激光陀螺双轴旋转导航系统高精度转动控制的设计与实现
2015-06-15 12:54王国臣袁保伦饶谷音韩松来
中国惯性技术学报 2015年4期
王国臣,袁保伦,饶谷音,韩松来
(国防科学技术大学 光电科学与工程学院,长沙 410073)
激光陀螺双轴旋转导航系统高精度转动控制的设计与实现
王国臣,袁保伦,饶谷音,韩松来
(国防科学技术大学 光电科学与工程学院,长沙 410073)
为实现高精度激光陀螺双轴旋转导航系统,通过理论分析,设计实现了双轴旋转导航系统所需的高精度转动控制方案。所设计的转动方案在实际旋转导航系统样机上进行了实验验证。实验结果表明,所设计的转动控制系统速率偏差优于2×10-5(°)/s,速率平稳度优于10-4,速率峰值波动优于3×10-3(°)/s,峰值定位误差优于0.001°。所设计的转动控制电路控制精度高,运行稳定可靠,很好地满足了研制激光陀螺双轴旋转导航系统样机的需求。
激光陀螺;惯性导航;双轴旋转;转动控制;PID
激光陀螺旋转导航系统[1-6]是在捷联惯导系统[7-11]的基础上发展起来的,它是在激光陀螺惯性测量组合(IMU)外面加上转动机构和测角装置,并以此控制IMU按照一定的次序旋转,从而使激光陀螺和加速度计的漂移对导航所产生的误差能够在一个转动周期内自动抵消,最终提高系统导航精度。
对于双轴旋转导航系统来说,为了完全自动补偿惯性元件常值漂移误差,从而达到高精度的惯性导航要求,必须实时控制IMU严格按照系统计算结果精确转动,否则不但可能会直接使系统的导航精度下降,而且会影响系统自标定及初始对准的精度和时间,从而间接影响系统的整体性能。因此,旋转机构的高精度控制技术是双轴系统的一项重要技术。
1 旋转控制方案的硬件实现
1.1 旋转控制部分的系统框图
系统旋转控制部分主要由通用计算机、外部导航计算机、电机控制电路(包含转动控制电路和功率驱动模块)、直流力矩电机、光栅角编码器组成。直流力矩电机安装在内、外轴系内,IMU的所有信息通过安装在内、外轴系中的导电滑环与外界进行数据交换。外部导航计算机则读取测角元件的角位置信息、计算载体的姿态信息,并向电机控制电路发控制指令,电机控制电路根据指令驱动直流力矩电机拖动IMU转动。如图1所示。
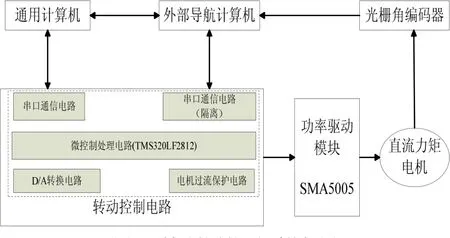
图1 转动控制部分系统框图Fig.1 Block diagram of the rotating scheme
1.2 转动控制电路的硬件实现
旋转系统电机控制电路的功能是接收导航计算机产生的转动控制指令,然后根据此控制指令产生与之相适应的电流驱动电机转动。电机控制电路由转动控制电路和功率驱动模块等功能模块组成。
为实现上述电机控制电路的功能,转动控制电路根据实际的需要采用TI公司的数字信号控制器TMS320LF2812来完成,转动控制电路与外部导航计算机之间采用隔离的串口通信方式进行数据交换,采用高精度的D/A与SMA5005匹配使用以确定输出给电机电流的大小,利用DSP通用I/O口对SMA5005进行其他必要控制如输出禁止等。另外,为保护电机不因过大的电流而损坏,过流保护电路也集成在转动控制板上。
需要说明的是,转动控制电路自身可以直接对光栅角编码器的输出脉冲进行计数,从而独立完成对系统两个轴的转动控制。但实际系统中,控制软件由外部导航计算机完成,转动控制电路只接收控制指令并转换为相应的D/A值,驱动SMA5005输出,完成对电机的控制
1.3 控制电机的选择
直流力矩电机是为满足低转速、大转矩负载的需要而设计制造的电动机。旋转系统在选择直流力矩电动机时,首先要确定电动机轴上所带的负载,然后再根据速度-转矩特性分析电动机的静态和动态转矩特性是否满足系统要求。电机轴上所带负载可分为负载转矩和转动惯量,一般应考虑到转矩平衡和惯量匹配。对于旋转系统来说,在严格配平之后,仅需要考虑系统轴承、电刷、滑环的摩擦力产生的力矩和系统沿转轴的转动惯量。除此之外,还应考虑到电机的内外径尺寸大小是否合适等因素。最后,外环电机和内环电机分别选用成都微精电机股份公司型号为J130LYX01和 J115LYX01的分装式直流力矩电动机。
1.4 测角元件的选择
测角元件可以选用旋转变压器、感应同步器、角度编码器(圆光栅)等器件来实现。旋转变压器和感应同步器输出的均是模拟电压信号,需要另加精密的转换电路才能将其输出转化为数字角度。角度编码器是利用测量圆光栅所产生的莫尔条纹的方法来测量所转动的角度,可以直接输出数字角度脉冲信号,经过简单的鉴相计数即可以得到转子相对定子转过的角度。三者各有优缺点,就其可靠性而言,旋转变压器和感应同步器对环境适应性强,在惯导产品中应用较多,而角度编码器使用方便,近年来在惯导产品中的应用有所增长。
系统实际选用Renishaw公司的光栅角编码器RESM20USA075,光栅环直径为75 mm,栅距为20 μm,细分卡型号为Si-NN-0100,分辨率为0.2 μm,每圈输出1184000 个脉冲,角度分辨率约为1.0946'',刻度误差优于±2.75″,系统误差优于±2.97″。
2 旋转机构控制方案的软件实现
2.1 控制方案的确定
旋转导航系统转动控制设计的主要性能指标为位置精度、速率精度和速率平稳度。另外,旋转系统采用转停的转位方式,因此实际系统运行中主要有静止和旋转两种运动状态。为使系统具有良好的调速性能必须采用闭环调节,设计良好的调节器进行校正。工程上一般采用位置环+速度环的控制方式或者“位置环+速度环+电流环”的控制方式来设计。速度环控制器的主要作用是减小位置调节过程中的振荡和超调,电流环控制器的作用是减小力矩波动,改善动态响应的快速性。根据旋转系统的实际情况和所选功率驱动模块的特点,实际系统中位置环和速度环控制由电机转动控制电路来完成,电流环控制则由功率驱动模块SMA5005自动完成。
旋转系统角位置给定量(该值由外部导航计算机根据系统转位方案自动产生)作为整个控制环路的输入信号,与实际的位置反馈信号一起对电机进行位置环和速度环控制;电流环的控制由SMA5005硬件上自动实现,软件上无需对其进行干预。闭环控制框图如图2所示。

图2 控制方式框图Fig.2 Block diagram of the control method
2.2 控制软件流程
系统的转动控制在停止期间和匀速转动期间采用PID控制算法;在转停状态变换过程中,为减小位置的超调引入加速度控制,系统从静止到匀速转动以及从匀速转动到静止的状态变换过程为匀角加速度运动。外部导航计算机的控制软件流程如图3所示,另外转动控制电路内的软件流程不再赘述。

图3 控制软件流程图Fig.3 Flowchart of the control software
3 旋转控制的实测性能
对于旋转系统来说,内轴和外轴是交替转停的。因此测试时按照内外轴交替的顺序进行,主要测试系统转动的速度性能和位置定位精度。
3.1 速度性能测试
系统所用光栅角编码器的分辨率为1.0946″,为降低由于光栅角编码器分辨率有限带来的测速误差,测试中使用1 s作为采用时间,这样光栅角编码器对测速的影响可降低到约0.0006 (°)/s。采用测量100 s数据的标准差除以平均值作为评价速率平稳性的指标,采用100 s数据的平均值与设置转速的差值作为角速度偏差。图4是测试数据中的部分细节图。表1为10 (°)/s和20 (°)/s时的内外轴测试性能。
从图4和表1可以看出,内外轴转动均基本平稳,速率偏差优于2×10-5(°)/s,速率平稳度优于410-,速率峰值波动优于3×10-3(°)/s;同时还可以看出,内轴转动性能相比较外轴而言略差,这是因为图中数据是内外轴同时控制得到的,外轴对内轴的干扰较之内轴对外轴的干扰要大,因此内轴的控制性能比外轴要略差。对旋转系统来说,载体输出姿态的精度直接受转动波动的影响,因此转动控制还要保证姿态解算周期间隔内的平稳度。图5为间隔1 ms的内外轴实测输出脉冲数,10 (°)/s和20 (°)/s对应的1 ms脉冲数分别为32.889和65.778,理想情况输出脉冲数应在(32, 33)和(65, 66)范围波动,而实际的波动范围是(32, 34)和(65, 67),也就是说控制引入了1个脉冲的波动,相当于1.0946″,应该说速率控制还是不错的。

图4 转速分别为10 (°)/s和20 (°)/s时的内外轴实测转速细节Fig.4 Detail curves for inner and outer axes at 10 (°)/s, 20 (°)/s

表1 转速为10 (°)/s和20 (°)/s时的内外轴实测数据Tab.1 Test data for inner and outer axes at 10 (°)/s, 20 (°)/s

图5 间隔1 ms的内外轴实测输出脉冲数Fig.5 Output pulse number for inner and outer at 1 ms interval
3.2 位置性能测试
旋转导航系统提高系统精度的核心就是对称相消,以消除系统的绝大部分误差。系统正反转如果无法回到原来位置显然会对导航精度有一定的影响,因此旋转系统转动控制的一个重要指标是位置的准确性。图6为转速分别为10 (°)/s、20 (°)/s、30 (°)/s和40 (°)/s时的内外轴180°正反转实测位置曲线。
采用测试时间内180°位置输出的最大值与0°位置输出的最小值之差再减去180°作为内外轴的峰值定位误差,计算结果如表2所示。可见系统周期性转动的峰值定位误差0.001°,已满足系统的要求。

图6 转速分别为10 (°)/s、20 (°)/s、3 (°)/s和4 (°)/s时的内外轴180°正反转实测位置Fig.6 Position curves at 10 (°)/s, 20 (°)/s, 30 (°)/s, 40 (°)/s for 180° forward & reverse rotating

表2 转速分别为10 (°)/s, 20 (°)/s, 30 (°)/s, 40 (°)/s 时的内外轴180°正反转实测位置误差Tab.2 Position errors at 10 (°)/s, 20 (°)/s, 30 (°)/s, 40 (°)/s for 180° forward & reverse rotating
4 旋转控制的一些思考
本文的旋转控制是以系统内、外轴角光栅编码器输出的角位置变化来控制IMU 旋转的。如果需要隔离载体的角运动,则可以根据导航解算出的姿态信息进行转动控制,但控制系统的控制精度是不受影响的。
5 结束语
本文详细阐述了激光陀螺旋转惯导系统转动控制方案的设计与实现。所设计的转动控制电路速度、位置控制精度高,运行稳定可靠,很好地满足了研制激光陀螺旋转惯导系统样机的需求。
(References):
[1] Levinson E, Giovanni C S. Laser gyro potential for long endurance marine navigation[C]//IEEE Position Location and Navigation Symposium. 1980: 115-129.
[2] 王国臣. 空间环路四频激光陀螺及其组成的双轴旋转惯导系统关键技术研究[D]. 长沙: 国防科技大学研究生院, 2010.
[3] 龙兴武, 于旭东, 张鹏飞, 等. 陀螺单轴旋转惯性导航系统[J]. 中国惯性技术学报, 2010, 18(2): 149-153.Long Xing-wu, Yu Xu-dong, Zhang Peng-fei, et al. Single-rotating inertial navigation system with ring laser gyroscope[J]. Journal of Chinese Inertial Technology, 2010, 18(2): 149-153.
[4] 陆至东, 王晓斌. 系统级双轴旋转调制捷联惯导误差分析及标校[J]. 中国惯性技术学报, 2010, 18(2): 135-141. Lu Zhi-dong, Wang Xiao-bin. Error analysis and calibration of systematic dual-axis rotation-modulating SINS[J]. Journal of Chinese Inertial Technology, 2010, 18(2): 135-141.
[5] 纪志农, 刘冲, 蔡善军, 等. 一种改进的双轴旋转惯导系统十六位置旋转调制方案[J]. 中国惯性技术学报, 2013, 21(1): 46-50. Ji Zhi-nong, Liu Chong, Cai Shan-jun, et al. Improved sixteen-sequence rotation scheme for dual-axis SINS[J]. Journal of Chinese Inertial Technology, 2013, 21(1): 46-50.
[6] Wang Guo-chen, Rao Gu-yin, Han Song-lai, Zhang Mei, Yuan Bao-lun. Research on the thermal relaxation effect of nonplanar four-frequency differential laser gyro[J]. Applied Optics, 2013, 52(19): 4549-4555.
[7] Sun Wei, Xu Ai-gong, Gao Yang. Strapdown gyrocompass algorithm for AUV attitude determination using a digital filter[J]. Measurement, 2013, 46(1): 815-822.
[8] Lv Han-feng, Zhang Liang, Wang Ding-jie, Wu Jie. An optimization iterative algorithm based on nonnegative constraint with application to Allan variance analysis technique[J]. Advances in Space Research, 2014, 53(5): 836-844.
[9] Ning Xiao-lin, Liu Ling-ling, Fang Jian-cheng, Wu Weiren. Initial position and attitude determination of lunar rovers by INS/CNS integration[J]. Aerospace Science and Technology, 2013, 30(1): 323-332.
[10] Narasimhappa M, Sabat S L, Peesapati R, et al. An innovation based random weighting estimation mechanism for denoising fiber optic gyro drift signal[J]. Optik -International Journal for Light and Electron Optics, 2014, 125(3): 1192-1198.
[11] Zhang Lun-dong, Lian Jun-xiang, Wu Mei-ping, et al. An improved computation scheme of strap-down inertial navigation system using rotation technique[J]. Journal of Central South University, 2012, 19(5): 1258-1266.
High-precision rotating scheme for laser gyroscope dual-axis rotating inertial navigation system
WANG Guo-chen, YUAN Bao-lun, RAO Gu-yin, HAN Song-lai
(College of Optical Science and Engineering, National University of Defense Technology, Changsha 410073, China)
To realize high-precision laser gyroscope dual-axis rotating inertial navigation systems(INS), a high-precision rotating scheme for the INS is put forward through theoretical analysis. Then the rotating scheme system is tested in the actual dual-axis rotating INS. Tests results show that: the speed deviation is superior to 2×10-5(°)/s, the speed accuracy is superior to10-4, the maximum speed error is superior to 3×10-3(°)/s, and the maximum position error is superior to 0.001°. The rotating scheme’s circuit has such advantages as high-precision, high stability and reliability. The designed rotating scheme system meets the demands for developing the laser gyroscope dual-axis rotating INS.
ring laser gyroscope; inertial navigation; dual-axis rotating; rotating scheme; PID
U666.1
A
1005-6734(2015)04-0438-04
10.13695/j.cnki.12-1222/o3.2015.04.004
2015-02-27;
2015-06-25
国家自然科学基金(61104199,61203199)
王国臣(1980—),男,博士,讲师,从事激光陀螺及惯性导航研究。E-mail:wangguochen0912@yeah.net
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
湖南电力(2021年1期)2021-04-13
汽车维护与修理(2019年3期)2019-08-08
汽车维护与修理(2018年5期)2018-09-29
汽车维护与修理(2018年23期)2018-07-03
北京航空航天大学学报(2018年1期)2018-04-20
制造技术与机床(2017年8期)2017-11-27
凿岩机械气动工具(2017年3期)2017-11-22
汽车维护与修理(2017年5期)2017-11-17
中国惯性技术学报(2017年1期)2017-06-09