
高空作业车液压系统故障诊断的研究
2015-06-09 12:33张卫亮王彦平胡宇凯陈娇阳刘晓娟
机械与电子 2015年8期
张卫亮,王彦平,刘 科,胡宇凯,陈娇阳,刘晓娟
(宝鸡文理学院机械工程学院,陕西宝鸡 721016)
高空作业车液压系统故障诊断的研究
张卫亮,王彦平,刘 科,胡宇凯,陈娇阳,刘晓娟
(宝鸡文理学院机械工程学院,陕西宝鸡 721016)
0 引言
高空作业车液压系统主要是由回转和变幅装置液压回路、作业臂伸缩装置液压回路、工作平台调平液压回路、扩桥和转向装置液压回路等组成[1],其中变幅和回转装置液压回路使用频率较高,液压回路较为典型。因此选择该回路进行故障诊断研究。液压系统故障树可以直观的反映液压系统故障的成因与形成过程,但是对于复杂液压系统仅仅通过故障树往往很难排除故障。因此在建立变幅和回转液压系统故障树之后,通过对回路若干关键点参数变化进行在线监测,当液压系统故障时,通过分析关键点参数变化结合故障产生原因的故障树,实现对液压系统故障的快速排除[2]。
1 变幅和回转工作原理分析
1.1 高空作业车变幅和回转结构工作原理
为了对高空作业车变幅和回转液压系统的故障进行快速诊断和处理,首先必须掌握其工作原理。为了使高空作业车的作业范围更大,要求作业过程中伸出臂可以相对于底盘回转,为了实现该功能,将作业臂固定在转台上,底盘和转台通过回转液压系统,实现转台的360°回转。高空作业车变幅机构主要用于在工作过程中调整作业臂的位置,将变幅液压缸两端分别铰接在转台和作业臂上,通过变幅液压回路,实现伸缩臂的变幅动作[1,3]。
1.2 变幅和回转液压系统工作原理
变幅和回转装置液压系统原理如图1所示,平衡组是为防止油管破裂或严重泄漏导致变幅液压缸的突然动作,并且确保进入变幅液压缸的油液有一定的压力,使整个变幅运动过程平稳。比例流量阀和差别感应阀共同组成流量控制装置,实现恒流量控制,确保进入液压缸的液压油压力恒定。

图1 变幅和回转装置液压系统原理
a.变幅液压系统工作原理。当图1中电磁换向阀1通电、电磁换向阀2断电时,液压油由图中箭头位置流经电磁换向阀1的上位,进入变幅液压缸的下腔,液压缸伸出,变幅角度增加,变幅液压缸上腔油液经平衡阀组和电磁换向阀2下位回油;当图1中电磁阀换向阀1断电、电磁换向阀2通电时,液压油由图中箭头位置流经电磁换向阀2的上位,进入变幅液压缸的上腔,变幅液压缸缩回,变幅角度减小,下腔油液经平衡阀组和电磁换向阀1下位回油。
b.回转液压系统工作原理。当图1中三位四通电磁换向阀上位接入回路时,液压油由图中箭头位置通过平衡阀组,并在梭阀两侧产生压差,控制液压油经过图示虚线,使制动装置解除对马达制动作用,马达在液压油压力作用下回转,实现转台的转向;当图1中三位四通电磁换向阀下位接入回路时,液压油由图中箭头位置通过平衡阀组,并在梭阀两侧产生压差,控制液经过图示虚线,使制动装置解除对马达制动作用,马达在液压油的压力作用下反向回转,实现转台的反向转向。
1.3 关键点参数监测
掌握高空作业车工作原理之后,要对高空作业车液压系统故障进行定性和定量分析,仪器检测法的思想是对整个系统关键点参数用仪器进行监测,通过对比关键点发生故障和正常工作时候参数的变化,快速查找并且处理故障。
分析变幅和回转液压系统之后,选择表1所示10个关键监测点,分别监测回路的压力和温度,依此对高空作业车变幅和回转液压系统进行分析。压力选择DST标准型压力传感器,温度传感器选择TCT温度传感器,油箱油液高度测量选择普通的接触式液位传感器。

表1 变幅和回转液压系统关键点参数监测
2 故障树的建立
故障树是一种常用的处理系统故障的逻辑分析法,主要用于分析复杂系统可靠性和安全性,建立故障树首先要确定顶事件,一般把系统最可能出现的故障作为顶事件,然后根据液压系统工作原理和实际经验,将导致顶事件发生的原因 “自上到下逐级分解”,这就形成了一种倒立的树状结构图,称为液压系统故障树[4]。
2.1 变幅液压系统故障树的建立
根据故障树的建立步骤,查阅资料,得到变幅液压系统故障树如图2所示,符号含义为[5-6]:
a.顶事件T。变幅液压缸上升动作无力。
b.中间事件。M1液压缸故障;M2进入液压缸的油液和压力不足;M3回油不通;M4电磁换向阀3故障;M5平衡阀2中的溢流阀内泄过大;M6液压泵故障;M7电磁阀3电气故障;M8电磁阀3机械故障;M9电磁阀4电气故障;M10电磁阀4机械故障。
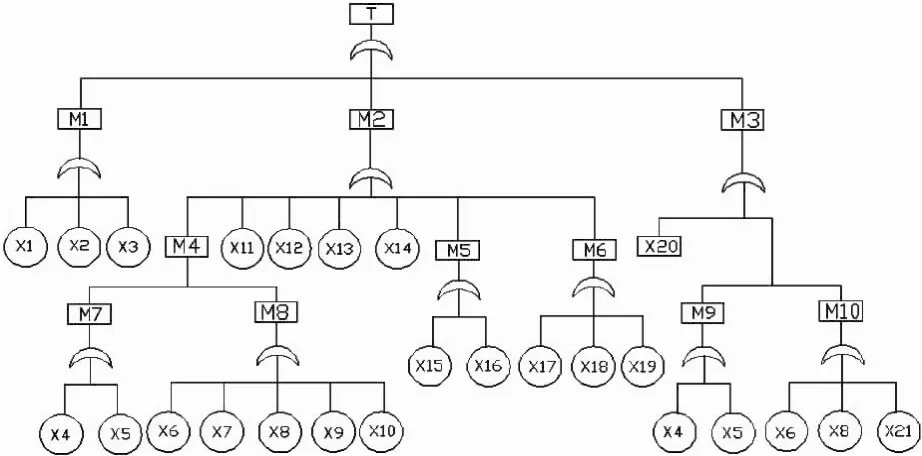
图2 高空作业车变幅液压系统故障树
c.底事件。X1液压缸磨损内泄增大;X2液压缸和活塞变形卡住;X3液压油过脏,活塞被异物卡住;X4电气线路故障;X5电磁线圈烧坏;X6阀芯阀体配合间隙太小,阀芯移动不到位;X7弹簧失效使阀芯行程不足;X8油液过脏,阀芯异物卡住;X9油温过高,阀芯阀体热变形卡住;X10阀体阀芯磨损严重;X11比例流量阀故障;X12滤油器堵塞;X13平衡阀中的单向阀卡死在小开度位置;X14差别感应阀故障;X15滑阀和阀体配合间隙增大;X16密封件损坏;X17液压泵进油口密封不良;X18油箱油量不足,泵吸空;X19液压泵磨损造成内泄;X20平衡阀中溢流阀阻尼孔堵塞;X21弹簧失效,阀体行程不足。
2.2 回转液压系统故障树的建立
回转液压系统故障树如图3所示,符号含义为:a.顶事件T。回转马达未工作。
b.中间事件。M1回转马达供油不足;M2回油不通;M3平衡阀中的溢流阀内泄过大;M4液压泵故障;M5电磁阀故障;M6电磁阀7电气故障;M7电磁阀7机械故障。
c.底事件。X1马达故障;X2制动装置故障;X3梭阀故障;X4平衡阀组中单向阀卡死在小开度位置;X5滑阀与阀体配合间隙增大;X6密封件损坏;X7比例流量阀故障;X8差别感应阀故障;X9液压泵进口密封不良;X10油箱油量不足;X11液压泵磨损;X12电气线路故障;X13电磁线圈损坏;X14阀芯阀体配合间隙太小;阀芯移动不到位;X15弹簧失效使阀芯行程不足;X16油液过脏,阀芯异物卡住;X17油温过高,阀芯阀体热变形卡住;X18阀体阀芯磨损严重;X19平衡阀中溢流阀阻尼孔堵塞。

图3 高空作业车回转液压系统故障树
2.3 最小割集
引起一个系统顶事件发生的基本事件最低限度集合称为最小割集,通过最小割集可以定量分析顶事件发生的概率,图2和图3所示的液压系统故障树只有或门,根据最小割集的布尔代数运算规则,可以求得最小割集为所有底事件的集合,变幅液压缸上升动作无力故障最小割集为{X1},{X2},{X3},{X4},{X5},{X6},{X7},{X8},{X9},{X10},{X11},{X12},{X13},{X14},{X15},{X16},{X17},{X18},{X19},{X20},{X21}。回转马达未工作故障最小割集为{X1},{X2},{X3},{X4},{X5},{X6},{X7},{X8},{X9},{X10},{X11},{X12},{X13},{X14},{X15},{X16},{X17},{X18},{X19}。即底事件集合任何元素的发生都会引起顶事件发生。
3 故障在线监测
由以上最小割集分析得到“任何一个底事件发生都会导致顶事件故障”,因此导致顶事件故障的原因可能具有多样性,此外,液压油在封闭管路中流动,故障发生位置隐蔽,仅通过故障树定性分析很难找出故障点。为了快速排除高空作业车液压系统故障,必须在定性分析的基础上,通过传感器、调理电路、A/D转换器、控制器、显示器等元件,将工作过程中关键点的压力、温度、液位等参数显示在液晶显示器上,当液压系统发生故障时,通过液晶显示器上面的参数,结合故障树对液压系统故障进行诊断,快速找出故障位置和故障元件。故障在线监测原理如图4所示。A/D转换器选择2块A/DC0809模数转换芯片,A/DC0809有8路模拟输出(IN0~IN07)和8路数字输出(D0~D7),10个传感器监测信号经调理电路,分别接2块模数转换芯片的IN0~IN04模拟信号输入端,每个模数转换芯片预留(IN5~IN07)共6个端口。控制器选择1块AT89S51单片机芯片,经过A/D转换的10路数字信号接单片机8个P0端口和2个P1端口。
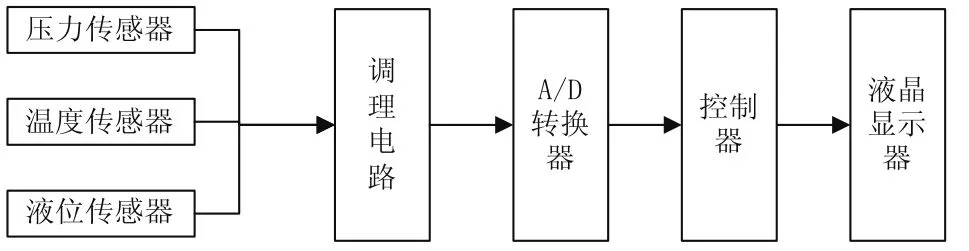
图4 故障在线监测原理
4 应用实例
故障:变幅液压缸上升动作无力。
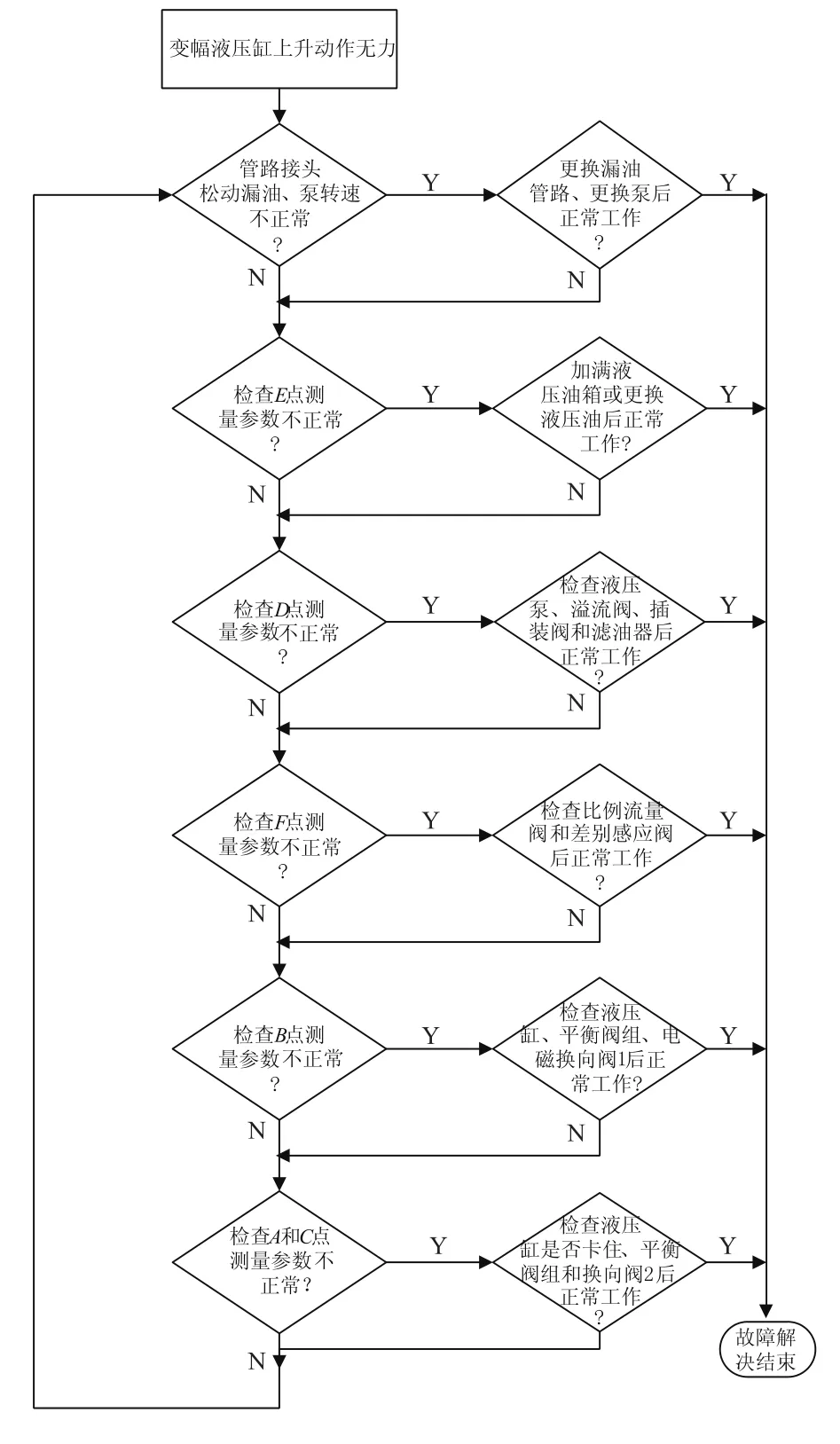
图5 故障诊断流程
故障诊断步骤:由变幅液压系统故障树和最小割集可知,底事件X1~X21任何一个发生,都会导致变幅上升动作无力,因此很难确定故障的实际位置。根据故障诊断“由外到内”的原则,故障诊断流程如图5所示,在确定故障点之前,首先检查各管路接头是否漏油,泵转速是否正常,如果发现管路漏油或者泵转速过低,则更换损坏管路和调整泵转速到合理范围,如果故障解决,结束故障诊断,否则在液晶显示器上检查监测点E参数(油箱油液高度和温度),如果E点参数异常,则给液压油箱加满液压油或者更换液压油,再次启动查看故障是否解决,如果故障解决,结束诊断,否则检查D点监测参数(泵出口压力),由故障树可知D点参数异常可能是由于滤油器堵塞,液压泵、插装阀和溢流阀等故障引起,因此排除这些原件故障后,如果恢复正常工作,结束故障诊断,否则检查F点监测参数(比例流量阀出口的压力),如果F点监测参数异常,由故障树可知应该检查比例流量阀和差别感应阀是否存在故障,排除比例流量阀和差别感应阀故障后,如果恢复正常工作,就结束诊断,否则检查B点监测参数(液压缸入口的压力),如果B点监测参数异常,由故障树可知应该检查液压缸1、平衡阀组和电磁换向阀1是否存在故障,排除故障后高空作业车可以正常工作,就结束诊断,否则检查A(液压缸出口的压力)和C(回油压力)点监测参数,如果异常,回油不通,排除平衡阀组、液压缸和换向阀2故障后,恢复正常工作,结束诊断,否则重新排查故障。
5 结束语
由以上故障诊断应用实例发现,通过故障树和在线监测相结合的方式,对高空作业车液压系统进行故障诊断,能够快速发现液压系统在工作过程中的故障,提高了诊断效率,缩短了诊断时间。故障树主要是帮助维修人员直观认识故障产生的逻辑关系,在线监测结果则用于确定故障位置。准确分析故障树,合理选择关键监测点,则可以对任意复杂液压系统进行诊断,因此具有很好的推广价值。
[1] 马玉良.TLK21型高空作业车电液控制系统研究[D].秦皇岛:燕山大学,2007.
[2] 孙立峰,吕枫.工程机械液压系统分析及故障诊断与排除[M].北京:机械工业出版社,2014.
[3] 郭磊.基于CAN总线的自行直臂式高空作业车控制系统研究[D].西安:长安大学,2010.
[4] 何庆飞,王汉功,陈小虎.故障树分析法在汽车起重机液压系统故障诊断中的应用[J].机床与液压,2008,36(2):196- 198.
[5] 朱烈舜.公路工程机械液压系统故障排除[M].北京:人民交通出版社,2005.
[6] 苏欣平,吴学深,杨成舜.基于故障树的叉车液压系统故障诊断研究[J],机床与液压,2011,39(17):138 -139.
Aerial Working Platform Hydraulic System Fault Diagnosis Research
ZHANG Weiliang,WANG Yanping,LIU Ke,HU Yukai,CHEN Jiaoyang,LIU Xiaojuan
(Institute of Mechanical Engineering,Baoji University of Arts and Sciences,Baoji 721016,China)
对高空作业车的结构和工作原理进行分析,在此基础上建立变幅和回转液压系统故障树,并对变幅和回转液压系统回路关键点参数进行在线监测。建立变幅和回转液压系统故障树,对故障产生的原因进行定性分析。利用传感器、单片机、液晶显示器等监测回路关键点参数变化,通过监测参数对液压系统故障进行定量分析。通过故障树和监测结果,快速排除高空作业车在工作过程中的故障。该方法可以帮助维修人员快速查找液压系统故障,为其他液压系统故障诊断的研究提供参考。
高空作业车;液压故障树;在线监测;传感器
The structure and working principle of the aerial working platform is analyzed,on the basis of the establishment of amplitude and slewing hydraulic system fault tree.The amplitude and slewing hydraulic system key parameters are monitored online.An amplitude and slewing hydraulic system fault tree is established and the qualitative analysis of the causes of failure.Use of sensor,microcontroller,liquid crystal display monitor circuit key parameters,such as change,through monitoring the parameters for quantitative analysis of the hydraulic system failure are analyzed.Through the fault tree and monitoring results,quickly ruled out the fault in the process of overhead working truck at work.The method can help maintenance personnel to quickly find hydraulic system fault, provide a reference for others researching hydraulic system fault diagnosis.
aerial working platform;hydraulic system fault tree;on- line monitoring;sensor
TH113.2
A
1001- 2257(2015)08- 0064- 04
张卫亮 (1986-),男,陕西宝鸡人,助教,研究方向为机电液一体化。
2015-02-12
宝鸡文理学院校级项目(201410721010)
猜你喜欢
防爆电机(2022年4期)2022-08-17
农业装备与车辆工程(2021年10期)2021-11-03
北京航空航天大学学报(2019年8期)2019-09-10
电子制作(2018年19期)2018-11-14
河南工学院学报(2017年1期)2017-06-07
工业设计(2016年6期)2016-04-17
汽车维护与修理(2016年3期)2016-02-28
陕西师范大学学报(自然科学版)(2015年4期)2015-10-29
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年5期)2015-02-28
