
汽车线控转向系统容错和故障诊断技术综述
2015-06-10 01:04于蕾艳
重庆交通大学学报(自然科学版) 2015年5期
于 蕾 艳
(中国石油大学(华东) 机电工程学院,山东 青岛 266580)
汽车线控转向系统容错和故障诊断技术综述
于 蕾 艳
(中国石油大学(华东) 机电工程学院,山东 青岛 266580)
分析了线控转向系统的基本结构、应用和容错要求;研究了线控转向系统传感器、电子控制单元、执行机构、通信网络、电源等关键部件的容错方法,以及国内外研究现状,包括基于观测器的解析冗余方法等;分析了线控转向系统故障诊断方法的国内外研究现状。为提高线控转向系统的容错和故障诊断能力、实现批量化生产等提供借鉴。
车辆工程;汽车线控转向系统;容错;故障诊断;可靠性
源于飞机线控操纵的汽车线控转向技术符合汽车安全、节能、环保的要求,是汽车结构的重要变革。由于线控转向(Steer-By-Wire,SBW)系统在转向盘和转向轮之间不存在机械连接,而代之以电子连接方式,具有很多优点,例如减少了在车辆碰撞时对驾驶员的伤害;采用电力驱动,无转向液,实现环保;轻量化,可模块化灵活设计;提高动力学控制的灵活性,实现主动转向和路感优化,改善了车辆的主动安全性、操纵稳定性等[1]。
但是正由于线控转向系统在转向盘和转向轮之间不存在机械连接,电子设备的鲁棒性比机械、液压部件低,电子部件可能毫无预警信号的发生故障。某个传感器、执行机构或电子控制单元发生故障时,必须快速以容错方式处理,否则将发生不期望的转向。因此,亟待提高的容错与故障诊断技术是线控转向技术能够产业化的关键技术之一[1]。笔者在大量文献调研的基础上,分析研究线控转向系统容错与故障诊断技术方面国内外研究方法、取得进展等,为深入研发具有高度安全性、可靠性的线控转向系统提供借鉴。
1 汽车线控转向系统分析
1.1 汽车线控转向系统基本结构和功能
图1为纯线控、无机械或液压备份系统的汽车线控转向系统基本结构示意。包括传感器、控制器、执行器、通信网络等[2]。其主要功能仍然是转向和通过转向盘给驾驶员转向力反馈两方面,但其执行机构采用电机。
对于转向功能,安装在短转向柱上的转向盘转角、力矩传感器检测转向盘转角、力矩,输入电子控制单元(ECU),ECU识别驾驶员转向意图,根据转向控制算法控制转向执行机构实现预期车轮转角。对于路感反馈功能,传感器检测作用在转向轮上的力,ECU根据路感控制算法控制力反馈装置提供给驾驶员可调的转向阻力矩,改善驾驶员对于车辆状态的感觉。

图1 线控转向系统基本结构示意Fig.1 Basic structure schematic diagram of steer-by-wire
1.2 汽车线控转向系统的应用
1996年,7个汽车公司和两所大学参与了欧盟资助的线控项目。美国、日本、德国、中国等许多国家的大学、公司相继展开了线控转向系统设计、控制、容错等方面研究,制造出线控转向系统样机。各类电动汽车、巡航辅助高速公路系统、先进的安全车辆、智能交通车辆采用线控转向系统,大大降低驾驶员的驾驶负荷,改善车辆动力学控制性能。时间触发架构(Time-Triggered Architecture,TTA)工作组研究农用拖拉机、叉车、轮式装载机等非公路车辆线控转向系统,降低操作者的操作负荷[2]。
1.3 汽车线控转向系统的容错要求
线控转向系统实现上路行驶要求的主要挑战是保证可靠性、安全性、成本降低到合理水平。采用机械转向系统备份,可以实现在线控转向系统发生故障时由机械转向系统实现转向功能,但其结构复杂,仅是现阶段的过渡方案,最终的方案是无机械、液压系统备份的纯线控转向系统。线控转向系统是基于微处理器控制器、传感器、电子控制的执行机构的控制系统,某个部件发生故障时必须容错,确保系统继续工作。故障是系统外部状态的偏离,由磨损、老化、受热、机械压力等引起。提高可靠性的方法包括设计、研发、试验阶段防止故障产生;系统运行中容错;故障诊断与根除;基于对系统属性的测量、计算进行故障预测以评价系统可靠性等[3]。
2 线控转向系统的容错技术
容错技术多采用冗余原则,包括被动冗余方案与主动冗余方案,被动冗余方案中冗余部分作为备份,只有系统出现故障时才工作;主动冗余方案中,冗余部分与系统并行工作。有系统重构策略和故障隐蔽策略两种容错策略,系统重构策略包括故障检测、故障定位发现故障源、系统恢复三步;故障隐蔽策略采用复制方法,不涉及故障检测和对检测故障的恢复[3]。
线控转向系统的容错方法主要包括硬件冗余容错方法和软件容错方法等。
2.1 汽车线控转向系统的硬件冗余容错结构
硬件冗余是在线控转向系统基本结构的基础上将一些关键电子部件如传感器、执行机构、通信网络、电源等两倍、甚至三倍冗余,三倍冗余成本较高,多采用两倍冗余。图2为线控转向系统转向子系统两倍硬件冗余容错结构示意。两个电机均与蜗杆连接,蜗杆传动减速器驱动双小齿轮-齿条转向机构。每个电机控制器实现内环闭环电机力矩控制和电机故障检测。两个微控制器通过仲裁总线互相连接,实现转向轮控制[4]。如果某个部件发生故障,其备用部件工作,车辆继续安全驾驶,即单个故障容错。
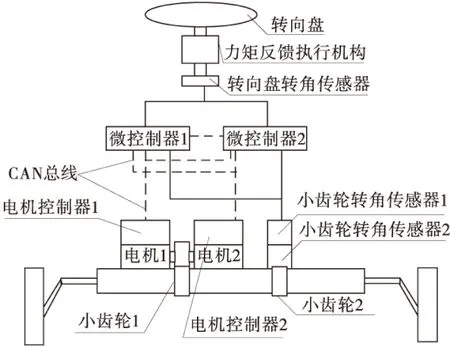
图2 线控转向系统转向子系统硬件冗余容错结构示意
2.2 关键部件的容错方法
仅通过硬件冗余实现容错的线控转向系统缺点是结构复杂,成本较高。为了降低成本,不牺牲容错性能的前提下必须降低冗余部件的总数。方法之一是利用解析冗余,线控转向系统大多采用软件冗余(完整性控制)与硬件冗余相结合的容错控制方法[5]。
2.2.1 传感器的容错方法
传感器是考虑容错的主要部件之一。解析冗余方法比较测量数据和已知数学模型,简单灵活、成本低,优于硬件冗余。利用车辆和线控转向系统的合并模型设计全状态观测器估计车身侧偏角。由质心侧偏角观测、车辆横摆角速度、转向电机电流测量值等估计转向轮转向角,这为ECU增加了一个转向轮转向角值,与物理传感器比较。转向角分析值越多,系统越鲁棒。Simulink仿真结果表明,对于单点故障,基于观测器的解析冗余方法降低冗余传感器总数而保持高可靠性,达到和全硬件冗余系统一样高的容错水平[4]。可利用非线性观测器的基于解析冗余的预测容错控制[6]。
基于多维Gauss 隐藏Markov模型的容错控制策略,利用硬件冗余方法建立转向盘转角传感器容错控制策略。硬件在环试验验证有效改善了线控转向车辆不发生传感器故障的可靠性和安全性[7]。
采用基于鱼群算法优化的最小二乘支持向量回归机方法,利用鱼群算法的寻优能力迭代求解最小二乘支持向量回归机中的矩阵方程组,将训练好的回归机用于质心侧偏角的预测输出,代替传统观测器的估计输出。减少计算时间,提高回归机训练效率;相比观测器,有较好的抗干扰能力[1]。
2.2.2 电子控制单元的容错方法
可重构容错控制律由线性反馈控制律和基于在线优化的控制分配器组成,控制器设计方法根据控制分配器的非线性输入-输出特性保证系统闭环稳定性[8]。
图3中,两个微控制器采用主从结构,主控制器实现所有的控制功能,从控制器提供冗余。主控制器发生故障时,由从控制器控制。每个微控制器发送表明其故障状态的数字输出信号到另一个微控制器的输入端口,当主控制器发生故障时,从控制器接收到主控制器的低信号,自动重配置进行控制[9]。在Visteon底盘先进技术部的线控转向试验台进行容错试验,发生某个电机控制环或微控制器等单点故障时,双控制器架构自动平顺重构,不降低控制系统性能。

图3 容错控制器Fig.3 Schematic diagram of fault tolerant controller
利用试验台架的硬件在环仿真结果表明,基于分布式处理和异常决策机制的电子控制单元双核容错控制架构和协调机制可行,有效改善了ECU的可靠性和安全性[10]。
2.2.3 执行机构的容错方法
执行机构容错可采用多个执行机构并行、静态或动态冗余;或执行机构里可靠性低的部件采用冗余,例如电机可采用三个绕组。利用最小方差方法、直流电机模型离线辨识电机相关参数;基于自适应Kalman滤波技术在线估计参数。在线估计和离线估计的对比结果、车辆试验等表明,容错控制有效改善了线控转向系统可靠性和安全性。如图2,采用双电机分别驱动转向机构,一个电机产生故障时,另一个电机驱动,实现转向功能[10]。
2.2.4 通信网络容错的容错方法
转向系统要满足功能和安全性要求,需要容错的数据通信架构。TTA线控转向工作组致力于线控转向系统参考框架,如农用拖拉机为75/321/EEC[2]。自2002年,已经成功推广了时间触发框架,是可实现高可靠性的实时系统的分布式的计算机架构,可确保最坏的情况下数据总线仍能传输最重要的消息。TTA系统的硬件和软件实现都具有容错性。硬件容错依赖冗余节点和多个信道,软件利用控制基本服务的算法容错。如UN ECE 79 R2第一次为线控转向系统上路许可提供了基础。
利用状态传递图建模单信道线控转向系统,分析系统特性和故障事件率之间的关系,进行有备份信道的容错系统的功能安全性分析,研究故障事件率与主信道故障率的关系,主信道故障的检测速度等[11]。
2.2.5 电池的容错方法
利用安培小时方法、开路电压方法、扩展Kalman滤波方法等有效估计荷电状态,判断动力电池是否能保证性能,必要时激活容错控制。通过冗余电池并联连接获得电池容错控制[12]。
2.3 其它容错方法
日本JTEKT公司研究基于转向、制动、加速的多样性容错架构,包括线控转向系统、在线控转向发生故障时利用制动、加速实现转向的后备系统,其后备转向功能基于驾驶员制动、加速意图选择。驾驶模拟器研究表明,在高速公路上前方避障期间,线控转向系统发生故障时,驾驶员仍然可通过转向盘操纵车辆,避免了线控转向系统过度冗余引起的成本和体积增加问题[13]。
3 线控转向系统的故障诊断研究
系统故障按故障本质分为硬件故障和软件故障;按故障持续时间分为永久性故障、瞬时故障和间歇故障;按故障活动性分为潜伏故障和活动故障等;按故障域分为内容故障、时间故障;按故障可检测性分为信号揭示故障和无信号揭示故障;按故障后果分为无害故障、微小故障、危险故障、灾难性故障等[3]。
3.1 关键部件的故障诊断
3.1.1 传感器的故障诊断
为使系统鲁棒,传感器测量必须准确可靠,必须消除有故障的信号以防止不期望的转向效果。基于测量信号的故障诊断方法包括门限值检查、真实值检查;对于单周期随机信号的基于信号模型的方法;对于两个或多个相关信号的基于过程模型的方法等。图4的故障诊断流程中,既采用了基于信号模型的方法,又采用了基于过程模型的方法[3]。

图4 故障诊断流程Fig.4 Schematic diagram of fault detection flow
对于静态冗余,需要至少3个冗余部件输出信号通过多数表决算法进行故障诊断;对于动态冗余,基于模型的方法进行故障诊断。基于两个物理车轮转角传感器(一个绝对位置传感器和一个相对位置传感器组合)、车轮转角传感器的解析估计值(代替第三个物理传感器),利用多数表决方法建立的故障检测和隔离算法监测发生故障的传感器以保持安全行驶,产生单点故障时,该算法与全硬件冗余的系统容错能力相同[6]。
针对参数不确定性和传感器故障,基于线性矩阵不等性设计鲁棒H∞滑模观测器,估计横摆角速度等系统状态,估计误差动力性渐进稳定。仿真验证了存在不确定时,滑模观测器仍精确估计横摆角速度传感器出现的故障,对参数不确定性鲁棒[5]。
利用基于刁番图的长范围预测器改善故障检测效率。利用线控转向硬件在环试验台验证总体预测容错控制策略,故障诊断和隔离算法融合传感器解析冗余无损系统整体鲁棒性,更快检测到衰减型故障[6]。
利用多数表决的方法建立故障诊断和隔离算法,诊断有故障的传感器、保持安全行驶,基于有限状态机逻辑实现该算法[4]。
选择基于系统数学模型的诊断方法,利用状态估计的解析冗余,构造残差向量,不同传感器故障体现在残差向量不同方向上,实现各传感器故障的检测和分离[14]。
3.1.2 电机的故障诊断
采用自适应卡尔曼滤波算法进行参数估计、电机故障诊断,实时监测电枢线圈内阻、电感等电机性能参数,克服了常规卡尔曼滤波器应用于参数时变性较强的线控转向系统时的缺陷[14]。
3.1.3 微处理器的故障诊断
可通过奇偶校验、看门狗定时器等发现有故障的微处理器[3]。
3.2 线控转向系统的故障诊断方法
用粗糙集模型简化冗余信息,抽取分类规则。设计利用粒子群优化方法优化的径向基神经网络,学习冗余信息简化抽取的故障规则。MATLAB仿真表明,智能故障诊断方法提高了诊断精确水平[15]。
基于改善的自适应粒子群优化算法动态改变惯性权重和阈值,根据粒子成熟收敛度和粒子适应度自适应调整粒子的惯性权重,训练神经网络,建立了故障诊断模型。与粒子群优化算法和遗传算法相比,有效改善了神经网络训练效率,获得了较好的诊断结果[16]。
建立滑模观测器进行基于模型的故障诊断和隔离,系统不确定性条件下处理多个传感器故障。为了抑制噪声、传感器输出相互作用、模型不确定性,基于实时、闭环反馈性能设计具有鲁棒自适应观测器的故障诊断和重构策略。硬件在环试验表明精确、可靠的用于在线故障诊断、数据再构[17-18]。
针对有限参数不确定性的线性系统,设计鲁棒的基于模型的故障诊断滤波器。最大化系统和诊断滤波器的理论信道能力,把故障条件视为假定的信道的输入,把产生的分量作为输出,把传感器噪声、干扰、系统输入作为干扰源。产生的余量对故障敏感,对噪声和干扰不敏感[19]。
研究基于滑模观测器的预测故障诊断,设计滑模观测器,利用线性车辆模型、线控转向系统和横摆角速度反馈来估计车辆转向角度。通过长范围预测方法根据估计的转向角度和当前输入预测转向角度。基于非线性滑模观测器、预测的解析冗余降低所需的冗余转向轮转角传感器的数目,保持高可靠性。用持续故障和初始故障评价提出算法的有效性,故障传感器辨识时间随预测水平增加而降低,基于预测的解析冗余算法适合处理单点故障[20]。
4 汽车线控转向系统的展望
4.1 更多试验验证容错与故障诊断技术的效果
汽车线控转向系统容错使得在发生一个部件或子系统故障时仍然实现转向功能。现有的容错与故障诊断技术许多仅通过计算机仿真验证,而没有经过台架试验,尤其是实车试验更少。今后的发展趋势是通过大量的硬件在环台架试验和实车试验验证汽车线控转向系统容错与故障诊断技术的效果,为汽车线控转向系统产业化奠定基础。
4.2 集成线控底盘的容错与故障诊断研究
汽车线控系统的发展趋势是研发集成线控转向、线控制动、线控驱动的线控底盘,采用多传感器信息融合方法,进行线控转向、线控制动、线控驱动的集成容错与故障诊断,完成容错的横摆力矩控制等功能,整体提高线控底盘的可靠性[21]。
5 结 语
汽车线控转向系统带来了转向系统结构和控制等方面的变革,大大优化汽车操纵稳定性、舒适性等性能。提高安全可靠性、降低系统成本是线控转向系统的关键技术,容错技术需要高可靠性的传感器、执行机构等、快速故障诊断算法,发生故障时保持车辆可靠控制。
[1] 吴方圆,孔峰,姚江云.改进LS-SVR在线控转向系统容错控制中的应用[J].计算机工程与应用,2013,49(12):237-241. Wu Fangyuan,Kong Feng,Yao Jiangyun.Improved LS-SVR algorithm and its application on fault-tolerant control of steer-by-wire automobile [J].Computer Engineering and Applications,2013,49(12):237-241.
[2] Plankensteiner M,Silberbauer L,Seethaler C,et al.TTA-group steer-by-wire working group:an initiative to set up a reference architecture for steer-by-wire in off-highway industry [J].SAE Technical Papers,2007,1:1-7.
[3] Anwar S.Fault Tolerant Drive by Wire Systems:Impact on Vehicle Safety and Reliability [M/OL].Dubai:Ebrary Inc,2012.[2013-03-02].http://site.ebrary.com.proxy.lib.umich.edu/lib/umich/detail.action?docID=10558878.
[4] Anwar S,Chen Lei.An analytical redundancy-based fault detection and isolation algorithm for a road-wheel control subsystem in a steer-by-wire system [J].IEEE Transactions on Vehicular Technology,2007,56(5):2859-2869.
[5] Dhahri S,Sellami A ,Ben H F.Robust sensor fault detection and isolation for a steer-by-wire system based on sliding mode observer[C]//Proceedings of the Mediterranean Electrotechnical Conference.Yasmine Hammamet:IEEE,2012:450-454.
[6] Anwar S,Niu Wei.Analytical redundancy based predictive fault tolerant control of a steer-by-wire system using nonlinear observer [C]// Proceedings of the IEEE International Conference on Industrial Technology.Vina del Mar,Chile:IEEE,2010:477-482.
[7] He Lei,Zong Changfu,Wang Chang.A steering-by-wire fault-tolerance control strategy based on multi-dimension Gauss Hidden Markov Model[C]//Proceedings of 2010 International Conference on Intelligent Control and Information Processing.Dalian,China:IEEE,2010:227-230.
[8] Wada N,Fujii K,Saeki M.Reconfigurable fault-tolerant control of a vehicle with a steer-by-wire system [C]//2012 International Conference on Advanced Mechatronic Systems.Tokyo:IEEE,2012:701-706.
[9] Zheng Bing,Altemare C,Anwar S.Fault tolerant steer-by-wire road wheel control system [J].Proceedings of the American Control Conference,2005,3:1619-1624.
[10] He Lei,Yu Zhixin,Zong Changfu,et al.The dual-core fault-tolerant control for Electronic Control Unit of steer-by-wire system[C]//2010 International Conference on Computer,Mechatronics,Control and Electronic Engineering.NewYork:IEEE,2010:436-439.
[11] Kushibik T,Sato Y.Functional safety assessment of the motor vehicles steer-by-wire system with both faults detectable only by demands and commission faults [J].Transactions of the Japan Society of Mechanical Engineers:Part C,2007,762(76):388-396.
[12] He Lei,Zong Changfu,Jiang Guohua,et al.SOC estimation and fault tolerant control method of power battery for steering-by-wire system[J].Journal of Jilin University:Engineering and Technology Edition,2012,42 (1):17-21.
[13] Hayama R,Higashi M,Kawahara S,et al.Fault-tolerant automobile steering based on diversity of steer-by-wire,braking and acceleration [J].Reliability Engineering and System Safety,2010,95(1):10-17.
[14] 张萍.汽车线控转向系统容错控制方法研究[D].长春:吉林大学,2008. Zhang Ping.An Investigation of the Fault Tolerant Control of Vehicle Steer-By-Wire System [D].Changchun:Jilin University,2008.
[15] Wu Fangyuan,Kong Feng,Yao Jiangyun.Intelligent fault diagnosis of steer-by-wire automobile [J].Journal of Computers,2012,7(5):1204-1211.
[16] Meng Yanan,Fu Xiuwei,Fu Li.Application of neural network trained by adaptive particle swarm optimization to fault diagnosis for steer-by-wire system[C]//2010 International Conference on Measuring Technology and Mechatronics Automation.NewYork:IEEE,2010:652-655.
[17] Kheirandish A,Husain A R,Kazemi M S,et al.Robust fault detection and isolation of steer by wire system under various class of fault and system uncertainties [C]//2011 4th International Conference on Modeling,Simulation and Applied Optimization.NewYork:IEEE,2011:1-4.
[18] Song Deyu,Li Qiang,Zou Fenglou,et al.Fault-tolerant control architecture for steering-by-wire system [C]//2008 2nd International Symposium on Intelligent Information Technology Application.NewYork:IEEE,2008:677-681.
[19] 姜国彬.汽车线控转向系统故障诊断方法研究[D].长春:吉林大学,2009. Jiang Guobin.Research of Diagnosis Method for Vehicle Steer-by-Wire System [D].Changchun:Jilin University,2009.
[20] Hasan M S,Anwar S.Sliding mode observer based predictive fault diagnosis of a steer-by-wire system [C]//Proceedings of the 17th World Congress,International Federation of Automatic Control.Dusseldorf,Germany:IFAC,2008.
[21] Yim S.Fault-tolerant yaw moment control with steer- and brake-by-wire device [J].International Journal of Automotive Technology,2014,15(3):463-468.
Fault Tolerant and Fault Diagnosis Technologies of Automobile Steer-by-Wire System
Yu Leiyan
(School of Mechanical & Electronic Engineering, China University of Petroleum (East China), Qingdao 266580, Shandong, China)
Firstly, the basic structure, application area and fault tolerant requirements were analyzed. Then, fault tolerant methods including analytical redundancy methods based on the observation home and abroad research status of key parts of steer-by-wire system including sensors, electronic control units, actuators, communication network and power supplies was researched. Finally, home and abroad research status of fault diagnosis methods of steer-by-wire system were analyzed. The proposed study helps to improve fault tolerant and fault diagnosis ability of steer-by-wire system and to realize mass production of automobile steer-by-wire systems.
vehicle engineering; automobile steer-by-wire system; fault tolerant; fault diagnosis; reliability
10.3969/j.issn.1674-0696.2015.05.33
2013-03-20;
2014-08-12
国家自然科学基金资助项目(51005248,51005115);中央高校基本科研业务费专项资金资助项目(11CX04039A)
于蕾艳(1980—),女,山东烟台人,副教授,博士,主要从事车辆动力学与控制方面的研究。E-mail:yulyx2009@163.com。
U463.4
A
1674-0696(2015)05-165-05
猜你喜欢
一重技术(2021年5期)2022-01-18
汽车之友(2021年23期)2021-12-24
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
电子制作(2018年9期)2018-08-04
电子制作(2018年10期)2018-08-04
汽车工程师(2018年3期)2018-07-12
北京航空航天大学学报(2017年6期)2017-11-23
铁道科学与工程学报(2015年5期)2015-12-24
振动、测试与诊断(2014年5期)2014-03-01
