半车主动悬架系统模糊PID控制器设计及仿真
2015-06-09 06:23:57兰文奎李仕生
重庆交通大学学报(自然科学版) 2015年2期
兰文奎,李仕生
(重庆工业职业技术学院 汽车工程学院,重庆 401120)
半车主动悬架系统模糊PID控制器设计及仿真
兰文奎,李仕生
(重庆工业职业技术学院 汽车工程学院,重庆 401120)
基于车辆动力系统模型,设计了针对车辆平顺性的4自由度车辆主动悬架系统半车模型。针对提高车辆平顺性设计了模糊控制规则库,并将模糊控制逻辑结合到PID控制当中,设计了主动悬架系统的模糊PID控制器。通过MATLAB / Simulink仿真分析了基于模糊PID控制器的主动悬架与被动悬架的性能。仿真结果表明:设计的模糊PID控制器,能显著降低车身加速度和俯仰角,提高主动悬架的平顺性。
车辆工程;模糊-PID;主动悬架控制器;设计;仿真性
汽车制造商在设计先进悬架系统时要考虑诸多因素,其中平顺性是悬架系统设计时考虑的最重要因素之一。由螺旋弹簧和油液减振器组成的被动悬架系统,具有结构简单成本较低的特点。但由于其阻尼力无法控制,性能受到了限制。国内外学者对通过减少传动振动和保持适当的轮胎接触提高车辆悬架系统的性能进行了研究,研究表明主动悬架系统比传统的被动悬架系统具有更好的平顺性[1-3]。
基于汽车动力系统模型开发了半悬架系统的4自由度模型。从提高系统舒适性目的出发,提出了模糊控制逻辑的规则库,设计开发了结合模糊控制逻辑的PID控制器。最后,以路面阶跃输入作为激励对系统进行了仿真计算,对比了主动悬架和被动悬架性能的差异,分析了悬架位移的均方根值和车辆轮胎的动载荷。结果表明:使用了模糊PID控制器的主动悬架系统比传统的被动悬架系统具有更好的平顺性。
1 主动悬架系统的数学模型
图1为1/2的悬架系统模型。模型有4个自由度,即簧上质量(车身质量)的竖直和俯仰运动及两端的非簧载质量(前轮和后轮)的垂直运动[4]。位于簧载质量和非簧载质量之间的悬架系统简化为线性黏滞阻尼器和弹簧单元,轮胎则简化为简单的线性弹簧无阻尼元件。
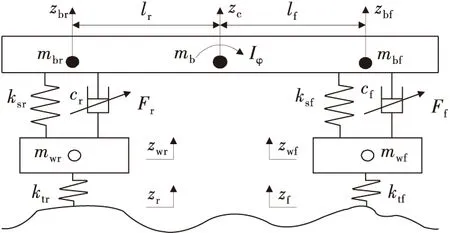
图1 主动悬架半车模型Fig.1 Half vehicle model with active suspension
半车模型的符号如图1。mb是半车模型的质量;mwf和mwr分别为前轮和后轮质量;lf和lr分别是前轴和后轴到重心之间的距离;Iφ是俯仰转动惯量;cf和cr是前后轮的阻尼系数;ksf和ksr是前后悬架的弹簧刚度;ktf和ktr是前后轮的轮胎刚度;Ff和Fr是前后轮的执行力;zwf和zwr是前后轮的垂向位移;zf和zr是前后轮的路面输入位移;zc是车身质心处的垂向位移;zbf和zbr是前后车身的垂直位移。
给定一个假设的俯仰角,簧载质量的垂直位移可以表示为:
zbf=zc-lfsinφ≈zc-lfφ
zbr=zc+lrsinφ≈zc+lrφ
(1)
基于拉格朗日方程,半车模型的位移微分方程可以表示为:

(2)
(3)
(4)
-Ff
(5)

(6)
2 模糊PID控制器设计
2.1 模糊PID控制器的结构
PID控制器具有结构简单、清晰且易于实现的功能,被广泛的应用于工业控制领域。然而,由于传统的PID控制器在优化参数和适应工作条件上存在不足,使其很难达到理想的控制效果[5]。模糊PID控制器将模糊控制算法集合到传统的PID控制来提高悬架系统的平顺性。
图2为模糊PID控制器。将模糊推理模块添加到常规PID控制器中,根据悬挂系统动力学方程自适应地调整增益参数。模糊推理模块的结构有2个输入和3个输出,偏差量(E)和偏差变化(EC), 输出是PID控制器的增益参数Kp,Ki和Kd。
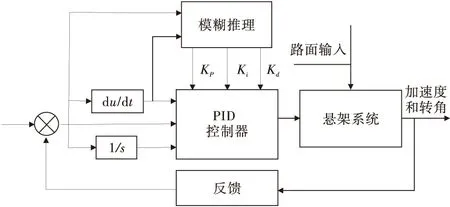
图2 模糊PID控制器的构成Fig.2 Configuration of fuzzy-PID controller
2.2 模糊逻辑控制设计
模糊逻辑控制器设计过程包括模糊化、模糊推理和去模糊化三个过程[6]。模糊化过程就是使系统的输入和输出通过语言规则形式表达,简单的语言规则可以表达复杂的系统。
在4自由度主动悬架系统的模糊逻辑控制器中,系统速度误差E和速度误差的变化率EC作为控制器的输入变量,以其变化范围来定义模糊集的论域。两个输入模糊集里有5个单元,即:
E={-2,-1,0,1,2}
EC={-2,-1,0,1,2}
两个变量对应的模糊子集相同,为:
增益参数Kp(比例系数调教参数),Ki(积分系数调教参数)和Kd(微分系数调教参数)的3个输出变量的模糊集论域为:
Kp,Ki,Kd={0,0.5,1,1.5,2,2.5,3,3.5},其模糊子集包括
采用三角隶属度函数将这些输入和输出转化为语言控制变量,使用Sλ作为比例因子。下标λ=E,EC用来描述偏差量和偏差变化,将它们分别匹配到统一语句。上标λ=p,i,d,用来表达增益参数Kp,Ki,Kd。给出这些隶属函数,可以呈现推理组合规则。一个模糊逻辑控制器按照下面形式的模糊if - then规则构成:

模糊逻辑控制的规则库的特点是基于典型人类情景经验的语言描述规则集。它准确的表现了人类在思考和执行后的经验,即人类怎样进行高性能的控制。模糊PID控制选取模糊控制规则库的原则是:
1)当车身加速度偏差绝对值|e|较大时,为使系统具有良好的快速跟踪性能, 应取较大的KP与较小的Kd,同时为避免系统响应出现较大的超调, 应对积分作用加以限制,可令Ki为0 或较小值。
2)当车身加速度偏差绝对值|e|处于中等大小时,为使系统具有较小的超调,应取中等的KP,此时的取值较大Kd。
3)当车身加速度偏差绝对值|e|较小时,为使系统有较好的稳态性能,KP应较小,Ki应取得大些。

为提高主动悬挂系统舒适性的模糊控制规则如表1。

表1 模糊逻辑规则库
图3是3D规则库脉谱云图,图3定义了模糊逻辑控制器的2个输入和3个输出之间的关系。
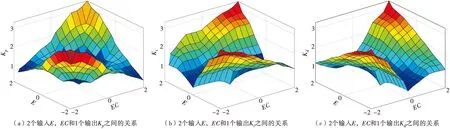
图3 模糊规则库3D脉谱云图Fig.3 3D cloud map of fuzzy rules base
反模糊化是模糊化的反向过程,是从模糊集合中取一个最佳代表模糊推理结果可能性的精确值的过程。重心法也成为质心法或面积重心法,是所有解模糊化方法中最为合理、最流行的方法,该方法虽然计算复杂,但是包含了输出模糊子集所有元素的信息,较为精确。为最大实现本文中使用的去模糊化方法是重心法[7]。
3 仿真与分析
为验证模糊PID控制器的控制性能,对应用了控制器的主动悬架系统和被动悬架的性能进行了仿真对比。给车轮一个路面阶跃激励,路面激励输入方程为:
(7)
表2中是用于计算机仿真的物理参数值。
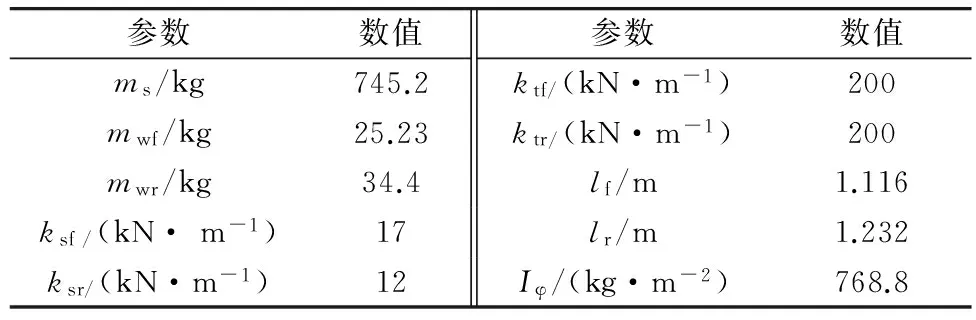
表2 车辆模型参数
图4是使用了模糊PID控制器的主动悬架系统和被动悬架系统簧载质量的车身加速度、俯仰角、悬架动载荷及动挠度。可以清晰的看到,使用模糊PID控制方法主动悬架比被动悬架在车身加速度有明显的改善,同时模糊PID控制器通过降低前后车身的加速度提高了车辆平顺性。与被动悬架系统的仿真结果相比,主动悬架系统簧载质量的最大垂直加速度下降了54.72%,最大的俯仰角降低达53.57%。
主动悬架的动载荷变化量以及动挠度变化量都要要比被动悬架的要略大一些,但是本控制系统的主要控制目标是车辆的舒适性(也就是车身加速度),以上两个变量的变化范围在悬架性能允许范围之内,因此,控制系统的仿真结果是可以接受的。

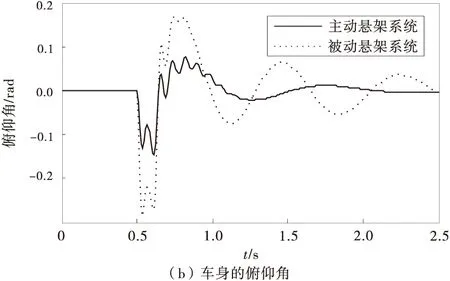
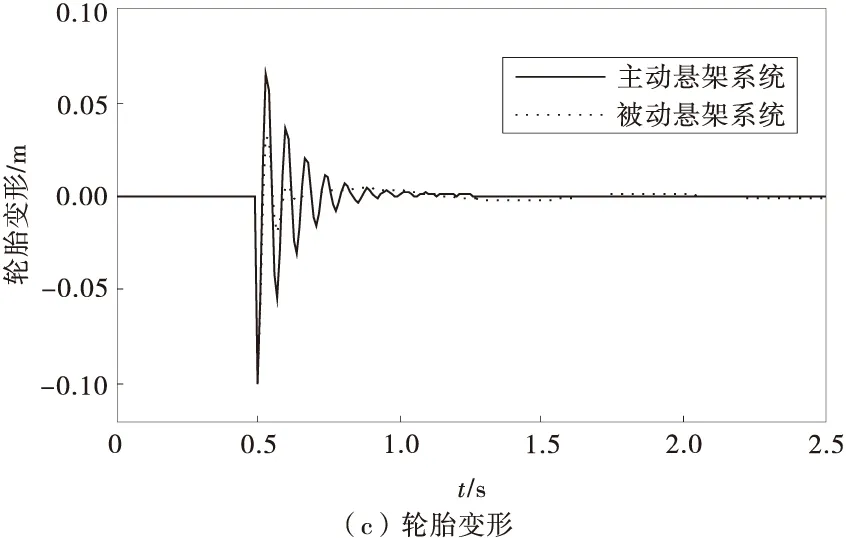
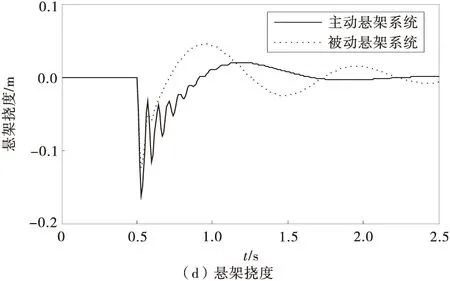
图4 仿真结果Fig.4 Simulation results
因为轮胎变形和悬架挠度与车辆的操控性能相关,表3分别给出了被动悬架系统和模糊PID控制方法的前后车轮变形和悬架挠度。当模糊PID控制器在主动悬架上发生作用时,模糊PID控制方法提供了更小的前悬架和后悬架挠度。与被动悬架相比,当控制器在4自由度半车主动悬架模型的前后部分作用时,轮胎的变形更大,操控性变差。

表3 悬架系统仿真计算值
5 结 论
将模糊PID控制逻辑集成到传统PID控制器,开发了模糊PID控制器,设计了用于提高系统平顺性的模糊控制规则,并应用于控制半车模型4自由度的主动悬架系统。与被动悬架相比,主动悬架系统的模糊PID控制器能够有效的降低由于路面阶跃激励的车身加速度峰值,控制策略能够明显的提高车辆的平顺性能。
[1] 兰文奎,袁苗达,张晋源.磁流变减振器结构设计与试验研究[J].重庆交通大学学报:自然科学版,2013,32(1):122-125. Lan Wenkui,Yuan Miaoda,Zhang Jinyuan.Structural design and test study of MR damper[J].Journal of Chongqing Jiaotong University:Natural Science,2013,32(1):122-125.
[2] Sharkawy A B.Fuzzy and adaptive fuzzy control for the automobiles’ active suspension system[J],Vehicle System Dynamics,2005,43(11):795-806.
[3] Biglarbegian M,Melek W.Golnaraghi F.A novel neuro-fuzzy controller to enhance the performance of vehicle semi-active suspension systems[J].Vehicle System Dynamics,2008,46(8):691-711.
[4] Du H,Zhang N.Designing H8/GH2 static-output feedback controller for vehicle suspensions using linear matrix inequalities and genetic algorithms[J].Vehicle System Dynamics,2008,46(5):385-412.
[5] Carvajal J,Chen G R,Ogmen H.Fuzzy PID controller:design,performance evaluation,and stability analysis[J].Information Sciences,2000,123:249-270.
[6] Cao J T,Li P,Liu H H.An extended fuzzy controller for a vehicle active suspension system[J].Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2010,224(6):717-733.
[7] Yu Miao,Choi Seung-Bok,Dong Xiaomin,et al.Fuzzy neural network control for vehicle stability utilizing magnetorheological suspension system[J].Journal of Intelligent Material Systems and Structures,2009,20:457-466.
Design of Fuzzy-PID Controller for a Half-Vehicle with Active Suspension System
Lan Wenkui,Li Shisheng
(Faculty of Vehicle Engineering, Chongqing Industry Polytechnic College,Chongqing 401120,China)
A fuzzy-PID controller was developed to the active suspension system for the ride comfort enhancement of a half-vehicle model of a four degree-of-freedom based in vehicle dynamical model. A fuzzy-PID controller was developed by incorporating the fuzzy logic control mechanism into the PID structure focused on the passenger’s ride comfort performance.The performance of the proposed controller has been verified by comparing it with passive control method in MATLAB/Simulink. The simulation results indicate that the developed fuzzy-PID controller enhances the ride comfort performance of the vehicle active suspension system by reducing the body acceleration and pitch angle significantly.
vehicle engineering; fuzzy-PID; active suspension controller;design;simulation
10.3969/j.issn.1674-0696.2015.02.32
2012-11-13;
2013-03-11
重庆市教委科技项目(KJ1403005);重庆工业职业技术学院科技项目(GZY201312-YK)
兰文奎(1981—),男,宁夏银川人,讲师,硕士,主要从事汽车系统动力学及控制方面的研究。E-mail:lanwk@163.com。
TP273
A
1674-0696(2015)02-148-04
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
装备制造技术(2020年2期)2020-12-14 03:09:28
现代装饰(2020年7期)2020-07-27 01:27:50
运筹与管理(2019年10期)2019-12-17 06:07:12
今日农业(2019年12期)2019-08-15 00:56:32
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38
汽车与新动力(2012年5期)2012-03-25 10:09:44