基于模糊控制的纯电动汽车复合电源功率分配策略研究*
2015-06-11 00:46郑丽辉赵志刚方晓汾
机械研究与应用 2015年4期
郑丽辉,赵志刚,方晓汾
(衢州职业技术学院机电工程学院,浙江衢州 324000)
0 引言
面对日益严重的环境恶化和能源危机问题,纯电动汽车以其环保与节能的双重优势已经成为最具发展前途的交通工具之一[1]。但现有的以蓄电池为单一电源的纯电动汽车存在功率密度低、电池循环寿命短等缺点,一直制约着纯电动汽车的商业化发展[2-3]。超级电容(Ultra Capacitor,UC)是最近几年随着新电极材料的出现而发展起来的一种具有超强充放电能力、可提供强大脉冲功率的物理二次电源[4]。它比蓄电池具有更高的功率密度和更长的循环寿命,但同时也存在能量密度低的缺点。以蓄电池和超级电容组成的复合电源系统作为纯电动汽车的储能装置是现阶段解决纯电动汽车续驶里程不足的有效手段。为了充分发挥蓄电池和超级电容的各自优势,就需要一套高效可靠的功率分配策略来协调两者的输入输出功率。
以蓄电池-超级电容复合电源纯电动汽车为研究对象,通过分析复合电源基本结构,结合蓄电池和超级电容各自特性,以模糊控制理论为基础设计驱动功率分配策略,并建立Matlab/Simulink仿真模型,验证了所建立的控制策略的有效性。
1 复合电源纯电动汽车基本结构
复合电源纯电动汽车动力系统结构如图1所示。
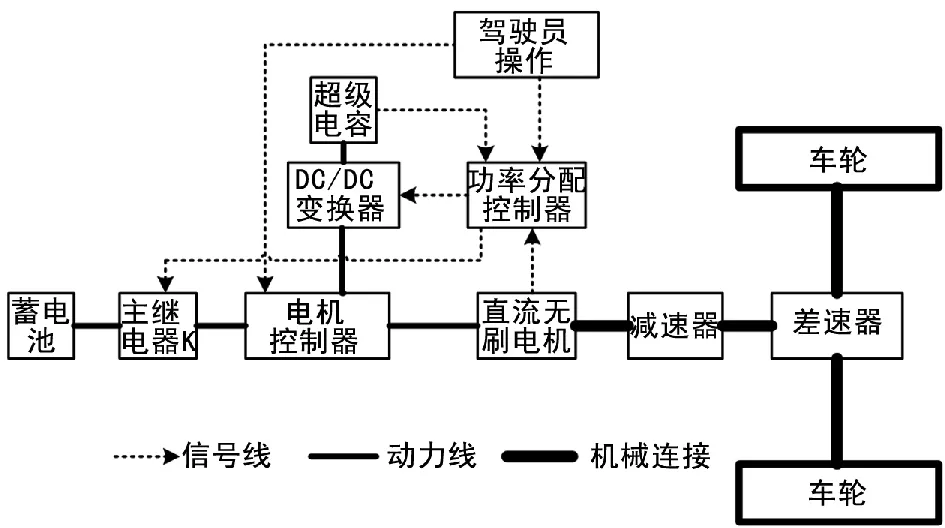
图1 复合电源纯电动汽车动力系统结构
超级电容经双向DC/DC变换器与蓄电池间接并联构成复合电源系统。双向DC/DC变换器与主继电器K构成功率分配执行机构。功率分配控制器采集加速踏板、超级电容SOC和母线电流等信号,根据制定的功率分配控制策略输出相应的控制信号控制功率分配执行机构,实现合理分配超级电容与蓄电池的输出功率的目的[5-6]。
功率分配控制器是复合电源功率分配的核心控制单元,是实现功率分配策略的载体[7]。根据车辆的运行工况以及相应的能量流动方向将车辆运行状态划分为:蓄电池单独驱动模式、蓄电池与超级电容共同驱动模式、蓄电池对超级电容预充电模式和再生制动模式[8]四种模式。
2 复合电源纯电动汽车功率分配策略目标
所提出的基于模糊控制算法的复合电源纯电动汽车功率分配策略能够满足以下要求:
(1)准确响应驾驶员动作,尽量做到与传统汽车驾驶感觉一致,即保证车辆的驾乘舒适性。
(2)在不影响整车动力性和经济性的前提下,确保蓄电池的输出功率尽可能恒定和平滑,充分发挥超级电容对总线功率的调节作用,减小大功率充放电对蓄电池的损伤,提高蓄电池的循环寿命和储能单元的能量利用率。
(3)充分回收再生制动能量。
3 模糊控制器设计
3.1 基本工作原理
模糊控制是以模糊逻辑推理、模糊集理论和模糊语言变量为基础的,从行为上模仿人的模糊推理和决策过程的一种控制手段。该方法将人类专家对特定对象的控制经验,运用模糊集理论进行量化,转化为可数学实现的控制器,从而有效控制被控对象[9]。
模糊控制系统结构如图2所示,由模糊化接口、知识库、模糊推理、解模糊化接口四部分组成。精确的输入变量经量化后输入模糊化接口,形成模糊的语言变量输入,结合知识库中预先制定的输入输出关系,进行模糊推理得到模糊结论,经解模糊化接口得到精确的控制量,并经过量化得到精确输出[10]。

图2 模糊控制系统结构
3.2 功率分配策略的模糊控制器设计
由于蓄电池的输出电压以及超级电容经双向DC/DC变换器调控后的输出电压都与驱动电机的额定电压相近且变化范围很小,所以蓄电池与超级电容之间的输出功率分配可以等效为输出电流分配。选择超级电容输出电流Iuc作为模糊控制功率分配策略的输出量。复合电源纯电动汽车行驶过程中要保证动力性的要求,同时又要尽量防止蓄电池大电流放电的情况发生,需根据母线电流总需求I的大小来分配超级电容的输出电流Iuc,同时,超级电容SOC变化范围也需要充分考虑。因此将母线电流总需求I和超级电容SOC作为模糊控制功率分配策略的输入量。
模糊控制功率分配策略的原理如图3所示。根据输入量的大小经模糊控制策略分析以后,得到超级电容目标输出电流,通过闭环控制使超级电容经双向DC/DC变换器斩波升压后的实际输出电流跟随目标电流值,额外部分则由蓄电池补充。

图3 模糊控制功率分配策略原理图
3.2.1 模糊化接口
模糊化接口是通过在控制器的输入输出论域上定义语言变量,使精确的输入输出值转换为模糊的语言值。笔者分别定义母线电流总需求值I和超级电容SOC的量化因子为KI、KSOC,将输入语言变量的论域从实际的连续域转变成离散的有限整数域;定义比例因子KIuc将输出语言变量的论域从离散的整数域转变成实际的连续输出域,如图4所示。

图4 实数域至整数域转换图
文中母线电流总需求值的连续取值范围是I=[0,250]=[Imin,Imax],Imin表示母线电流的最低限值,Imax表示母线电流的最高限值。I经量化因子Ki转变为离散的证书于,即 I'={0…11,12,13…25}。量化因子Ki计算方式如式(1):

超级电容SOC连续取值范围是SOC=[0.4,1]=[SOCmin,SOCmax],SOCmin表示低限值,SOCmax表示高限值。SOC经量化因子KSOC转变为离散的整数域,即SOC'={4…6,7,8…10}。量化因子 KSOC计算方式如式(2):

模糊控制器输出即为超级电容输出电流,其取值Iuc'={-3…2,3,4…10},为一组离散的整数值,经比例因子 KIuc转变到实际输出 Iuc=[-30,100]=[Iucmin,Iucmax],Iucmin表示低限值(最大预充电电流),Iucmax表示高限值。比例因子KIuc的计算方式如式(3)所示:

母线电流总需求值I输入包括9个模糊子集,分别是极小(ES)、很小(VS)、较小(SM)、中等(MI)、较大(BG)、很大(VB)、极大(EB)、超级大(VEB)、超级超级大(PVEB)。隶属度函数取正态分布型(高斯形式,其中ai为函数的中心值,bi为函数的宽度。超级电容的主要任务是在母线电流需求值超过一定范围时能尽可能多地填补母线电流峰值,使蓄电池输出电流值稳定在一个较小范围内,故对母线电流需求值较大区段进行细分以提高输出灵敏度,令与{ES,VS,SM,MI,BG,VB,EB,VEB,PVEB}对应的高斯基函数的中心值分别为{0,5,10,15,17,19,21,23,25},其隶属度函数如图 5 所示。
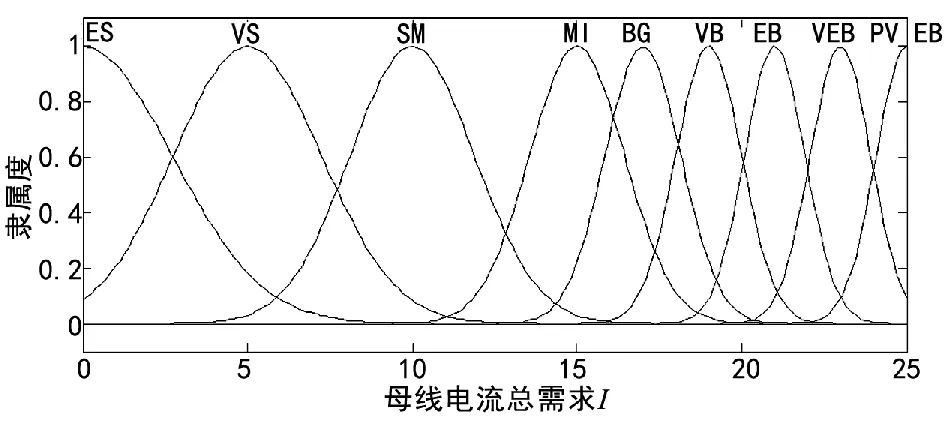
图5 母线电流总需求隶属度函数
将SOC的输入分成7个模糊子集,分别是极低(EL)、很低(VL)、较低(LO)、正常(ST)、较高(HI)、很高(VL)、极高(EH)。隶属度函数取正态分布型(高斯基)函数的形式,令与{EL,VL,LO,ST,HI,VL,EH}对应的高斯基函数的中心值分别为{4,5,6,7,8,9,10},其隶属度函数如图6所示。

图6 超级电容SOC隶属度函数
超级电容的输出电流Iuc作为模糊控制器的输出,包含的模糊子集一次为负大(NB)、负小(NS)、正零(ZE)、正小(PS)、正中(PM)、正大(PB)、正很大(PVB)、正极大(PEB)。隶属度函数取正态分布型(高斯基)函数的形式,令与{NB,NS,ZE,PS,PM,PB,PVB,PEB}对应的高斯基函数的中心值分别为{-3,-1.5,0,2,4,6,8,10},其隶属度函数如图 7。

图7 超级电容输出电流隶属度函数
3.2.2 规则库建立
各变量的模糊子集和隶属度函数确定之后,还需要根据对被控对象的物理特性的理解和控制工程经验设计一套合理的控制规则。以蓄电池和超级电容组成的复合电源纯电动汽车,功率分配策略的制定主要考虑以下几方面:
(1)维持超级电容SOC在正常范围,使超级电容既能保留一定的能量用以辅助蓄电池大电流供电,又有足够的空间用以储存电动汽车再生制动时回收的电能。低于下限时蓄电池需要对超级电容预充电。
(2)超级电容SOC较高时,超级电容放电电流适当加大。
(3)考虑到系统的安全性及可靠性,再生制动过程中预充电功能停止。
(4)整个能量管理的本质是充分实现超级电容的“削峰填谷”的作用,除了电动汽车再生制动过程中回收的部分能量外,整个系统的全部能量还是来源于蓄电池。
根据以上工程经验,按照if…is…and…is…then…is…的形式表达,制定如下控制规则:
(1)超级电容SOC低、母线电流需求值I大时,蓄电池以大电流供电。
(2)超级电容SOC低、母线电流需求值I小时,蓄电池以较大电流供电驱动电机并同时对超级电容预充电。
(3)电机再生制动时,蓄电池不供电,超级电容吸收全部再生制动能量。
(4)超级电容SOC很高,母线电流需求值I大,超级电容和蓄电池同时供电,限制蓄电池输出电流的峰值。
(5)超级电容SOC很高,母线电流需求值I小,蓄电池单独供电。
根据上述五条能量分配原则,设计模糊控制规则库如表1所列。

表1 功率分配模糊推理规则
3.2.3 功率分配的模糊推理
根据规则库中蕴含的输入输出关系,通过模糊推理方法得到模糊控制器的输出模糊值[11]。模糊推理过程可以按照if…is…and…is…then…is…的形式表达:

式中:Ai、Bi、Ci是第 i条规则中与 I、SOC、Iuc对应的语言值。规则库中第i条控制规则Ri蕴含的模糊关系为:
Ri=(Ai×Bi)×Ci
式中:Ai×Bi表示Ai与Bi的笛卡尔乘积。控制规则库中的n条规则之间可以看作是“或”,也就是“求并”的关系,即:

输入变量的模糊取值分别为Ai'和Bi',与之对应的输出模糊取值为Ci'时,可通过下式得到:

式中:°表示内积运算。
运用上述模糊推理方法,得到具体功率分配策略如图 8 所示[12]。
4 功率分配策略的验证
将上述基于模糊控制算法的功率分配策略应用到复合电源纯电动汽车上,并基于Matlab/Simulink平台进行仿真验证。当母线电流需求值I为50 A、100 A、150 A和200 A情况下,超级电容电流随其SOC的变化情况,如图9所示。图中电流值为负时表示预充电过程超级电容输入电流的大小,电流值为正时表示共同驱动时超级电容输出电流的大小[13]。

图8 功率分配模糊推理图
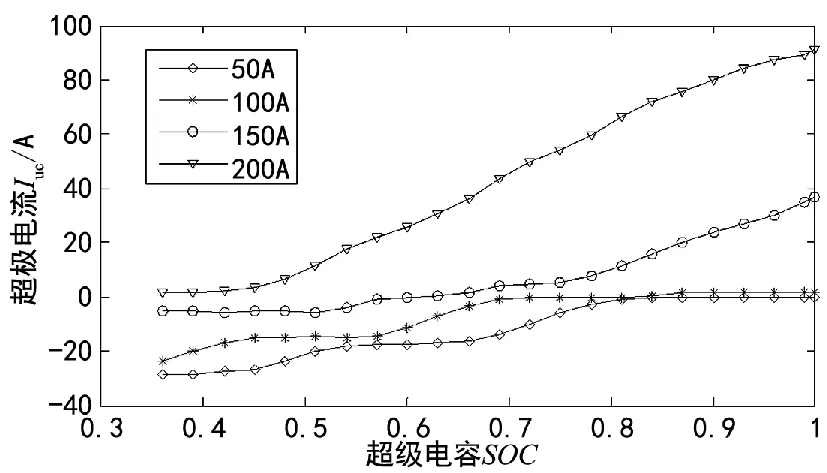
图9 不同母线电流需求值时超级电容电流与SOC变化关系
从图9中可看出,当超级电容SOC低于正常范围[0.65,0.75]时,随着母线电流需求值的增大,预充电电流值逐渐减小,随着超级电容SOC的降低,预充电电流值也逐渐增大;当超级电容SOC高于正常范围时,随着母线电流需求值的增大,超级电容输出电流逐渐增大,随着超级电容SOC的升高,超级电容输出电流逐渐增大,图10为母线电流与蓄电池输出电流仿真曲线。整个变化区间内功率分配策略输出结果如表2所列。
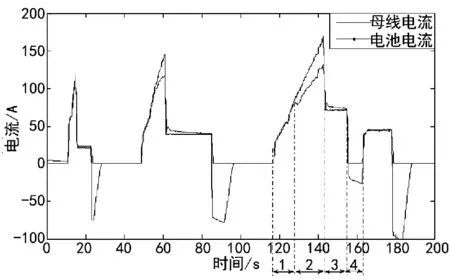
图10 母线电流与蓄电池输出电流仿真曲线
为了进一步验证能量管理策略的可行性,进行循环工况测试。仿真中所采用的循环工况是ECE市区运行工况,设置超级电容初始电压为60 V。图10是母线电流及蓄电池输出电流曲线,图11是超级电容电流与SOC仿真曲线。
在图10中,在下母线电流较小,全部由蓄电池提供,超级电容处于关闭状态,既不输出电流也不吸收电流[14]。
共同驱动模式:此时电机需求功率大,母线电流出现输出尖峰,为了防止大电流冲击,功率分配控制器控制DC/DC变换器,使超级电容输出一部分功率,配合蓄电池共同驱动电机。从图中可知,共同驱动模式下随着母线电流的增大超级电容分担的比例也逐渐增大,说明此控制策略能达到较理想的效果。

表2 功率分配策略仿真结果
蓄电池对超级电容预充电模式:此时车辆匀速巡航,电机需求功率小,而超级电容经过前一段时间放电后SOC降到较低值,为了使超级电容SOC达到正常范围以利与共同驱动模式的进行,蓄电池对超级电容进行小电流预充电。需要说明的是,预充电模式在停车或者小功率驱动时都能进行,但考虑到系统安全性,再生制动与预充电不能同时进行。
再生制动模式:此阶段车辆减速,电机处于发电状态,产生的再生制动力矩配合机械制动共同作用使车辆减速,相应地回收一部分动能储存到超级电容中。从图10中可知,此阶段母线电流为负值,蓄电池电流为零,表明电机向外输出能量,而蓄电池从主回路断开,由超级电容作为再生制动的储能装置。

图11 超级电容电流与SOC仿真曲线
同样地,图11中1、2、3、4四种模式分别表示单独驱动模式、共同驱动模式、预充电模式和再生制动模式。在单独驱动模式下,超级电容既不充电也不放电,输出电流为零,SOC保持不变;在共同驱动模式下,超级电容向外输出电能,电流为正,SOC迅速下降到0.6左右;在预充电模式和再生制动模式下,超级电容吸收电能,电流为负值,SOC上升到0.95左右。
5 结论
(1)各模式下能量管理系统均能较好地控制各储能单元按照预期目标工作。
(2)蓄电池基本上处于低电流放电状态,因此,能量管理系统在不影响车辆动力性的前提下,可以很好地保证蓄电池始终工作在最佳状态。
(3)在车辆制动过程中,超级电容SOC有明显的上升,这表明能量管理系统可以有效回收制动能量,延长纯电动汽车的续驶里程。
[1] 张文亮,武 斌,李武峰,等.我国纯电动汽车的发展方向及能源供给模式的探讨[J].电网技术,2009,33(4):1-5.
[2] 宋永华,胡泽春,阳岳希.电动汽车电池的现状及发展趋势[J].电网技术,2011,35(4):1-7.
[3] 白中浩,曹立波,杨 健.纯电动汽车用动力电池性能评价方法研究[J].湖南大学学报:自然科学版,2006,33(5):48-51.
[4] 曹秉刚,曹建波,李军伟,等.超级电容在电动车中的应用研究[J].西安交通大学学报,2008,42(11):1317-1322.
[5] 余志生.汽车理论[M].北京:机械工业出版社,2009.
[6] 闫晓金,潘 艳,宁 武,等.超级电容-蓄电池复合电源结构选型与设计[J].电力电子技术,2010(5):75-77.
[7] Takahashi M,Tobishima S,Takei K,et al.Reaction Behavior of LiFePO4 as a Cathode Material for Rechargeable Lithium Batteries[J].Solid State Ionics,2002,148(3):283-289.
[8] 侯俊杰.电动汽车再生制动系统双向 D C/D C变换器的设计[J].机械研究与应用,2011(2):73-75.
[9] Pell W G,Conway B E,Adams W A,et al.Electrochemical Efficiency in Multiple Discharge/Recharge Cycling of Supercapacitors in Hybrid EV Applications[J].Journal of Power Sources,1999,80(1):134-141.
[10] Pay S,Baghzouz Y.Effectiveness of Battery-supercapacitor Combination in Electric Vehicles[C]//Power Tech Conference Proceedings,2003 IEEE Bologna.IEEE,2003,3:6 pp.Vol.3.
[11] 吴海涛,孔 娟,夏东伟.基于MATLAB/Simulink的光伏电池建模与仿真[J].青岛大学学报:工程技术版,2007,21(4):74-77.
[12] 卿 浩,辜承林,唐小琦,等.无刷直流电机模糊控制系统的建模及仿真分析[J].微电机,2006,39(3):19-21.
[13] 何 仁.汽车制动能量再生方法的探讨[J].江苏大学学报(自然科学版),2004,24(6):1-4.
[14] 李贵远,陈 勇.动力电池与超级电容混合驱动系统设计与仿真[J].系统仿真学报,2007,19(1):101-105.
猜你喜欢
农业装备与车辆工程(2022年6期)2022-10-30
科技与创新(2021年19期)2021-10-14
汽车电器(2021年2期)2021-03-05
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21