
2微米激光器环形谐振腔的ABCD矩阵分析
2015-06-05 01:29:34乔亮
福建江夏学院学报 2015年2期
乔 亮
(福建江夏学院数理教研部,福建福州, 350108)
2微米(μm)波长的激光具有良好的大气穿透性,同时又处于人眼安全波段的范围内,在激光相干探测方面有着广阔的应用前景。相干多普勒测风雷达需要单频运转的高脉冲能量激光光源。[1-3]激光的谐振腔作用之一是提供正反馈,使激活介质中产生的辐射能多次通过介质,当受激辐射所提供的增益超过损耗时在腔内得到放大、建立并维持自激振荡。而环形谐振腔能够有效的抑制空间烧孔效应,同时环形腔双向输出的特性,便于种子激光从输出镜端实现注入,降低对种子激光能量的损耗。[4]本文着重分析环形腔,从理论上计算谐振腔的环绕矩阵,得出环形腔的腔型条件以及光束特性等,确定实验中所用的谐振腔腔型参数。
一、环形腔的ABCD矩阵理论

图1 光束经均匀介质和透镜的传播
激光器环形谐振腔的稳定性设计可通过计算ABCD传输矩阵获得,下面将计算谐振腔的环绕矩阵。光线在均匀介质空间自由传播距离L时如图1(a),可用二阶方阵描述。它的光学变换矩阵为:

光经过薄透镜如图1(b),它的变换矩阵为:

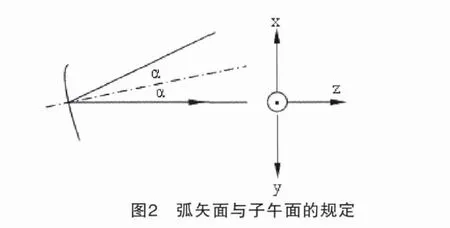
离轴情况下使用的球面反射镜(或者透镜)属于像散元件。在图2所示的坐标下,在yoz(弧矢面S)和xoz(子午面)平面内具有不同的变换矩阵。可以证明,当入射光束轴线与透镜的轴线z成α角时,在弧矢面及子午面上透镜的焦距不再是名义上的焦距,而分别是fS= fsecα及fT=fcosα,其变换矩阵也分别变为相应的焦距,(2)式中i=S,T,分别表示弧矢面和子午面的传输矩阵。[5]
选取8字形环形腔为例。这种结构优点在于反射镜的反射角度可以较小,使得环形腔内子午面和弧矢面的光束分布较一致;可采用两片曲面镜和两片平面镜对称的结构,这样在曲面镜和平面镜之间分别存在一个光腰,正好适合放置工作物质和调Q器件。环形腔双向输出的特点,便于从其中一个输出方向上,注入种子激光,实现对激光频率的控制。稳定的谐振腔损耗较小,并且谐振光束状态不变。下面将计算谐振腔的环绕矩阵,分析其稳定条件。
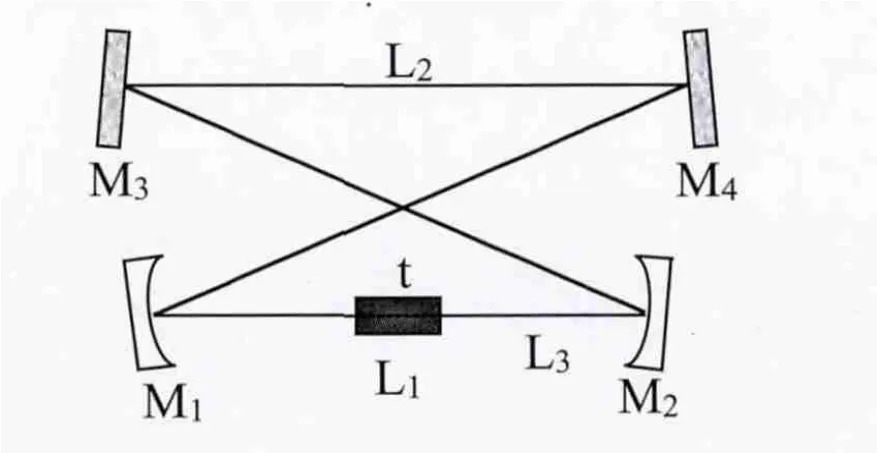
如图3,设两个透镜M1、M2之间的臂长为L1,由M1起,依次经过平面镜M4、M3到M2的臂长为L2,晶体右端面距离M2为L3,晶体长度设为t,折射率为n,晶体左端面距离M1则为L1-L3-t。总腔长为L1+L2。与光轴成较大角度的光线在谐振腔内不作讨论,仅分析旁轴光线在腔内的传播行为。[6]图4为四镜环形腔的等效图。使用分离变量分析法,应用上述的传输矩阵,选取在M1-M2臂上与M1距离为z的平面RP为参考面,参考面RP距离晶体左端面距离就为L1-L3-t-z。可得环绕矩阵(3)式:

求得ABCD的表达式,分别为:


考虑到C对应着系统光焦度的负值,它是不随z变化的常数。A+D反映了谐振腔固有性质,它也不随z变化。令参考面的移动仅在M1和晶体之间的自由空间时,z变为光腰到M1的距离,光腰处等相位面为平面以及光腰为光斑极小值的数学表达式分别为

上述两个方程所获得的解z应该是相等的。因此,将ABCD整理成关于z的一次多项式和二次多项式形式,如下:

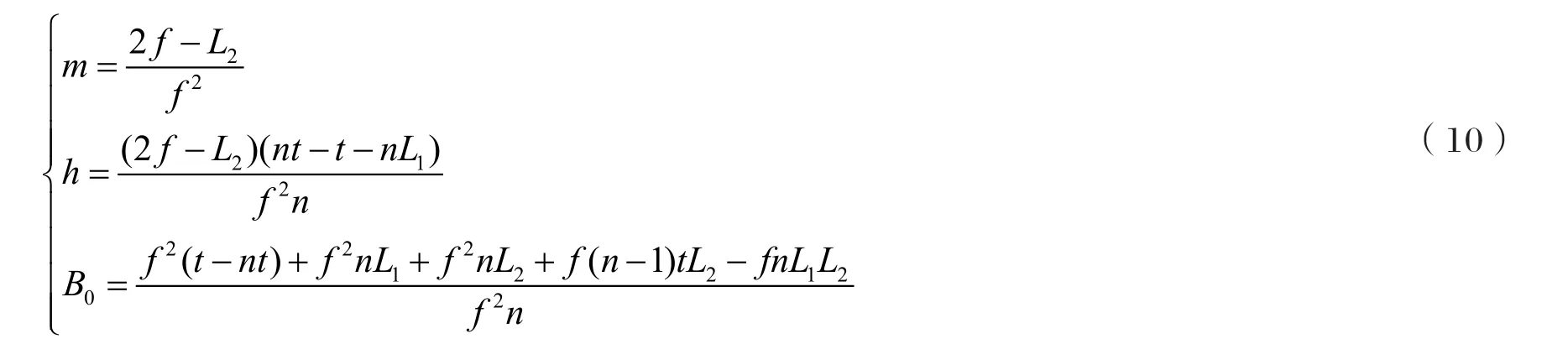
对应(4)~ (7)式,得到(9)式中三个系数如下:
根据式 (8),光腰到镜M1的距离z为

该光腰的共焦参数Z0为

将(10)式中的结果代入(11) 式,可以得出

代入(12)式,得到共焦参数为

而光腰与共焦参数的关系式如下:

谐振腔稳定条件是光腰平方为非负条件,即共焦参数

(14)式中,t为晶体的长度,受泵浦长度为20mm,n为晶体的折射率,n=1.48。有三种不同焦距f的透镜供选择,L2和L1可以变动。
二、环形腔腔型参数分析
(一)稳定性分析
实验条件中,有三种焦距的透镜可供使用,表1列举出对应三种曲率半径的反射镜的子午面和弧矢面内的焦距[7]。在这三种曲率半径条件下,L2取值1500 mm和2200 mm时,L1为变量,分析谐振腔内共焦参数和束腰的分布。

表1 不同曲率半径对应的子午面和弧矢面内的焦距
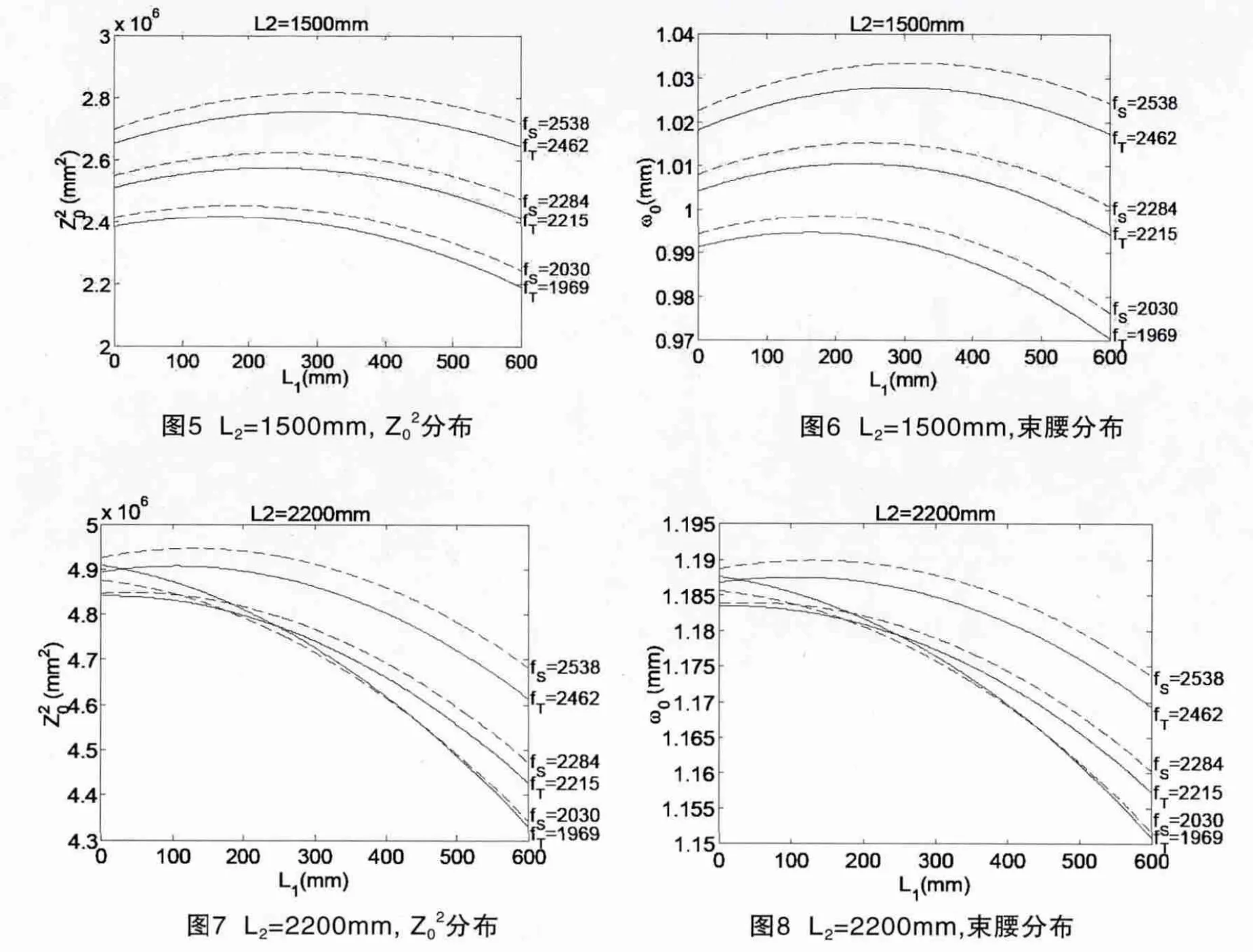
当L2=1500mm,L1在[100600]区间时,计算得到的子午面和弧矢面共焦参数和束腰分布见图5和6。可以看出,当L2=1500mm时,当透镜的曲率半径R=4000mm时,L1取值200mm附近,能够得到腔内较大的束腰半径;R=4500mm,L1取值[200300]之间,能够得到腔内较大的束腰半径,值小于1.01mm;R=5000mm,L1取值[300400]之间,腔内较大的束腰半径值大于1.02mm。
当L2=2200mm,L1在[100600]区间时,计算得到的子午面和弧矢面共焦参数和束腰分布见图7和8。可以看出,当R=4000mm, L1处在[400500]之间时,这时候子午面和弧矢面内的束腰半径能够比较均衡。与L2=1500mm时相比,腔内的束腰半径也明显增大了。
(二)腔型参数的确定
根据以上的分析,下面就腔镜参数进行分析选择:选取L2=1500mm,由图6可知,L1确定的条件下,f越大,腔内束腰越大,由此判断曲率半径为5m的曲面镜有优势。但是,子午面和弧矢面上束腰差距随着曲率半径的增大也更加明显,这会影响到谐振腔型的对称性,运行后输出激光的光束质量也会受到负面影响。如果将L2适当加长,如图8所示,当L2=2200mm,曲面镜曲率半径为4m时,L1取450mm左右时,子午面和弧矢面具有相同的共焦参数,光腰相等(约等于1.166mm)。这将是比较适宜的腔型条件。
三、实验中采用的腔型参数
在实验中,兼顾机械结构等条件,选取L2=2225mm,曲面镜子午面和弧矢面内的焦距分别为1969.62mm和2030.85mm。计算得到曲面镜之间的束腰ω0T=1.20003 mm,ω0S=1.19977 mm,瑞利长度ZRT=2203.66mm,ZRS=2202.71mm,在腰斑距离M1为221.757mm时,计算得到的M1镜处光斑等参数可参见表2,发散角2θT=1.19797mrad,2θS=1.19782 mrad,基本一致。

表2 L1=2225mm腔内器件光束分布
四、小结
根据相干探测对光源的要求,提出了环形腔的谐振腔结构,有助于抑制空间烧孔效应,便于实现种子注入;四镜8字环形谐振腔,可以使得反射镜的角度较小,并且实现两个曲面镜和两个平面镜之间各存在一个束腰的结构,便于插入激光增益介质和调Q等器件。利用ABCD传输矩阵,分析了当L2=1500mm和2200mm时两种腔长结构下的腔型情况。确定了L1=450mm,L2=2225mm,曲面镜曲率半径为4m的腔型参数,并计算得到了腔内光束特性,为实验系统的搭建提供了理论依据。
[1]Koch G J,Beyon J Y,Barnes B W,et al.High-energy2μm Doppler lidar for wind measurements[J].Opt.Eng,2007,46(11):116201.
[2]Jirong.Yu,Bo C.Trieu,Ed A.Modlin et al..1J/pulse Q-switched2μm solid-state laser[J].Opt.Lett.,2006,31(4):462-464.
[3]Shu Shijiang,Yu Ting, Liu Rongtao,et al.Diode- -side-pumped AO Q-switched Tm,Ho:LuLF laser[J].Chin.Opt.Lett.,2011,9(9):091407-1-3.
[4]陈钰清,王静环.激光原理[M].杭州:浙江大学出版社,1992:55-60.
[5]吕百达.激光光学:激光束的传输变换和光束质量控制[M].成都:四川大学出版社,1992:26-30.
[6]万顺平,孙立群,田芊, 章恩耀.一种LD泵浦双向输出固体环形激光器[J].光学技术,2005,31(1):44-47.
[7]Qiao Liang,Yang Fu-Gui,Wu Yong-hua,Ke You-Gang, Xia Zhong-Chao.Theoretical and experimental researches on Tm and Ho codoped Q-switching laser [J].Acta Phys.Sin.2014,63(21):214205-1-7.
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:00
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:46
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:16
中学生数理化·八年级物理人教版(2021年11期)2021-12-06 06:44:38
摄影与摄像(2021年12期)2021-10-01 14:23:33
艺术品鉴(2021年21期)2021-08-15 05:54:58
锦绣·上旬刊(2020年3期)2020-06-08 09:43:52
电子测试(2018年11期)2018-06-26 05:56:12
长春理工大学学报(自然科学版)(2015年6期)2015-10-12 05:22:38
物理实验(2015年9期)2015-02-28 17:36:45
