
一种用于变电站运维现场的 三维定位优化方法
2015-06-24 08:13黄薛凌
电气技术与经济 2015年3期
王 刚 马 娜 徐 强 姜 华 黄薛凌 诸 军
(1. 国家电网无锡供电公司 2. 中国科学院上海高等研究院)
0 引言
随着电子技术与通信技术的发展,人们对室内定位的需求与日俱增,如仓库、医院、监狱、商场等场所都需要有高精度的定位信息。同时室内环境与室外环境的差异,使得一些优秀的室外定位算法和系统无法应用在室内环境,如手机GPS的定位精度可达几米到几十米,在室外环境下可以很好地满足应用需求,但是在室内环境下却无法应用。室内定位的特殊性体现在以下几方面:
1)高定位精度要求。在变电站内,运维操作人员可活动的空间范围是有限的,快速进行近电报警尤为重要,这就要求定位系统的精度在分米级以下。在进入变电站内,运维操作人员是不断移动的,因此定位系统应该能对移动目标提供跟静止目标差不多的定位精度。
2)支持多目标跟踪。在运维操作中,任何拿到操作票的操作人员均可进入变电站内,形成一个多人协作的空间,其定位系统应该能跟踪多个对象,准确地区分其ID。
3)方向性要求。在室内,被人携带的定位单元往往会随着人们的日常活动而不定地改变朝向,当定位单元的朝向改变的情况下,不应该中断或丢失其位置信息或产生较大的偏差。因此定位系统应该能对方向的改变有一定的免疫力。
4)具有便携性。定位单元需要安装在安全帽上,因此需要装置小巧、轻便,便于嵌入到安全帽中。
1 室内定位
1.1 定位系统
目前,国内外提出了许多定位技术解决方案,如红外线定位技术、超声波定位技术、RFID定位技术、蓝牙技术、UWB定位技术、计算机视觉技术以及WSN定位技术等。这些定位技术都有各自的适用环境以及优缺点,具体优缺点的对比如表1所示。
通过表中各定位技术的定位精度和优缺点对比,本文利用无线传感器网络技术实现运维人员的精确定位和监控系统,并实现三维动态显示,进而加强智能变电站内的安全管理。
1.2 定位算法
目前,有两类传感器节点定位算法:基于测量距离的定位算法(Range-Based)、与测量距离无关的定位算法(Range-Free)。基于距离的定位算法首先使用测距技术测量相邻节点间的实际距离或方位,然后使用三角计算、三边计算、双曲线计算、多边计算、极大似然估计、模式识别等方法进行定位。与测量距离无关的定位算法是根据网络的连通性进行网络节点间跳数来确定,并根据参考节点的已经位置等信息估计每一跳的距离,进而估计节点在网络中所在的位置,主要包括APIT算法、质心算法、DV-Hop算法、Amorphous算法。

表1 室内定位技术对比
与测量距离无关的定位算法复杂,能耗高,在定位过程中容易导致节点过早死亡。基于测量距离的定位技术主要有:测量无线信号的到达时间(TOA)、测量无线电信号强度(RSSI)、测量声波与无线电到达的时间差(TDOA)、测量无线信号到达角度(AOA)。其中AOA的角度信息是需要通过天线波束赋形来实现,算法复杂度高;RSS对路径损耗模型的依赖性强,对具体信道环境极为敏感;TOA和TDOA都是以节点时间与世界调整时间(UTC)同步为前提的测距方法,TDOA采用硬件支持以获得更高的测距精度。
本文采用计算量小和易于实现的Chan氏定位算法,采用两步最大似然估计,具有解析表达式,是一种非递归的算法。当基站数达到4个及以上时,且TDOA距离差的误差较小时该算法给出了能达到克拉美-罗界(CRLB)的表达式解。
2 变电站站运维现场的精确定位系统
2.1 定位场景几何分布
变电站运维现场多目标精确定位系统结合了TDOA测距和精确时间同步技术,实物测试环境选取面积为10m×20m的实验室环境,实验室内中心位置摆放矩形实验台,室内空间相对空旷。实验室内布置一个无线数据传输基站,在墙壁上安装着6个定位信标节点,智能定位终端采用便携式安装在安全帽上面。定位参数是智能定位终端的三维坐标,根据双曲线定位法原理,通过已经标定位置的定位信标的数据进行计算得到。目标节点的RF收发器选择TI的CC1101芯片,采用无需申请频段许可的433MHz,通过发射功率的配置,保证在实验环境内提供射频信号的全覆盖;超声波收发器采用的是20kHz的超声。实验室的定位系统分布图如图1所示。

图1 实验室环境的定位系统分布图
2.2 室内三维定位的实现
本系统的待定位节点实际坐标为(4.5,6.8,1.1),表2所示为定位算法计算得出的三维坐标。通过表2数据可以看出,X轴和Y轴的定位精度很高,但是Z轴的定位精度偏差很大。这是由于现场施工的限制,而导致Z轴的定位结果波动性很大。本文通过对定位信标节点进行评价筛选,对Z轴的计算结果进行修订,进而得到较高的三维定位精度。
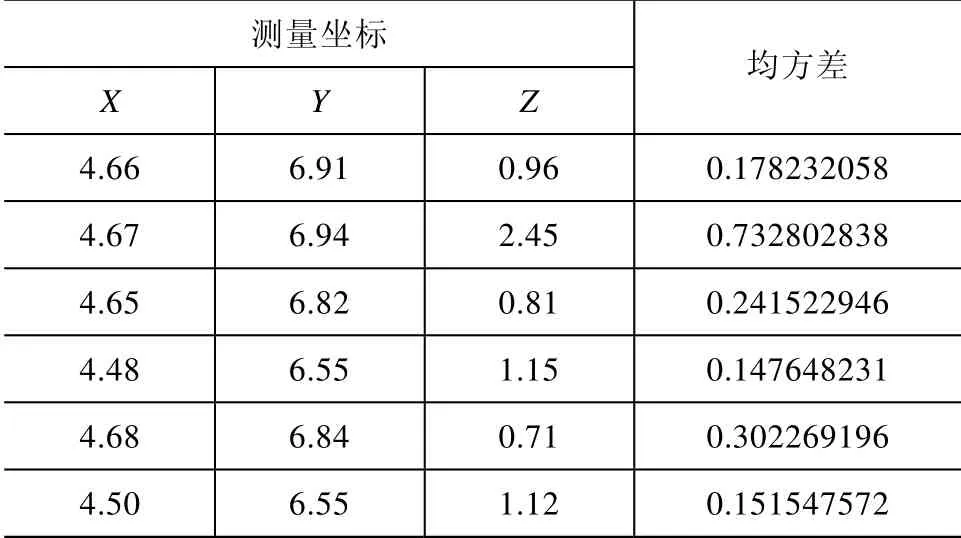
表2 Chan氏三维定位结果分析
2.2.1 定位信标节点的筛选
信号的时域瞬态过程的性能指标主要包括:延迟时间、上升时间、峰值时间等,本系统利用信号的上升时间和峰值时间的时域瞬态特性,提出了一种Z轴定位信标节点筛选算法,根据隶属度函数判断定位信标节点解码后的语音信号,选择其中信号质量最好的两个信号进行Z轴坐标的计算,进而降低了Z轴的偏移误差,提高三维定位的精度。
2.2.2 定位算法描述
变电站运维现场目标精确定位系统的定位流程图如图2所示,具体实现过程如下所述。

图2 变电运维现场的室内三维定位流程图
1)由无线数据传输基站、定位信标节点和智能定位终端组成的无线传感器网络,采用精确时间同步机制进行全网时间同步(时间同步误差在5μs之内)。
2)无线数据传输基站根据应答包,进而确认有无运维人员进入监控区域,一旦发现待定位人员进入监控区域,马上启动TDOA定位功能。
3)各定位信标节点采集待定位人员携带设备发出的超声波信号,进行TDOA三维定位运算。
定位信标Sensor 1、Sensor 2、Sensor 3和Sensor 4的坐标分别为(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),(x4,y4,z4),智能定位终端的坐标为(x,y,z);智能 定位终端到各定位信标的距离分别为d1、d2、d3、d4;有

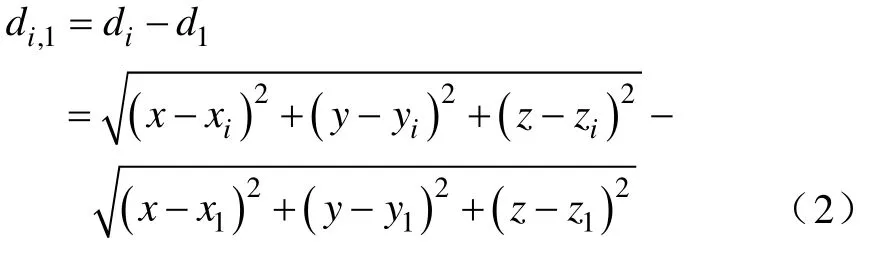
将式(1)代入式(2),整理可得

利用Chan氏定位算法进行双曲面方程组的求解,即可得到智能定位终端的初步估计位置。
4)根据超声波信号的时域特性,进行定位终端节点的数据筛选,并根据评选结果,对Z轴数据进行校正。
3 实物测试结果
在实验室的墙壁上安装6个定位信标节点,定位信标节点的坐标分别为Sensor1(5.3,0.3,1.25)、Sensor2(5.3,0.2,2.3)、Sensor3(5.96,5.24,1.75)、Sensor4(5.89,4.19,1.73)、Sensor5(0.5,8,1.85)、Sensor6(0.6,8,0.82)。将智能定位终端放置在固定位置时,进行超声定位,检测定位效果。智能定位终端的实际三维坐标是(4.2,6.6,1.2),图3为变电站运维现场目标精确定位系统计算过程图,图中红色字体表示三维坐标的X轴、Y轴和Z轴方向的数据,单位是cm。通过本系统估算出来的智能定位终端的坐标为(4.61,6.69,1.21)。表3为待定位节点放置在不同位置时的定位结果,从表中数据可以看出,经过定位信标节点的筛选后,定位结果与真实坐标的均方差明显变小,即定位精度明显提高。

图3 实验室定位测试的结果
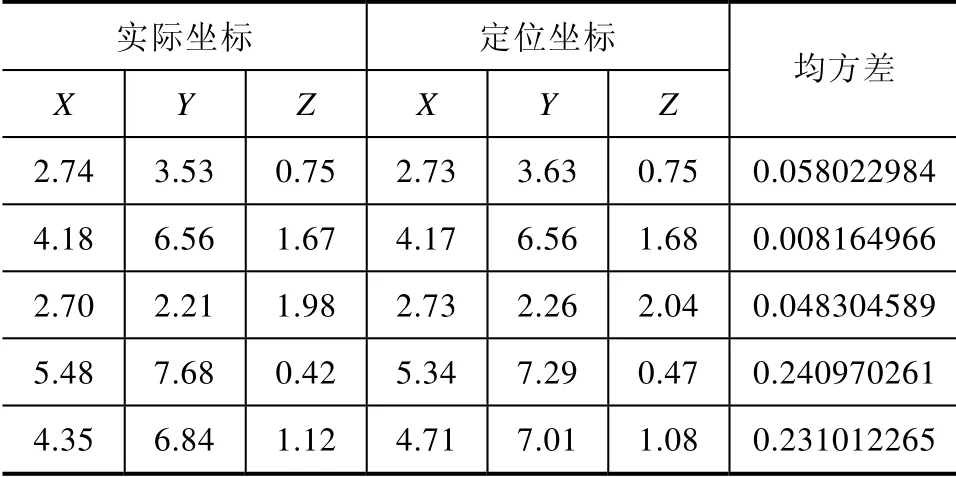
表3 基于定位信标节点筛选的三维定位结果
4 结束语
在变电运维作业现场,受定位精度及室内各种障碍等条件的限制,比较完善的定位技术目前无法很好地利用,因此变电站室内目标定位应用相对较少。本项目依据模糊隶属度理论进行定位信标节点的筛选,解决了由于安装条件限制而导致的Z轴定位波动较大的问题,通过实物测试结果表明,定位精度明显提高,满足变电站内人员精确定位的要求,解决了人员定位管理问题。
[1]谷红亮, 史元春, 申瑞民, 等. 一种用于智能空间的多目标跟踪室内定位系统[J]. 计算机学报, 2007, 30(9): 1607-1608.
[2]袁斌. 一种改进的基于TDOA的三维多点定位技术[J]. 信息与电脑(理论版), 2012(2): 104.
[3]郑飞, 郑继禹. 基于TDOA的CHAN算法在UWB 系统LOS和NLOS环境中的应用研究[J]. 电子技术应用, 2007, 33(11): 110-113.
[4]Chan Y T, Ho K C. A simple and efficient estimator for hyperbolic location[J]. Signal Processing, IEEE Transactions on, 1994, 42(8): 1905-1915.
[5]CAO Bin, SHEN Dou, SUN Jiantao, et al. Feature selection in a kernel space [C]//Proceedings of the 24th International Conference on Machine Learning. New York: ACM, 2007: 121-128.
猜你喜欢
中国交通信息化(2019年5期)2019-08-30
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
能源(2018年8期)2018-09-21
铁道通信信号(2018年3期)2018-04-19
能源(2017年11期)2017-12-13
雷达学报(2017年1期)2017-05-17
现代工业经济和信息化(2016年8期)2016-05-17
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
