底反射信号附近的短时间反射序列信号,因此海底追踪变深度范围采集或按发射间隔短时间采集是两种主要采集方法,海底追踪变深度范围采集会带来反射同相轴中断突跳问题,需要作专门的同相轴拼接改正处理,按发射间隔短时间采集会带来错误的海底深度问题,此时需要利用参考水深值并实时计算记录延迟,两类问题都在自主研发的采集系统中圆满解决。

图9 经采集延迟深度改正与涌浪改正处理后的图8剖面显示Fig.9 Revised profile from Fig.8 by time delay and swell correction
[1] 丁维凤,冯霞,来向华,等. Chirp技术及其在海底浅层勘探中的应用[J]. 海洋技术,2006,25(2):10-13.
Ding Weifeng,Feng Xia,Lai Xianghua,et al. The Chirp technology and its application in the ocean sub-bottom exploration[J]. Sea Technology,2006,25(2):10-13.
[2] EdgeTech Incorporation. 3300: Hull Mount Sub-Bottom Profiler[OL]. USA,2005.http://www.edgetech.com/edgetech/gallery/category/sub-bottom-profiling-systems(2014-06-30)
[3] Benthos Incorporation. CAP-6600 Chirp II Acoustic Profiling System Manual[OL]. USA,1996.http://www.benthos.com/_doc/main/Brochures_Datasheets/elp362D 001815 rev_L.pdf(2014-06-30)
[4] ChesaPeake Technology Inc. SonarWiz.MAP User’s Guide[OL]. USA,2007. http://chesapeaketech.com/docs/CTI-SBP-Datasheet.pdf(2014-06-30)
[5] SyQwest Incorporation. Bathy 2010TMCHIRP Sub Bottom Profiler and Bathymetric Echo Sounder[OL]. USA,2011.Http://www.syqwestinc.com/application/sub bottom profiling survey(2014-06-30)
[6] 吴水根,周建平,顾春华,等. 全海洋浅地层剖面仪及其应用[J]. 海洋学研究,2007,25(2):91-96.
Wu Shuigen,Zhou Jianping,Gu Chunhua,et al. The deep sea sub-bottom profile and its application[J]. Journal of marine sciences,2007,25(2):91-96.
[7] Oleg Levchenko,Ivar Murdmaa,Elena Ivanova,et al. Correlation of VHR seismic refection profiles SES-2000 deep with sediment cores-a valid approach to study deep sea sediments structure and origin of internal reflectors[R]. 5th Workshop “Seabed Acoustics”,Rostock,November 17/18,2011.
[8] ATLAS Hydrographic Incorporation. ATALAS PARASOUND Deep-sea parametric sub-bottom profiler[OL]. Germany,2010. http://www.atlas-elektronik.com/fileadmin/user_ upload/images/products/001_PDF/ATLAS_PARASOUND.pdf(2014-06-30)
[9] 丁维凤,苏希华,蒋维杰,等. 声学地层剖面野外数据采集几个关键问题的解决[J]. 海洋学报,2014,36(1):119-125.
Ding Weifeng,Su Xihua,Jiang Weijie,et al. Solving of several foreign commercial softwares’s bug in sub-bottom profile acquisition[J]. Haiyang Xuebao,2014,36(1):119-125.
Technology research and development for acoustic subbottom survey in deep sea
Ding Weifeng1,2,Li Jiabiao2,Su Xihua3,Zhang Jibo2,Jiang Weijie2,Han Fujiang2
(1.OceanUniversityofChina,Qingdao266100,China; 2.TheSecondInstituteofOceanography,StateOceanicAdministration,Hangzhou310012,China; 3.GeoMarineTechnologyCo.Ltd,Shanghai201612,China)
Detailed survey of acoustic subbottom is important for deep ocean geological exploration and resource exploitation. Compared to survey in shallow ocean water,deep sea survey faced some serious problems such as energy strongly attenuation,long reflection time series and large digital data size,the vertical stratigraphic resolution reduction,and low transverse space coverage. In order to resolving these problems,main instrument manufactures in the world adopted different possible methods. For example,resampling long reflection time series can decrease the data size,but it strongly reduce vertical stratigraphic resolution. Taking MultiPing technology can solve the transverse space coverage well,but its variable depth range acquisition by seafloor reflection tracking will cause serious jumping off in reflection events,or it cannot get the correct seafloor reflection depth by acquisition with MultiPing transmitting interval. This study further independently developed some related technologies,and correctly solved the reflection events’ jumping off,and got the recording time delay in computing the deep seafloor depth. All these technologies obtained in the present study will provide some technical support for future acoustic subbottom detailed survey in deep sea.
acoustic subbottom; survey in deep sea; MultiPing technology
10.3969/j.issn.0253-4193.2015.06.007
2014-06-30;
2015-01-19。
2014年度南极周边海域海洋地球物理考察(CHINARE2014-01-03);2013年度南极环境综合分析与评价(CHINARE2013-04-01);国家海洋局第二海洋研究所基本科研业务费专项资助项目(JT1004,JG1201)。
丁维凤(1978—),男,江西省德安县人,教授级高工,主要从事海洋地球物理勘探与研究工作。E-mail:fwxf1769@126.com
P631.4;P714.8
A
0253-4193(2015)06-0070-08
丁维凤,李家彪,苏希华,等. 声学地层剖面深水探测研究与开发[J].海洋学报,2015,37(6):70-77,
Ding Weifeng,Li Jiabiao,Su Xihua,et al.Technology research and development for acoustic subbottom survey in deep sea[J]. Haiyang Xuebao,2015,37(6):70-77,doi:10.3969/j.issn.0253-4193.2015.06.007
猜你喜欢
家庭影院技术(2020年6期)2020-07-27 01:37:54
石油地球物理勘探(2019年6期)2019-12-05 07:25:38
当代陕西(2019年8期)2019-05-09 02:23:00
家庭影院技术(2019年1期)2019-01-21 02:25:04
家庭影院技术(2018年11期)2019-01-21 02:20:50
家庭影院技术(2018年10期)2018-11-02 05:35:26
环球市场信息导报(2016年19期)2017-10-09 15:03:09
中国科技信息(2016年11期)2016-09-22 09:30:32
中国卫生(2015年8期)2015-11-12 13:15:16
水道港口(2013年2期)2013-04-27 14:14:16