
基于子空间技术的电动汽车电池模型辨识研究
2015-06-05 08:46李勇王丽芳廖承林王立业徐冬平
电工电能新技术 2015年1期
李勇,王丽芳,廖承林,王立业,徐冬平
(1.中国科学院电力电子与电力传动重点实验室,电工研究所,北京100190; 2.中国科学院大学,北京100049)
基于子空间技术的电动汽车电池模型辨识研究
李勇1,2,王丽芳1,廖承林1,王立业1,徐冬平1
(1.中国科学院电力电子与电力传动重点实验室,电工研究所,北京100190; 2.中国科学院大学,北京100049)
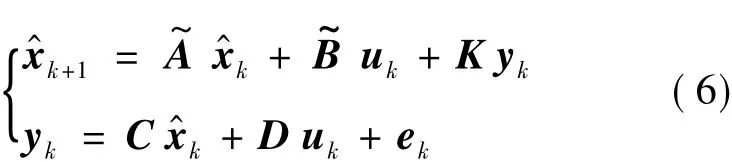
电动汽车动力电池模型的观测和辨识是电动汽车高效、稳定、安全运行的基础。基于电池的电路模型,从利于辨识的角度,建立了状态空间形式的电池模型,并提出了基于子空间技术的模型辨识算法。在不同阶次、脉宽和幅值下,采用逆M序列对电池模型辨识效果进行了验证和比较,最终提出了最优的电动汽车动力电池参数辨识方法。实验结果表明,该方法具有较高的精度和普遍的适用性,可以广泛地应用于不同类型的电池。
电池模型;子空间;模型辨识;电池测试方法
1 引言
动力电池是电动汽车能量的直接来源,也是电动汽车的核心组成部分。随着动力电池技术的不断发展,锂离子电池由于其高能量密度、长循环寿命、较高电压平台以及不存在记忆效应等优点,被公认为是最具有发展前景的动力电池,并且已被广泛应用于电动汽车领域。在动力电池的使用过程中,需要对电池的荷电状态(State-of-Charge,SOC)进行实时监测,以优化电池的使用。与此同时,由于工作环境等因素的影响,电池可能会工作在不安全状态,在这种情况下,对电池的健康状态(State-of-Health,SOH)进行实时监测就显得十分必要。然而,电池的SOC和SOH并不能直接测量得到,因此建立一个能够表征电池的输入输出(激励电流和响应电压)与内部状态关系的电池模型就显得尤为重要。这对于电池的合理使用和电动汽车安全性的提高均具有重要意义。
目前,不同学科领域的学者从不同角度对锂离子电池模型均进行了研究,主要可以分为机理模型、经验模型和电路模型。机理模型[1,2]通过电池电化学反应第一性原理,描述电池的基本特性,该模型通常包含大量的模型参量,并且运算十分复杂,不适用于整车环境下的实时预测。经验模型[3,4]不关心电池的电化学反应机理,直接根据电池实验数据,通过人工数理统计或机器智能算法,实现对电池特性的建模。经验模型的本质是对实验数据的处理,需要大量的实验数据作为支撑,不具有普遍适用性。电路模型[5,6]从电工学角度出发,将电池等效成一个集总参数电路模型,该模型是电化学模型的最简明等效形式,并且能够兼顾精度和运算复杂度,是目前应用最为广泛的电池模型。本文从电池模型数值化分析的角度,重点对电池模型的结构和参数辨识方法展开研究。
2 锂离子电池模型
锂离子电池的模型结构是电池系统辨识的基础。典型的几种锂离子电池等效电路模型主要包括Rint模型、Randels模型以及Thevenin模型。其中,Thevenin模型以其直观的物理意义和较高的精度得到了广泛应用。包含两个RC惯性环节的Thevenin模型如图1所示,其中OCV(Open Circuit Voltage)为电池的开路电压,它用来表示电池处于电化学平衡状态时的自身内电势;R0为电池的内电阻;两个串联的RC环节表示电池的极化效应,RC环节越多模型的精度越高,同时运算也更为复杂。考虑到电池显著的非线性特性,模型中的所有参数均是随着SOC的变化而变化的,但是这种变化规律可以认为是不变的。因而,在不同SOC处对电池进行模型参数辨识,然后将辨识的结果进行拟合或统计学处理,进而得到模型参数与SOC的函数关系,这样便可以得到一个完整的电池模型。
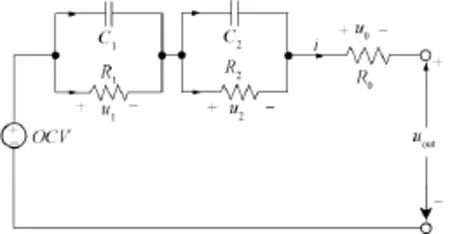
图1 Thevenin模型电路结构Fig.1 Schematic of Theveninmodel
根据电路理论,图1所示模型的电气特性可以描述为如下状态空间形式:
式中,u1和u2分别为C1和C2两端的电压,它们作为模型的状态变量;i为电池的输入/输出电流,是模型的输入变量;uout为电池的端电压,是模型的输出变量。考虑到在实际应用中,电池模型是以离散的形式体现的,因此根据零输入和零状态理论[5],式(1)可以转换为如下离散形式:
式中,Δt为系统采样周期;τ1和τ2为两个RC环节引起的等效延时,它们分别定义为:

在物理意义上,它们分别对应电化学极化和浓差极化引起的迟滞现象。
3 基于预测的子空间辨识算法
基于子空间的模型辨识方法(Subspace-based Model Identification)是20世纪末提出的一类新的状态空间模型辨识方法。子空间辨识方法以其较高的数值稳定性、无需迭代、不依赖初值等优点,得到了越来越多的关注。子空间辨识和经典辨识在思想上的主要区别可以用图2说明。
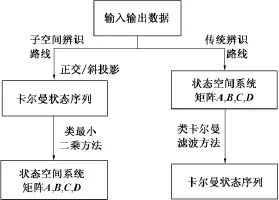
图2 子空间辨识和传统辨识的区别Fig.2 Difference between subspace-based identification and traditional identification method
如图2所示,经典辨识算法是利用状态空间模型来估计其卡尔曼状态向量:先利用输入输出数据预估系统矩阵,而后估计系统的卡尔曼状态序列。而子空间辨识则恰好相反:先采用正交和斜投影方法,将输入/输出数据所构成的数据空间分解成信号和噪声这两个相互正交的子空间,进而获得系统的卡尔曼状态序列,并在此基础上对系统矩阵进行估计。下面重点介绍基于预测的子空间辨识算法(Predictor-based Subspace Identification,PBSID)[7]的实现过程。
3.1 系统描述
对于式(2)描述的电池状态空间模型,可以写成如下一般形式:

式中,xk∈n为系统状态向量;uk∈r为输入向量;yk∈l为输出向量;wk∈n和vk∈l分别为系统的过程噪声和测量噪声。对于电池系统,uk∈r表示电池的输入/输出电流,yk∈l为端电压。A∈n×n,B∈n×r,C∈l×n,D∈l×r为系统矩阵。其中,n表示n维的实数域,l,r,n表示向量的纬度。根据卡尔曼滤波理论[8],可以得到:

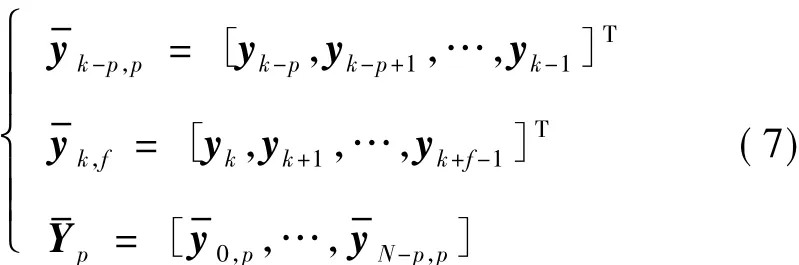
为了便于批量辨识,定义算法的过去窗口(past window)p∈瓔+和未来窗口(future window)f∈瓔+,并且f应满足f≥n/l。进而系统的批量输出向量可以定义为:

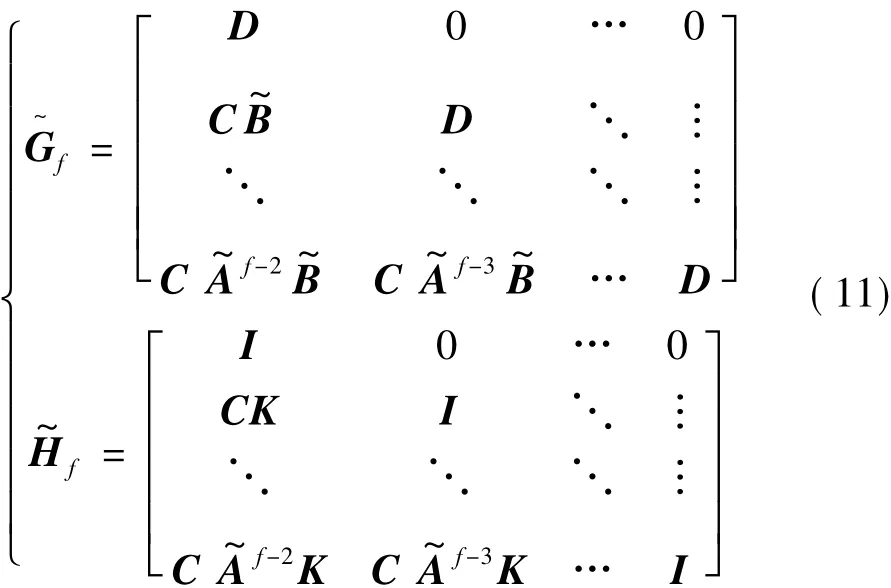
槇Γf是扩展观测矩阵:


进而根据式(8)可以得到:
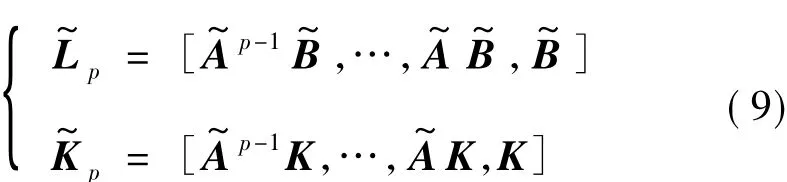
式中,Γ槇L和Γ槇K为扩展观测矩阵和控制矩阵之积:
3.2 算法实现
根据以上系统分析,基于预测的子空间辨识算法的实现步骤可以归纳如下:
(1)算法初始化:首先对系统输入uk和输出yk进行采样;紧接着,初始化算法的权重矩阵W∈瓗f×l、模型阶次、过去窗口p以及未来窗口f,并且需要满足p≥f;最后构建系统p、p、U、Y矩阵。
(2)预测系统马尔科夫参数:首先,将系统看成超前一步输入自回归(Vector Auto-Regressive with eXogenous inputs,VARX)模型,即:


进而,利用采集得到的输入输出数据,对式(16)进行最小二乘估计,得到系统的马尔科夫参数。
(3)系统状态估计:首先,根据式(14)、式(15)建立系统和矩阵。并计算:

其次,采用奇异值分解(Single Value Decomposition,SVD)方法解决上述低秩估计的问题:

最后,系统状态序列可以由下式计算得到:

式中,∑n表示对式(19)进行奇异值分解后得到的半正定n×n实数对角矩阵。
(4)系统矩阵估计:通过最小二乘方法计算C矩阵和D矩阵:

式中,表示伪逆算子。
4 实验及测试方法优化
4.1 电池测试方法
在建立电池模型时,如果模型的结构和参数辨识方法已经确定,那么模型的精度将直接依赖于输入信号和所设定的模型阶次。为了保证模型的精度和普遍适用性,期望输入信号能够激励出电池系统的大部分特征或模态,这样的信号称为持续激励信号。然而在电动汽车实时工况下,电池的实际运行数据通常并不完全包含电池的本质特征,直接用于辨识往往达不到预期效果。白噪声是一种较为理想的激励信号,它可以保证良好的辨识效果。但是由于白噪声在工程上不易实现,因此采用具有近似白噪声性质的逆M序列作为激励信号,本文提出的基于逆M序列的电池测试方法如图3所示。
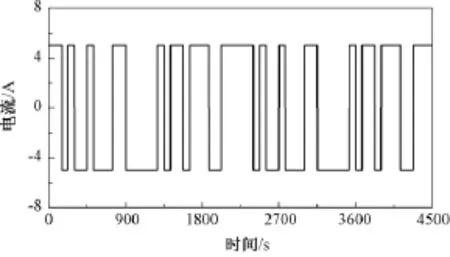
图3 逆M序列测试方法的电流曲线Fig.3 Current profile of inverse M-sequence testmethod
对图3所示曲线进行分析可知,逆M序列不含直流成分,在整个实验周期内对电池的SOC不造成偏移。此外,该测试方法同时包含不同持续时间的充电和放电脉冲,且脉冲宽度服从正态分布规律,这符合电池的实际使用规律。本文的实验对象是力神公司生产的10A·h磷酸铁锂电池,测试设备为Arbin BT2000电池测试系统,系统采样周期为2.5s。
4.2 模型阶次选择
在上述辨识理论和实验方法的基础上,首先对电池模型的阶次展开研究。系统阶次的选择一般通过先验知识获得,在对电池系统了解不多的情况下,通过实验比较的方法来确定合理的模型阶次。因此,本文基于同一组实验数据,分别采用2阶、3阶、4阶和5阶的模型结构,对电池模型进行辨识,得到的辨识结果如图4所示。
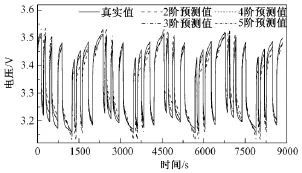
图4 不同阶次模型结构辨识结果Fig.4 Identification results based on batterymodel structure with different orders
由图4可知,当模型的阶次设定为2阶时,算法预测输出的电压响应与真实值有较大的偏差;当模型阶次大于等于3阶时,模型的预测输出值与真实值之间的误差明显减小;并且随着模型阶次的进一步增大,算法的预测性能并没有得到明显的提升。为了更加细致地对算法预测的精度进行评价,采用预测方差比(Variance-Accounted-For,VAF)作为判断算法预测结果优劣的标准。VAF的定义如下:

表1 不同阶次模型预测精度Tab.1 Estimated accuracy ofmodels with different orders
4.3 测试方法优化
电池测试方法的优化也是十分重要的,这可以进一步提高电池模型的辨识精度。对于电池系统而言,测试方法主要集中在两个方面:测试电流的频率分布范围应覆盖电池的主要工作频率;测试电流的幅值应能够完全激励出电池的主要模态特性。
首先,对测试方法的频域特性进行优化。如图3所示,测试方法的频宽在时域上的体现就是每一个脉冲的宽度,且频宽上限对应最小脉宽,因此决定测试方法频域特性好坏的重要因素是测试方法的最小脉冲宽度。分别用最小脉宽为10s、50s、75s和100s(分别对应频宽0.1Hz、0.02Hz、0.013Hz和0.001Hz)的逆M序列对电池进行参数辨识实验,采用PBSID算法得到的预测精度如表2所示。可以很清楚地发现0.013Hz的频谱宽度已经能够涵盖电池大部分的频率特性,其对应的75s脉冲宽度是最优的最小脉冲宽度。
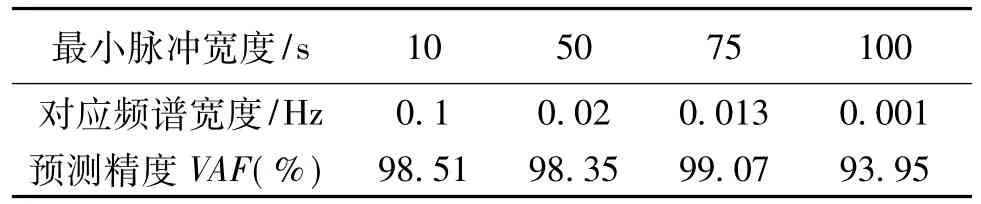
表2 采用不同脉宽测试方法得到的模型预测精度Tab.2 Estimated accuracy ofmodels using inverse M-sequence testmethod with different pulse widths
相似地,以不同电流幅值的逆M序列对电池进行参数辨识实验,选用的测试脉冲的幅值分别为±2A、±5A、±8A和±10A。为了让实验结论更加准确和具有说服力,将辨识得到的模型用不同幅值的实验数据进行验证,得到的实验结果(预测精度)如表3所示。可以很清楚地发现,当逆M序列的幅值确定为±5A时,可以获得最佳的辨识效果。
5 模型验证
通过以上方法辨识得到的电池模型必须经过模型验证环节以检验其有效性和可靠性。采用最小脉冲宽度为75s、电流幅值为±5A的逆M序列对电池进行参数辨识实验,并利用PBSID算法获得了最优的3阶电池模型。针对电动汽车动力电池的实际使用工况,设计了两组验证实验对辨识得到的电池模型进行验证。首先,针对电动汽车在市区工况下的频繁加速和回馈制动的工作特性,设计了高频混合脉冲测试实验对电池模型的频繁充放电性能进行验证。高频混合脉冲测试的最小充电时间为10s,电流幅值为±8A,具体的测试电流和相应的电压响应如图5所示。
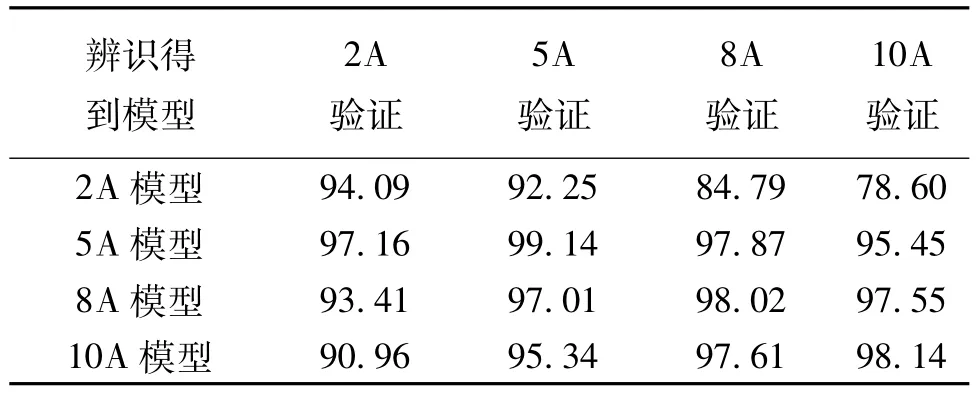
表3 采用不同电流幅值测试方法得到的模型预测精度Tab.3 Estimated accuracy ofmodels using inverse M-sequence testmethod with different current amplitudes单位:(%)

图5 高频混合脉冲实验验证数据Fig.5 Model validation results in high-frequency hybrid pulse test voltage
由图5可以清楚地发现,在频繁充放电切换工况下,通过上述方法辨识得到的电池模型能够快速地跟踪电池端电压的变化。此外,算法计算得到的VAF值高达98.61%,能够较好地满足电池系统使用的精度需求。
其次,针对电动汽车动力电池的长时间恒流充放电的使用需求,设计了长周期脉冲测试实验来验证模型的长时间充放电性能。设计的充放电测试脉冲幅值为±5A,持续时间为300s,具体的测试电流和相应的电压响应如图6所示。
由图6可知,辨识得到的电池模型能够较好地跟踪实际测量电压的变化,在实验初期(0~300s)存在较大误差的原因是电池的极化效应还没达到稳定状态。此外,计算得到的VAF值为93.45%。综上,采用本文提出的模型辨识方法得到的电池模型能够很好地满足各种典型工况的使用需求,并且具有较高的预测精度。
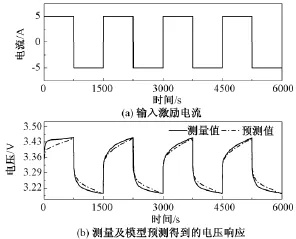
图6 长周期脉冲实验验证数据Fig.6 Model validation results in long-period pulse test
6 结论
本文围绕电动汽车动力电池模型辨识这一核心问题,采用基于子空间技术的模型参数辨识技术路线,分别对电池状态空间模型结构、基于预测的子空间参数辨识算法、电池测试方法优化等子问题展开了研究。研究表明,当模型的阶次选择为3阶,并选择最小脉冲宽度为75s、电流幅值为±5A的逆M序列作为激励电流时,可获得最佳的辨识效果。模型验证实验表明,辨识得到的电池模型在高频混合脉冲工况和长周期恒流充放电工况下的精度分别为98.61%和93.45%,可以很好地满足电动汽车动力电池系统的使用需求。此外,本文提出的电池模型辨识方法具有较高的精度和普遍适用性,可以广泛地应用于不同类型的电池。
[1]Zhang Y,Wang C Y.Cycle-life characterization of automotive lithium-ion batterieswith linio2 cathode[J].Journal of the Electrochemical Society,2009,156(7): A527-A535.
[2]Pattipati B,Sankavaram C,Pattipati K R.System identification and estimation framework for pivotal automotive battery management system characteristics[J].IEEE Transactions on Systems,Man,and Cybernetics,Part C: Applications and Reviews,2011,41(6):869-884.
[3]黎火林,苏金然(Li Huolin,Su Jinran).锂离子电池循环寿命预计模型的研究(Cycle-life prediction model studies of lithium-ion batteries)[J].电源技术(Chinese Journal of Power Sources),2008,32(4):242-246.
[4]Li Z,Lu L,Ouyang M,et al.Modeling the capacity degradation of LiFePO4/graphite batteries based on stress coupling analysis[J].Journal of Power Sources,2011,196(22):9757-9766.
[5]Dai H,Wei X,Sun Z,etal.Online cell SOC estimation of Li-ion battery packs using a dual time-scale Kalman filtering for EV applications[J].Applied Energy,2012,95:227-237.
[6]Gould C R,Bingham C M,Stone D A,et al.New batterymodel and state-of-health determination through subspace parameter estimation and state-observer techniques[J].IEEE Transactions on Vehicular Technology,2009,58(8):3905-3916.
[7]Ivo Houtzager,J-W van Wingerden,Verhaegen M.Recursive predictor-based subspace identification with application to the real-time closed-loop tracking of flutter[J].IEEE Transactions on Control Systems Technology,2012,20(4):934-949.
[8]Chui C K,Chen G.Kalman filtering:with real-time applications[M].Berlin:Springer,2009.
Research on subspace-based identification of battery model for electric vehicles
LIYong1,2,WANG Li-fang1,LIAO Cheng-lin1,WANG Li-ye1,XU Dong-ping1
(1.Key Laboratory of Power Electronics and Electric Drives,Institute of Electrical Engineering,Chinese Academy of Sciences,Beijing 100190,China; 2.University of Chinese Academy of Sciences,Beijing 100049,China)
For reliable and safe operation of lithium-ion batteries in electric vehicles,themodeling and parameter estimation are urgently needed.The purpose of thiswork is to propose a novel subspace-based parameter identifica-
(,cont.on p.40)
(,cont.from p.6)tion method for electric vehicle batteries.First,a state-space batterymodel is built based on the equivalent circuit model.Then,the predictor-based subspace identification algorithm aswell as the inverse M-sequence testmethod are introduced to estimate the batterymodel parameters.In addition,some improvements includingmodel order selection,pulsewidth and amplitude optimization aremade to improve the estimation accuracy.Finally,the performance of the model is validated through some validation test.Validation results show that the proposed subspacebased identification method can achieve high accuracy with the least VAF being larger than 93.45%.
batterymodel;subspace;model identification;battery testmethod
TM912.9
A
1003-3076(2015)01-0001-06
2013-10-10
国家863项目(2012AA110202),国家自然科学基金项目(51307160),国家支撑技术资助项目(2015BAG17B06)
李勇(1988-),男,江苏籍,博士研究生,研究方向为电动汽车动力电池管理技术;王丽芳(1971-),女,山西籍,研究员,博士,研究方向为电池管理技术和车载总线技术。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
计量学报(2020年7期)2020-08-07
液压与气动(2020年4期)2020-04-10
汽车实用技术(2019年24期)2019-12-27
电子制作(2019年16期)2019-09-27
电子制作(2019年15期)2019-08-27
组合机床与自动化加工技术(2019年7期)2019-08-06
价值工程(2017年28期)2018-01-23
电子制作(2017年7期)2017-06-05
振动与冲击(2016年15期)2016-09-13
