ADRC串级控制在电加热炉温度控制中的应用研究
2015-06-10 10:50文定都
仪表技术与传感器 2015年6期
文定都
(湖南工业大学电气与信息工程学院,湖南株洲 412007)
ADRC串级控制在电加热炉温度控制中的应用研究
文定都
(湖南工业大学电气与信息工程学院,湖南株洲 412007)
针对工业电加热炉温度具有非线性、大惯性、时滞,并且很难建立精确数学模型的特点,将自抗扰控制技术(ADRC) 应用于EFPT实验装置中,模拟工业电加热炉温控系统,提出了串级自抗扰控制策略。在其外环采用扩张状态观测器、状态误差的非线性反馈、扰动估计补偿相结合的控制方法;在内环采用比例控制,以快速消除干扰。仿真和实验结果表明,该控制方法具有超调小、调节快的优点,系统的鲁棒性和抗干扰能力优于常规串级PID控制方法。
温度控制;串级控制;自抗扰控制;外环;内环;电加热炉
0 引言
在石油、化工、冶金等工业过程中,电加热炉是一种典型的单元操作设备。工业电加热的温度控制系统一般都是大惯性、大时滞系统,而且实际的被控过程往往也是非线性、大延迟、时变不确定的,如果采用常规PID串级控制,往往会出现较大的超调和动态偏差,导致控制作用不及时,因而控制效果不能达到生产工艺的要求。变参数控制、smith预估控制、预测控制、模糊控制或基于神经网络的自适应控制等策略,近年来得到了一些应用[1-6],一定程度上可以有效地克服加热炉对象的大惯性、大迟延特性。但变参数控制参数难于整定,而Smith预估控制存在模型容易失配问题,基于鲁棒性设计的控制器往往趋于保守,基于模糊或神经网络实现的自适应控制器计算量大,控制规律复杂,难以满足实时性要求。因此,迫切需要一种鲁棒性强、算法相对简单的快速控制方案。
自抗扰控制器(ADRC)是中科院韩京清等人在分析经典PID控制器的基础上[7-10],吸取了经典PID和现代控制理论的优点,采用非线性控制律实现优良的控制性能,对被控过程的内扰和外扰进行自动补偿。自抗扰控制技术利用扩张状态观测器把所有未知外扰的非线性、不确定对象用非线性状态反馈化为积分器串联型后,用状态误差反馈来设计出实用的非线性鲁棒控制器。研究表明,自抗扰控制器对非线性、大惯性、不确定性、强干扰、大时滞等复杂系统都具有较好的控制品质,而且它具有算法简单、超调小、收敛快、精度高、抗干扰强、适应性好和鲁棒性强等特点。基于其优点,因此在工业电加热炉控制中提出了基于ADRC串级温度控制的方案。
1 加热炉温度控制装置简介
EFPT-1-0l过程控制装置是一套内容比较丰富的过程实验装置,它可以模拟多种实际工业现场,自行开发多种控制方案,其实物结构如图1所示,其工艺流程如图2所示。
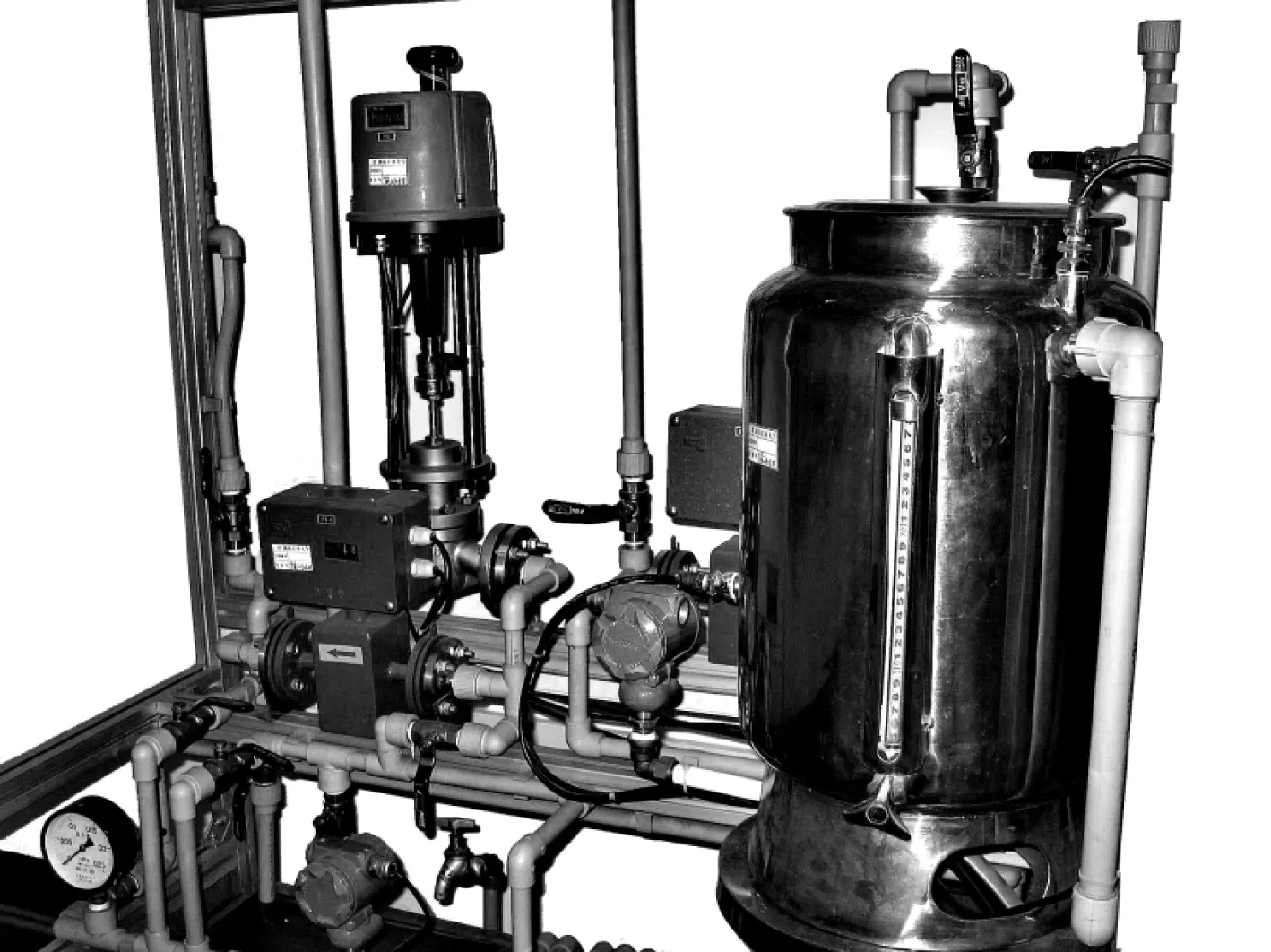
图1 EFPT-1-0l过程控制装置实物图

图2 装置的工艺流程图
本装置包括被控过程系统和控制台2个部分。被控过程系统包括:下位水槽、上位水槽、变频器、电动执行器、电加热锅炉、三相电加热装置、电磁流量传感器、Pt100温度传感器等。控制台主要包括PLC和上位工控PC机。本系统采用PC-6000系列板卡来实现数据采集和系统输出,共使用了3种板卡,分别为PC6326模入接口卡、PC6327A模出接口卡、PC6403开关量输入输出卡,分别控制被控对象的10路模拟量输入,4路模拟量输出和2路开关量输出。用Pt100温度传感器检测锅炉内胆和夹套的水温,经温度变送器送至PLC,通过控制策略计算出控制结果来改变调节阀的开度,从而改变进入夹套里面冷水的流量,实现对锅炉内胆水温的控制。
电加热炉内胆温度-夹套温度串级控制系统原理如图3所示,其中选取内胆温度为主被控参数,夹套温度为副被控参数。主调节器的输出作为副调节器的给定值,即构成了内胆温度-夹套温度的串级控制系统,其方框图如图4所示,图中f1和f2为内外扰动。从图4可知,扰动f1对内胆温度的影响由主温度调节器构成的主控制回路来消除;扰动f2对出口温度的影响要由副温度调节器构成的副回路来消除。采用串级控制主要是为了快速克服扰动,严格控制主被控参数,确保主被控参数能实现无差调节。副被控参数是为主被控参数设置的,允许其在一定范围内波动,因此主、副调节器分别起定值控制、随动控制作用。在该控制方案中,主调节器(主回路)采用ADRC控制,副调节器(副回路)采用P控制。

图3 电加热炉内胆温度-夹套温度串级控制系统原理图

图4 电加热炉内胆温度-夹套温度串级控制系统结构框图
2 ADRC控制器的设计
高阶自抗扰控制器参数众多难以调节,在实际的应用中往往采用低阶自抗扰控制器,下面以二阶自抗扰控制器为例,介绍自抗扰控制算法。
2.1 ADRC 控制原理
图5为二阶自抗扰控制器的一种经典结构图,由3部分组成:微分跟踪器TD,扩张状态观测器ESO和非线性状态误差反馈律NLSEF[7-8]。其中:TD用于安排合理的过渡过程并提取过程合理的微分信号;ESO 用于实时估计对象状态和不确定的内扰和外扰总和并给予补偿的办法;NLSEF 则把TD 产生的跟踪信号和微分信号与ESO得到的系统的状态估计通过非线性函数进行适当组合,输出控制量u。下面就这3个部分的设计分别说明。

图5 典型二阶ADRC的结构图
2.2 非线性跟踪微分器TD
设定的输入信号为v,TD给出它的跟踪信号v1及其微分信号v2,其动态方程为
(1)
式中fst(·)是非线性函数。
d=r·h
y=x1+h·x2
2.3 扩张状态观测器ESO
常用的三阶ESO的动态方程为
(2)
式中fal(·) 为非线性函数
式中:α1,α2,δ,β01,β02,β03,b0要适当选择。z1和z2给出被控对象状态变量x1和x2的估计,而z3则可以估计出模型内扰和外扰的实时总作用量。β03对结果影响很大,β03减小,稳态精度很高,但对扰动的估计滞后较大;但β03增大可能导致振荡。
2.4 非线性状态误差反馈控制律NLSEF
由TD产生的v1及v2与ESO给出的状态估计z1、z2,形成两个误差量e1、e2,然后根据这两个误差的适当非线性函数来产生u0,再根据ESO给出的干扰估计z3和被控对象的已知部分即可形成控制量u。其的表达式为
(3)
式中:β1、β2为比例增益和微分增益。
δ0与被控量的量程和控制精度相关。δ0太小,容易出现颤振现象;太大则ADRC 仅工作在线性区。这里根据被控对象的数学模型特点采用三阶自抗扰控制器。
2.5 ADRC参数选取原则
ADRC需要选取的参数包括:TD的h、r;ESO的α1、α2、δ、β01、β02、β03、b0和NLSEF的β1、β2、α3、α4、δ0。其中:h、α1、α2、α3、α4、δ、δ0为非线性参数,它们的微小变化将会影响到其他参数的整定,因此一般不轻易改变。α1、α2、α3、α4为式(2)和式(3)中的fal的自变量,为了实现小误差大增益、大误差小增益的特性,应取0<α1<1,0﹤α2<1,0<α3<1;为了实现微分误差小时微分增益也小,则取α4>1;而r、β01、β02、β03、b0、β1、β2则可以在线修改。
2.5.1 跟踪微分器(TD)的参数选择
安排过渡过程并合理提取微分信号,有效抑制超调和信号噪声影响。r为跟踪速度因子,参数值越大跟踪速度越快,这需要根据过渡过程的实际需求和系统所能承受的能力决定。h0为离散系统最速控制综合函数的滤波因子,增大可增强滤波效果;h为积分步长,缩小对抑制噪声放大也起很大作用。
2.5.2 扩张状态观测器(ESO)的参数选择
扩张状态观测器是自抗扰控制器的核心,通过扩张的状态对系统的“总和扰动”,即作用于系统的加速度实时值进行估计,并通过该估计信号将系统补偿为积分串联型的线性系统,是对控制系统中出现的各类不确定因素的有效处理方法。扩张状态观测器有7个参数,积分步长h与跟踪微分器相同,据大量文献[10],通常可取α1=0.5,α2=0.25。控制作用施加点的参数b0是与被控对象相关的参数,由被控对象的特性确定,但在实际系统模型未知或不精确时是作为一个调整参数。参数β01,β02,β03的整定对大惯性、大时滞的系统的动态特性影响很大,系统的时滞越大,相应的β01、β02、β03也越大。对扰动估计的快慢主要取决于β03,β03越大估计越快,当系统输出的振荡较大时应适当调小β03。β01、β02过大也会引起估计值振荡,因此它们应协调调整。线性ESO参数整定方法较为确定,但非线性ESO参数可按经验进行选择。
2.5.3 非线性状态误差反馈律(NLSEF)的参数选择
NLSEF是利用非线性状态反馈获得高效率的控制作用,从而形成自抗扰控制器的特殊结构,解决了PID调节器的缺陷,增强了系统鲁棒性。在NLSEF中常取α3=0.75,α4=1.5;参数δ0可根据被控量的量程和计算机数据采集的精度以及控制精度选择,一般选δ0=0.5。u0的构成实质为比例微分作用,因此参数β1,β2可按传统PID控制器的比例系数和微分系统的整定规律进行调整。
根据b0可确定β1、β2的初值,b0较大时,β1、β2取较小值,否则反之。当调节速度慢时可以适当增大β1,反之减小β1,调节速度加快同时会引起超调量增大,系统振荡,此时适当增大β2,可以抑制超调,减小振荡。在调试程序过程中,主要调节β03、β1、β2这3个参数,它们可以根据需要调节适当大小。
3 仿真研究
现以EFPT-1-0l过程控制装置中电加热炉温度控制系统为例,通过测量被控对象的阶跃响应曲线,利用切线法,求得的主被控对象和副被控对象的传递函数分别为:
根据电加热炉上述的模型,在MATLAB软件平台上对该串级控制系统进行了单位阶跃仿真[11],其单位阶跃响应如图6所示。从图6可以看出,应用ADRC-P串级控制,系统阶跃响应曲线历经不到100 s,系统输出处于稳定状态,而且无超调。而用传统PID-P串级控制,在近200 s的时候,系统的输出才趋于稳定状态,且有超调。在t= 600 s 时系统加入幅值为0.5 的阶跃扰动时,ADRC-P串级控制几乎没有什么波动,而常规PID-P串级有一定的波动。从仿真结果可知,基于ADRC-P串级控制的方案具有很好的动态响应特性和很强的鲁棒性。

图6 单位阶跃响应曲线
4 实际运行结果
本系统的实验运行曲线如图7所示,图中电加热炉的内胆温度为主被控参数,夹套温度为副被控参数,内胆目标温度为80 ℃。从实验装置实际运行曲线可以清楚地看出,该系统的响应具有较小超调和较短的调节时间,并且温度稳定在(80±0.5)℃。因此ADRC-P串级控制系统显示出较好的控制效果和较高的鲁棒性,能满足实际的要求。
5 结束语
论文给出了ADRC-P串级控制器的设计方法,并将其应用于实验电加热炉温度控制系统中。其仿真研究和实际运行结果表明,该方法与传统的PID-P相比可使系统具有更快的响应速度,同时具有更小的超调量,这不仅能够对电加热炉温度控制系统进行有效控制,而且使得电加热炉温度控制系统具有较强的鲁棒性,提高了控制系统的抗干扰性和控制的准确性,适合应用于具有时变、非线性、大惯性的一类控制系统中,具有较好的推广应用价值。

图7 EFPT-1-0l型过程控制装置中电加热炉的实际运行曲线
[1] 罗及红.基于PID算法的炉窑温度串级控制系统设计.算机测量与控制,2012,20(13):3243-3245.
[2] 张燕红.模糊PID-Smith串级控制在加热炉温度控制系统中的应用.化工自动化及仪表,2012,39(8):979-981.
[3] 刘大易,赵玉晓.电加热炉温度模糊控制系统设计.锅炉制造,2010,22(4):57-60.
[4] 刘悦婷,赵小强.RBF-PID串级控制在加热炉温度系统中的应用研究.自动化与仪器仪表,2011(4):3-5.
[5] 冯冬青,李现旗.基于RBF神经网络的检定炉温度控制系统.仪表技术与传感器,2014(1):61-63.
[6] 孙建平,齐园园.动态矩阵控制在电加热炉温度控制中的应用.计算机仿真,2013,30(6):386-388.
[7] 韩京清.自抗扰控制技术.北京:国防工业出版社,2008:5-200.
[8] 韩京清.自抗扰控制技术—估计补偿不确定因素的控制技术.北京:国防工业出版社,2009:200-256.
[9] 黄一,薛文超.自抗扰控制:思想、应用及理论分析.系统科学与数学,2012,32(10):1287-1307.
[10] 薛文超.自抗扰控制的理论分析:[学位论文].北京:中国科学院数学与系统科学研究院,2012.
[11] 刘金琨.先进PID控制MATLAB仿真.3版.北京:电子工业出版社,2011:117-228.
Applied Research of ADRC Cascade Control in Temperature ControlSystem of Electric Furnace
WEN Ding-du
(College of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou 412007 China)
To solve the problem that the temperature of the industrial electric furnace is nonlinear,time-varying and time delayed,and it is difficult to establish accurate mathematical model,active disturbance rejection control(ADRC) was applied to EFPT experiment device,and the cascade ADRC was proposed for simulation industrial electrical furnace temperature control system.The outer loop control combined the extended state observer,nonlinear feedback of state difference and disturbance estimation compensation;The inner loop control adopted the proportional control to quickly eliminate disturbance.Simulation and experimental results show that the proposed control method makes the extra-regulation smaller,the regulation time shorter,and the system’s robustness and antijamming ability are superior to the conventional cascade PID control method.
temperature control;cascade control;active disturbance rejection control(ADRC);outer loop;inner loop;electrical furnace
湖南省科技厅科研项目(2012FJ4266);湖南省教育厅科研项目(14C0327)
2014-08-09 收修改稿日期:2014-05-25
TP273
A
1002-1841(2015)06-0059-04
文定都(1969—),教授,工学硕士,主要研究领域:智能控制理论及应用、检测技术及自动化装置、计算机控制。 E-mail:wdd2008@163.com
猜你喜欢
江苏钢铁(2022年9期)2022-07-02
家用电器(2022年4期)2022-04-25
粉末冶金技术(2021年3期)2021-07-28
化工管理(2021年7期)2021-05-13
紫禁城(2020年9期)2020-10-27
环球时报(2020-08-11)2020-08-11
中国特种设备安全(2019年1期)2019-03-13
儿童故事画报·发现号趣味百科(2017年1期)2017-06-01
中学科技(2006年1期)2006-03-23