一种基于半监督学习的窄带雷达目标识别系统
2015-06-07 05:53吴剑旗田西兰
中国电子科学研究院学报 2015年1期
吴剑旗,田西兰
(中国电子科技集团公司第38研究所,合肥 230088)
工程与应用
一种基于半监督学习的窄带雷达目标识别系统
吴剑旗,田西兰
(中国电子科技集团公司第38研究所,合肥 230088)
半监督学习算法利用少量的标注样本与大量的未标注样本进行模式识别问题中的样本分布探索。针对常规雷达目标识别系统中,样本难以准确标注、模板库建立复杂以及建立过程漫长的问题,采用半监督学习算法以减少模板库的建设代价,并启用多核学习来进行目标特征的自动选择。基于窄带飞机目标分类识别的数据分析表明,与基于监督学习算法的常规识别系统相比,所提的目标识别系统能够获得更高的分类准确率。
窄带雷达目标识别;半监督学习;多核学习;TSVM-MKL
0 引 言
雷达目标识别基于回波信号提取目标特征,实现目标属性类别或类型的自动判定。该技术是集传感器、目标、环境和信号处理技术为一体的复杂的系统工程[1]。目标识别因其在军事预警、气象探测和地质勘探[2]等领域的应用价值而备受关注。近期我国划定的东海及南海防空识别区屡屡受到美国、日本等国的挑衅,也使对目标识别的需求空前迫切。
目标识别源于模式识别,并大量继承了模式识别的基本理论和设计方式。近年来,国内外目标识别理论研究和实际应用较为成功的方法主要分为以下几类:(1)基于目标回波起伏特性和调制谱特征的识别[3];(2)基于极点分布的目标识别[4];(3)基于极化特征的识别[5];(4)基于高分辨雷达成像的识别[6]。这些研究多集中于提取与选择反映目标属性的特征、模板库的建立、分类器的设计和匹配决策上。该类研究方法导致识别系统的性能很大程度上取决于准确标注的样本回波和大规模的模板库建设:一方面,大多数目标特征,如低分辨窄带调制特征和高分辨一维距离像特征,都密切依赖于雷达的工作参数、作用环境、目标自身姿态和运动方式。因此,模板库的建设方法复杂,建立过程极为漫长;另一方面,由于军事保密及不明目标的非合作性等原因,大多数雷达即使能够跟踪并完成相关特征的提取工作,也难以对获取的特征进行准确的类型或型号标注,这也在一定程度上影响了目标识别系统的整体性能。因此,研究对大规模模板库依赖性弱的目标识别系统在实际应用中具有重大的意义。
相关目标识别的研究通常由两方面展开:一方面,探索新的特征以削弱其姿态敏感性及工作频段敏感性[5-9],目前多数研究属于此方向;另一方面,探索新的分类识别算法以减少对训练样本数量及质量的依赖[10-11]。半监督学习 (Semi-supervised Learning)算法是近年来模式识别领域研究的重点问题[12],主要考虑如何利用少量的标注样本和大量的未标注样本进行训练和分类的问题。该类方法对于减少标注代价,提高识别系统性能具有重大的实际意义,已在文本检索[13]、脑机接口[14]、SAR目标识别[15]等领域有着成功的应用。
综合以上信息,解决目标识别研究中目标回波难以标注,模板库建立方法复杂、过程漫长的问题,采用半监督学习以有效利用目标识别中的少量合作目标的标注特征和大量非合作目标的未标注特征是一个有效的解决途径。本文采用半监督多核学习算法以匹配目标识别中未知的特征分布,即利用多个核机器的同时训练以完成对各类已知目标特征分布的自动匹配,并基于序贯最小优化(SMO,Sequential Minimal Optimization)方法进行半监督多核学习算法的在线化实现,在小样本的情况下完成对非合作类目标的准确识别。仿真结果表明了本文所提算法的有效性。
1 窄带雷达目标识别
窄带雷达目标识别因其资源需求少、现有系统架构可继承性高、对模板库依赖性小等优点而在新型雷达设计和老雷达改造任务中具有良好的应用价值。目前,窄带雷达目标识别已在防空、反导、对海处理等领域积累了一定的研究基础,该技术可保证雷达在目标视距外获得相对准确的目标特性,并进一步支撑非合作目标的威胁等级判定与情报分析。因其巨大的军事价值与应用前景,窄带雷达目标识别一直是雷达界研究的热点与重点。
1.1 目标识别过程
目标识别的本质是对目标雷达特性的激励、提取与鉴别。窄带工作模式下,目标回波所能体现的雷达特性相对有限,往往侧重实现分类的功能。如图1所示,窄带雷达目标识别在对目标进行稳定跟踪后可由操作员触发。对于合作性目标,雷达直接接收应答机返回的目标属性;对于非合作性目标,雷达将发射识别波形或直接接收目标回波,经预处理操作后获得目标的特征信号,在此基础上进行特征提取及分类决策,并最终反馈给操作员。
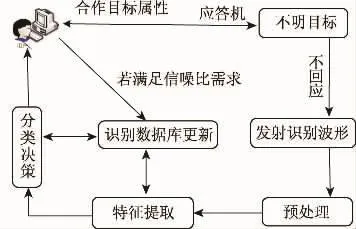
图1 窄带雷达目标识别过程
1.2 典型窄带飞机目标特征
在窄带飞机目标分类识别中,目前应用最为广泛的特征为微多普勒调制特征。在载频为f0,波长为λ,桨叶旋转中心相对于雷达的方位角为α,仰角为β时,包含N个桨叶的旋转部件在光学区产生的合成调制回波为
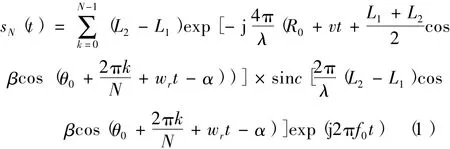
式中,L1为桨叶根部离旋转中心的距离;L2为桨叶尖部离旋转中心的距离;θ0为基准桨叶的旋转初相角;桨叶旋转角速度为ωr;R0为旋转中心(o点)到雷达的初始距离,对上述时域回波进行傅立叶变换,得到回波的频域表示为

因此,调制谱是由一系列线谱组成的。其中谱线幅度cn由参数λ,N,β,θ0,L1,L2和Bessel函数决定。
由上述分析可得,对于特定识别场景(雷达工作参数已知、识别对象已知),目标的调制回波直接决定于目标的方位角及仰角。从雷达视线的角度来看,目标相对雷达进行向站或背站飞行时,雷达测量获得的调制频谱应有明显的区别。典型飞机目标实测数据的频谱图如图2所示。由图可知:同一目标在不同的雷达视线角下调制谱线分布不同。因此,若准确进行飞机目标的类型区分,需要一定规模的准确标注的样本,而这在实际应用中往往较为困难。
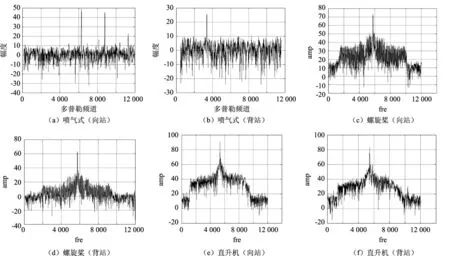
图2 典型飞机目标的调制频谱
2 基于半监督学习的目标识别系统
近年来以支持向量机(SVM,Support Vector Machine)为代表的核学习(KL,Kernel Learning)算法因基于小样本且泛化能力好而在目标识别中有着广泛的应用。在核机器学习中,核矩阵可视为输入信息的一种表达形式。因此,相关核参数的选择直接影响到整个目标识别系统的性能。
2.1 目标特征选择算法
由于产生机理不同,每类特征均有自身的产生条件和有效应用情境。经回波预处理及特征提取后,可获得多种典型的目标特征。在低分辨窄带处理方式下,飞机目标的分类识别应用较多的为调制特征,其种类繁多,产生机理相近。如图3所示,本文针对现有的目标特征根据其有效性进行特征属性的归类及组合;在不同的雷达探测环境(包括工作参数、作用距离、目标自身姿态)下,进行各组合特征的可行性分析,该过程可避免使用不同应用情境的特征组合以加快特征选择的过程;然后,对于可行的特征组合进一步进行有效性分析及资源需求分析,针对实际系统需求折衷选定最终的特征组合。
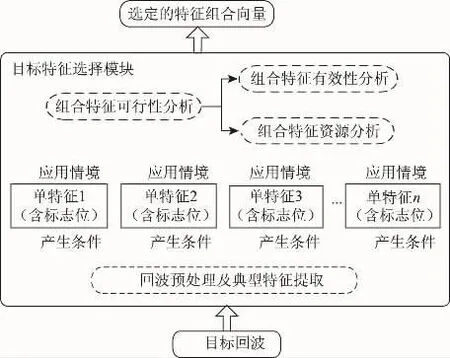
图3 目标特征提取与选择算法
2.2 分类器算法设计
相对于基于单核的核机器学习方法,多核学习可实现输入信息的多角度表达,该特点在一定程度上实现了样本空间的扩大化。本文采用多核学习(MKL,Multi-Kernel Learning)进行目标识别中的半监督学习算法设计。如图4所示,一方面,对于可信度较高、与已知目标密切相关的数据,采用单核(通过将其它核矩阵的权重系数置零实现)的半监督学习方法。在这种模式下,可以获得对特定目标下,核超参数等的偏好特性。同时,可以利用半监督学习算法产生的结果,对未标注的数据逐步完成标注。这类半监督学习通常依赖于较强的模型假设,即需借助于一定的先验知识;另一方面,对于与已有目标信息差异性较大的数据,采用多核的半监督学习算法。该类学习算法的优势在于:在当前数据可利用先验知识较少时,多个核可以并行使用不同的假设模型。每个核的权重在学习训练的过程中自动获得,从而达到自适应调整模型假设的目的。
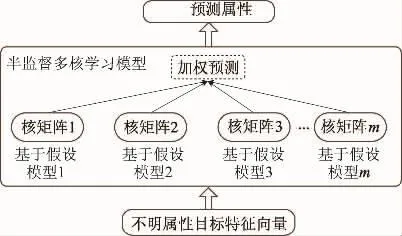
图4 分类器算法设计
2.3 分类器算法实现
半监督学习算法通常基于“聚类假设”与“流形假设”实现对未标注数据的类别预测。前者的代表算法为TSVM,后者为Laplacian SVM。对于非合作性的雷达目标识别任务而言,各应用领域数据分布的先验知识相对较少,因此,本文采用一种多核半监督学习算法TSVM-MKL[16]以综合不同数学模型假设。
令D={(x1,y1),…,(xl,yl),xl+1,…,xl+u}为现有样本集合,为简化描述,本文以二分类问题为例,假设前 l个为准确标注的样本{(xi,yi)∈χ×{-1,1}},后 u个为未标注样本{xi}l+ui=l+1。半监督学习的目的是基于训练集合D完成对未标注样本标签的预测。多核学习算法是有效利用多种信息解决一种学习问题的有效途径。给定希尔伯特空间的一个核函数集合{kk},多核学习旨在学习一个这些核函数的线性组合k(xi,xj)=
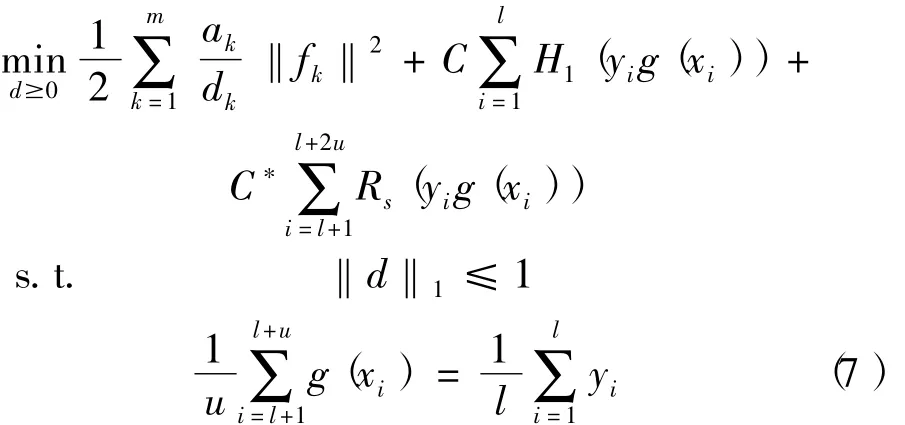
TSVM-MKL通过解决下述优化问题获得
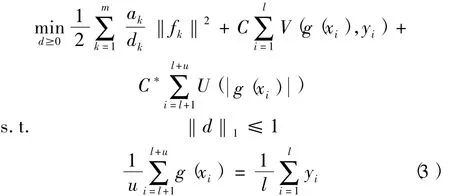
式中,V为Hinge Loss损失函数,U为对称Hinge Loss损失函数,ak为正则化参数,决定两种损失的比重,dk为核权重,决定各核函数的比重,决策函数为

式中,b为偏置项。
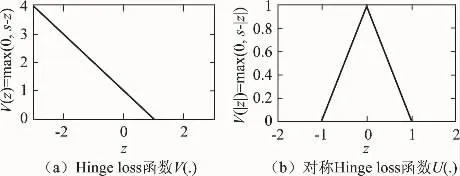
图5 损失函数

式中,Rs(z)为Ramp Loss损失函数,定义为Rs(z)=H1(z)-Hs(z)。当s=0时,即为常规的Hinge Loss函数。为解决该半监督学习问题,将未标注的数据翻倍,并假定其标签如下:

此时半监督学习可转换为监督优化问题,表示如下:
该问题即可利用DC(Difference of Convex func-tions)算法进行求解[17]即可。
3 数据分析
以S波段仿真数据为例,阐述所提识别系统在飞机目标分类识别中的应用。所采用数据包括螺旋桨、喷气式、直升机三类目标在向站/背站飞行时的连续航迹上共计400帧数据(直升机、螺旋桨目标各有150帧,喷气式目标有100帧)。其中,已标注的数据三类目标各有30帧样本,其余为未标注数据。
目标特征提取采用2.1节所用方法,对三大类飞机目标的分类从幅度调制特征、相位调制特征与周期调制特征中最终选定谱线间隔、幅度偏差系数、多普勒域积分三维特征。训练数据与测试数据分布见表1。分类器采用2.3节所述的TSVM-MKL算法,C与C*的值由5-折交叉验证算法从参数空间logspace(-1,3,10)中获得。

表1 飞机目标数据
研究所提基于半监督学习的目标识别系统对测试样本的分类结果见表2。为展示未标注样本对分类结果的帮助,本节基于标注样本训练标准SVM分类器,结果见表3。由结果可知:与常规识别系统相比,引入未标注样本的基于半监督学习的目标识别系统能够有效提高对未知目标的分类准确率。

表2 测试样本分类结果(半监督学习)
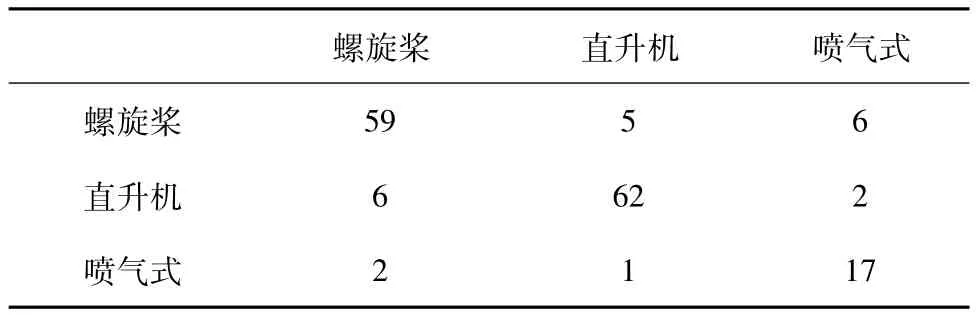
表3 测试样本分类结果(监督学习)
4 结 语
针对非合作目标样本难以进行准确标注,模板库建立复杂、建设过程漫长的问题,本文提出一种基于半监督学习算法的窄带雷达目标识别系统。首先利用目标特征产生机理的不同与应用场景的差异进行提取与选择,然后基于半监督学习算法TSVMMKL以综合利用大量的未标注样本,该分类器算法综合了两种数学假设模型,在未知样本分布的飞机目标分类识别中具有良好的分类性能。数据分析表明,由于降低了对标注样本的规模需求,本文所提的窄带目标识别系统具有良好的工程应用前景。
[1]胡卫东.雷达目标识别技术的再认识[J].现代雷达,2012,34(8):1-5.
[2]马林.雷达目标识别技术综述[J].现代雷达,2011,33(6):1-7.
[3]张群,罗迎,何劲.雷达目标微多普勒研究综述[J].空军工程大学学报,2011,12(2):22-26.
[4]庄钊文,肖顺平,王雪松.雷达极化信息处理及其应用[M].国防工业出版社,1999.
[5]杜兰.雷达高分辨距离像目标识别方法研究[D].西安:西安电子科技大学,2007.
[6]潘勉,王鹏辉,杜兰,等.基于TSB-HMM模型的雷达高分辨率距离像目标识别方法[J].电子与信息学报,2013,35(7):1547-1554.
[7]吴杰.基于高分辨距离像的雷达自动目标识别技术研究[D].南京:南京航空航天大学,2012.
[8]LIQ,XIEW.Target Classification with Low-Resolution Surveillance Radars Based on Multifractal Features[J]. Progress in Electromagnetics Research B,2012,45:291-308.
[9]丁建江.防空雷达目标识别技术[M].国防工业出版社,2008.
[10]方宁,谭飞.基于改进F-SVM算法的雷达距离像目标识别[J].计算机工程与科学,2013,35(6):82-87.
[11]洪先成,张国毅,李冬梅.多特征融合的雷达信号买内调制识别[J].信息与电子工程,2011,9(5):551-555.
[12]BELKIN M,NIYOGIP,SINDHWANIV.Manifold Regularization:A Geometric Framework for Learning from Labeled and Unlabeled Examples[J].JournalofMachine Learning Research,2006,7:2399-2434.
[13]LIM,LIH,ZHOU Z.Semi-Supervised Document Retrieval[J]. Information Processing& Management,2009,45(3):341-355.
[14]TIAN X,GASSOG,CANU S.An Inductive Semi-Supervised Algorithm for BCIs[J].International Journal of Bioelectromagnetism,2011,13(3):117-118.
[15]WANG J,SUN J.Research on Supervised Manifold Learning for SAR Target Classification[C]/CIMSA 2009-International Conference on Computational Intelligence forMeasurement Systems and Applications,Hong Kong,China,2009.
[16]TIAN X,GASSOG,CANU S.A Multiple Kernel Framework for Inductive Semi-Supervised SVM Learning[J]. Neurocomputing,2012,90:46-58.
[17]TAO P D,HOAIAN L T.DC Optimization Algorithms for Solving the Trust Region Subproblem[J].SIAM Journal of Optimization,1998,8(2):476-505.

吴剑旗(1966—),男,四川泸州人,研究员,主要研究方向为雷达系统、先进米波雷达、反隐身等;
E-mail:wujianqi38@163.com
田西兰(1981—),女,山东新泰人,工程师,博士,主要研究方向为雷达目标识别。
A Narrow-Band Radar Target Recognition System Based on Sem i-Supervised Learning
WU Jian-qi,TIAN Xi-lan
(The 38th Research Institute of CETC,Hefei230088,China)
The aim of semi-supervised learning is to predictunknown labels by exploiting altogether available labeled samples and information conveyed by unlabeled data.For classical radar target recognition system that requires large-scale sample base,a narrow-band system based on semi-supervised learning is proposed to reduce the time-consuming labeling procedure,and a multi-kernel learning is employed to implement an automatic feature selection.This system is realized by the TSVM-MKL algorithm.Compared with the classical radar target recognition system based on supervised learning,the proposed system achieves better performance with the contribution of unlabeled data.
narrow-band radar target recognition system;semi-supervised learning;multi-kernel learning;TSVM-MKL
10.3969/j.issn.1673-5692.2015.01.008
TP302.7
:A
:1673-5692(2015)01-049-06
2015-01-04
2015-02-05
猜你喜欢
山东冶金(2022年3期)2022-07-19
电子技术与软件工程(2019年18期)2019-11-18
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
中国惯性技术学报(2018年4期)2018-11-08
电子技术与软件工程(2017年14期)2017-09-08
电子制作(2017年20期)2017-04-26
电子制作(2017年19期)2017-02-02
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07