新型半潜式海洋通信平台结构设计及倾斜试验研究及倾斜试验研究
2015-06-05 15:24李宏源王大政任冬亮
舰船科学技术 2015年10期
梅 蕾,李宏源,,王大政,王 鑫,徐 丽,刘 畅,任冬亮
(1.哈尔滨工业大学(威海)船舶与海洋工程学院,山东 威海 264209;2.国家海洋技术中心,天津 300112;3.江苏科技大学,江苏 镇江 212003)
新型半潜式海洋通信平台结构设计及倾斜试验研究及倾斜试验研究
梅 蕾1,李宏源1,2,王大政1,王 鑫2,徐 丽1,刘 畅3,任冬亮1
(1.哈尔滨工业大学(威海)船舶与海洋工程学院,山东 威海 264209;2.国家海洋技术中心,天津 300112;3.江苏科技大学,江苏 镇江 212003)
基于CCS《海上移动平台入级规范》设计新型半潜式海洋通信平台并确定该平台的主尺度及加筋结构,然后运用SolidWorks软件建立海洋平台的三维结构模型,并计算出模型的重心、浮心坐标。按照缩尺比=1∶30的比例设计并建造该半潜式海洋通信平台的模型,其中模型采用玻璃钢材料,且保证实体与模型的重心、浮心坐标及惯性矩等满足相应的比例关系,最后进行模型倾斜试验。将软件模拟的结果与倾斜试验的结果进行对比,重心坐标误差为0.5%,验证了设计的可行性。
半潜式平台;结构设计;倾斜试验
0 引 言
新型半潜式海洋通信平台不同于钻井平台和浮标,结构设计上有很多创新,如系泊方案采用深海单点系泊方法。该海洋平台集太阳能发电、液压式风力发电等新能源于一体,为海洋平台通信任务系统提供能量。该新型半潜式海洋通信平台布设在中国南海水深约2 000 m海域,是一款用于获取海上气象水文观测资料的综合性大型海洋观测平台。该平台能够定时提供气温、气压、空气湿度、风速、风向、海水温盐度、浪高、流速、流向等海上气象水文资料,以加强对我国南海海域恶劣海况和气候变化的监测预警能力。对于新型半潜式海洋通信平台,按照CCS《海上移动平台入级规范》设计寿命为30年。
半潜式海洋通信平台能够与卫星、飞机、海洋调查船、海监船和深潜器等构成立体的海洋监测网络系统。该半潜式海洋通信平台使用太阳能电池板及液压风力发电系统为通信系统提供能源,能耗低,且对海洋环境几乎不造成污染。与其他海洋环境监测系统相比,半潜式海洋通信平台具有抗风浪能力强、寿命长、外形结构简化、功能齐全、成本低、更大的工作水深、低能耗、无污染等优点[1]。
传统船舶与海洋结构物倾斜试验的倾角测量多采用摆锤法。本文采用一种AH-100B航资传感器测量海洋平台的倾角,并用LabVIEW程序进行数据采集,对船舶与海洋结构物倾斜试验的创新及改进有广泛的借鉴意义。
1 新型半潜式海洋通信平台结构设计
半潜式海洋通信平台的主尺寸包括平台长度、宽度和型深。平台长度指平台在中纵剖面上的最大水平投影尺寸;平台宽度指垂直于纵剖面量得的两舷壳板内侧之间的最大水平距离;平台型深指平台长度中点处沿舷侧从基线量至下壳体最上层连续甲板梁上缘的垂直距离。新型半潜式海洋通信平台主尺度及主体结构主要参数如表1所示(选取中纵剖面、中横剖面和水线面交点为坐标原点;Z轴为上下方向,向上为正)。
按照CCS《海上移动平台入级规范》[2],对半潜式海洋通信平台进行结构设计,其主尺度如表1所示,加强筋方案如表2所示。平台整体结构、设备箱结构、立柱和太阳能板结构分别如图1~图4所示。
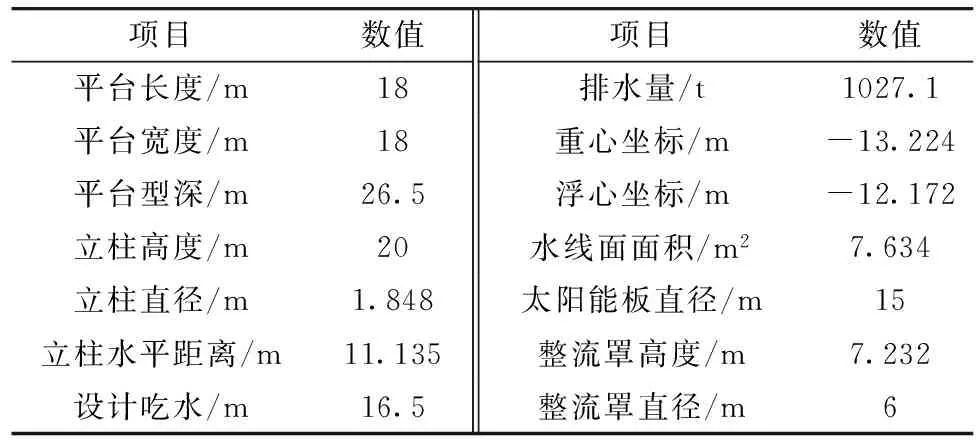
表1 半潜式海洋通信平台技术参数Tab.1 Principal dimensions of semi-submersible communicationsplatform

表2 新型半潜式海洋平台加强筋设计方案Tab.2 Stiffener design scheme of semi-submersiblecommunications platform
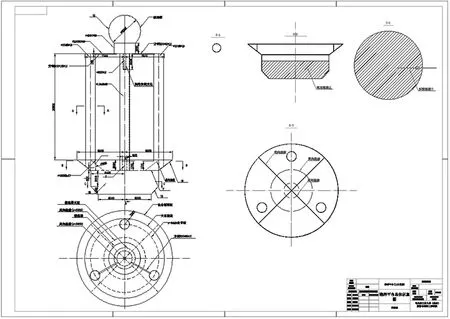
图1 新型半潜式海洋平台整体结构图Fig.1 General design structure of semi-submersible communications platform
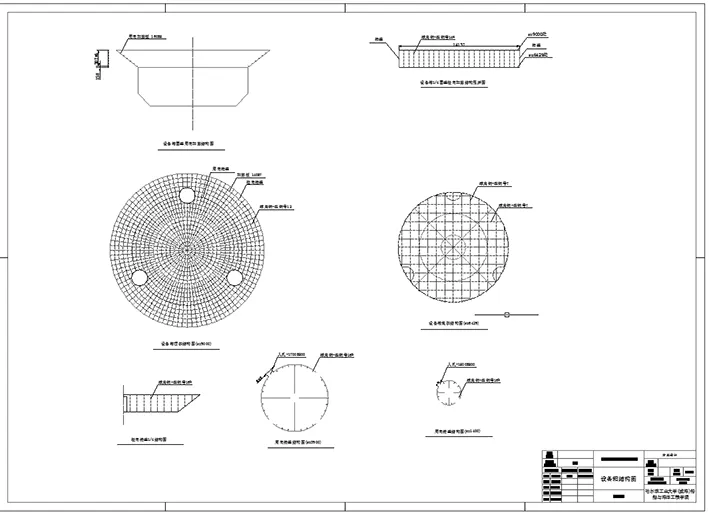
图2 新型半潜式海洋平台设备箱结构图Fig.2 Equipment compartment structure of semi-submersible communications platform
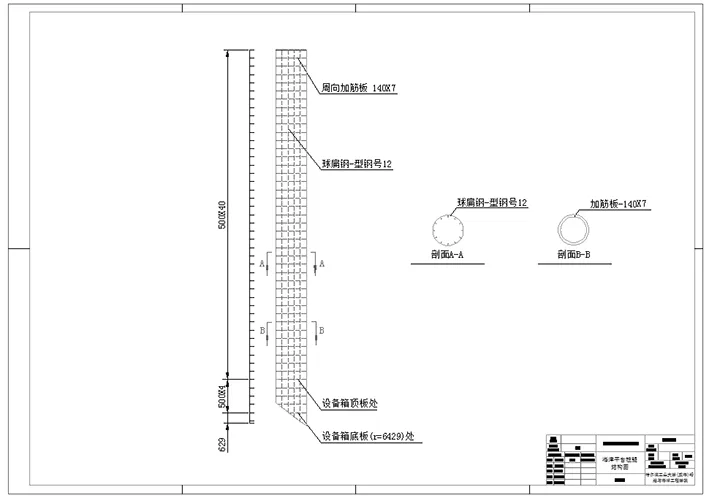
图3 新型半潜式海洋平台立柱结构图Fig.3 Column structure of semi-submersible communications platform
海洋平台在水池中进行模型水动力性能试验的第一道工序是模型制作。平台模型不仅在外形上要和实体几何相似,而且和性能有关的参数如重量、重心位置以及惯性矩等也要满足几何相似要求。
在海洋平台的初步设计中,重心、浮心坐标及惯性矩的计算十分重要,所以本文基于SolidWorks软件对该新型半潜式海洋通信平台进行三维结构设计,计算出海洋平台整体结构的重心、浮心及惯性矩,为水动力计算及结构优化做准备。其中,半潜式海洋通信平台整体结构如图4所示,舱室及太阳能板结构分别如图5和图6所示。
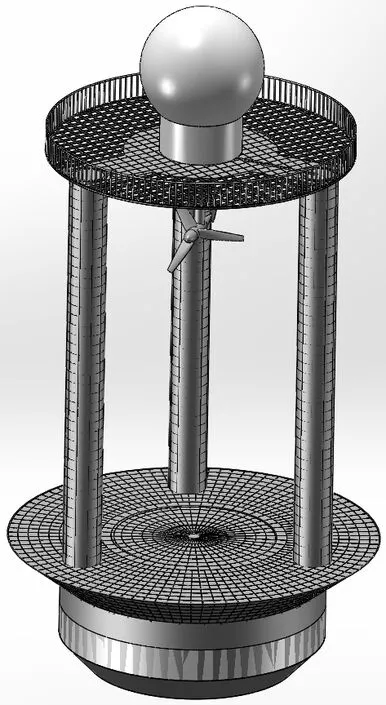
图4 半潜式海洋通信平台整体示意图Fig.4 The overall schematic of semi-submersible communications platform
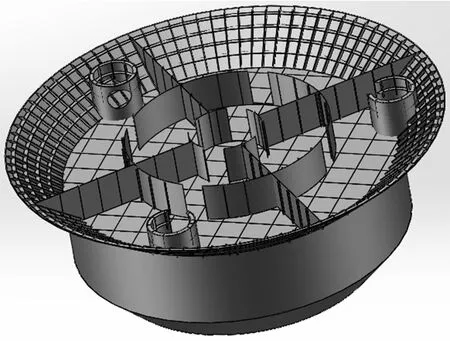
图5 新型半潜式海洋通信平台舱室示意图Fig.5 The cabin schematic of semi-submersible communications platform
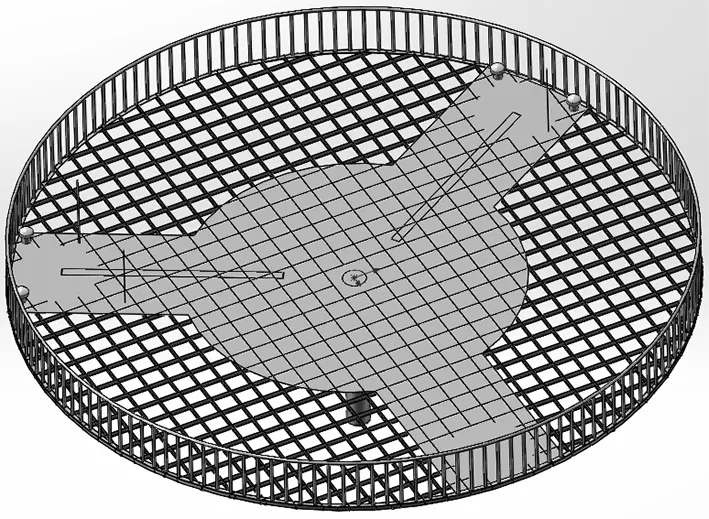
图6 新型半潜式海洋通信平台太阳能板结构图Fig.6 The solar panel structure of semi-submersible communications platform
2 海洋平台模型倾斜试验
外形及上层建筑几何相似的海洋平台模型制成后,需要根据海洋平台实体的数据,对模型的重心位置及惯性矩等技术参数进行校核,以保证模型与实体的质量和质量分布相似,这些参数直接影响到海洋平台在海上风、浪、流作用下的运动及受力。倾斜试验的目的在于确定空海洋平台的实际排水量及其重心的实际位置[3]。
2.1 试验原理
当海洋平台正浮于水线WL时,其排水量为Δ,若将海洋平台上A点处的重物P横向移动某一段距离L至A1点,则海洋平台横倾并浮于新水线W1L1。
从海洋平台上载荷移动公式可知,此时海洋平台的横倾角φ的正切[4]:
(1)
将式(1)带入式(2),即可得到海洋平台重心垂向坐标ZG的计算公式:
(2)

2.2 试验模型及设施
按照1∶30的比例,运用玻璃钢材料制造该半潜式海洋通信平台的模型,倾斜试验模型如图7所示。该试验在哈尔滨工业大学(威海)船舶与海洋工程学院循环水槽进行。

图7 模型示意图Fig.7 The schematic of model
2.3 试验步骤
重物布置情况如图8和图9所示,倾斜试验重物布置情况如表3所示。倾斜试验重物移动情况如表4所示。试验数据采集和记录采用Labview程序,倾角测量示意图如图10所示,倾斜试验结果如表5所示。试验数据计算如表6所示。
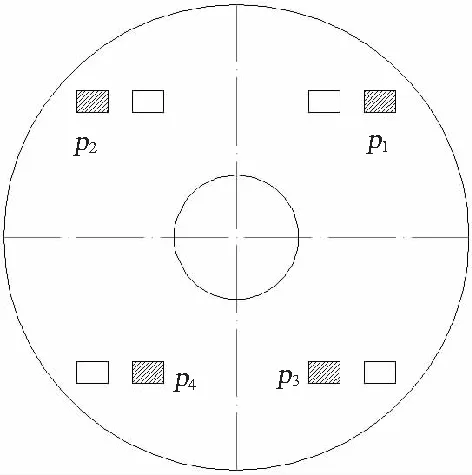
图8 倾斜试验移动重物位置分布Fig.8 Location map of moving weight in inclining experiment
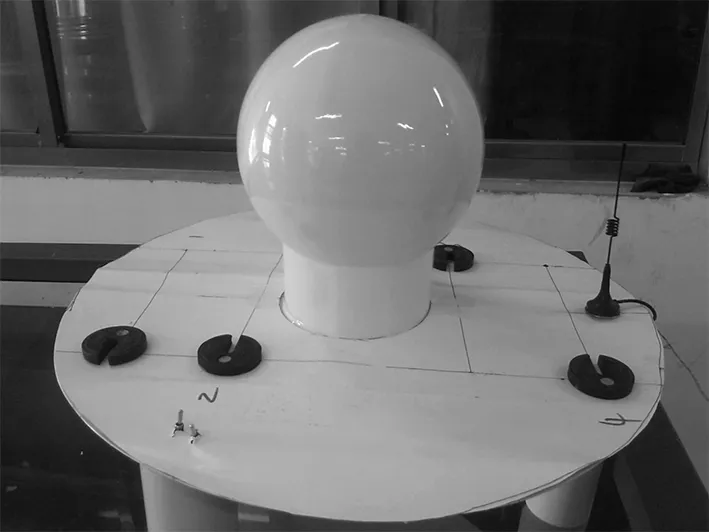
图9 倾斜试验移动重物实际位置示意图Fig.9 The actual location of moving weight in inclining experiment
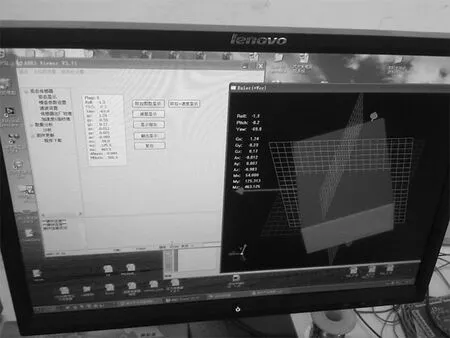
图10 倾角测量示意图Fig.10 Angle measurement schematic diagram
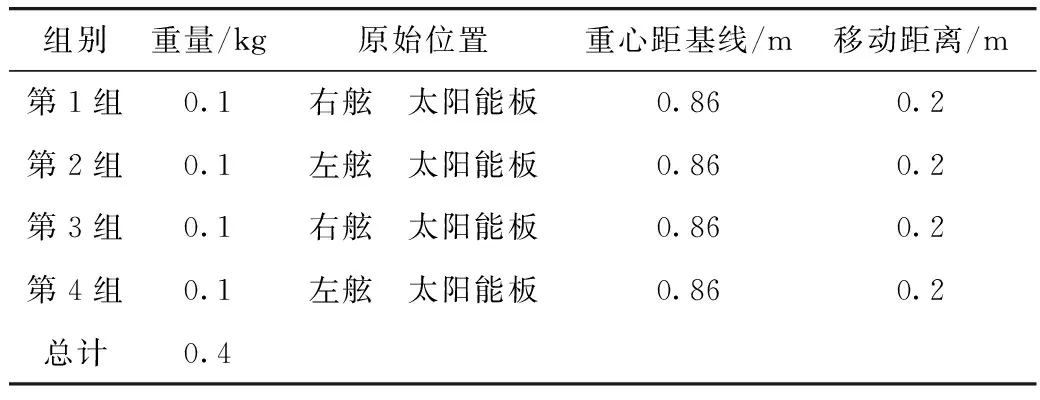
表3 倾斜试验重物布置情况Tab.3 Weight arrangement in inclining experiment
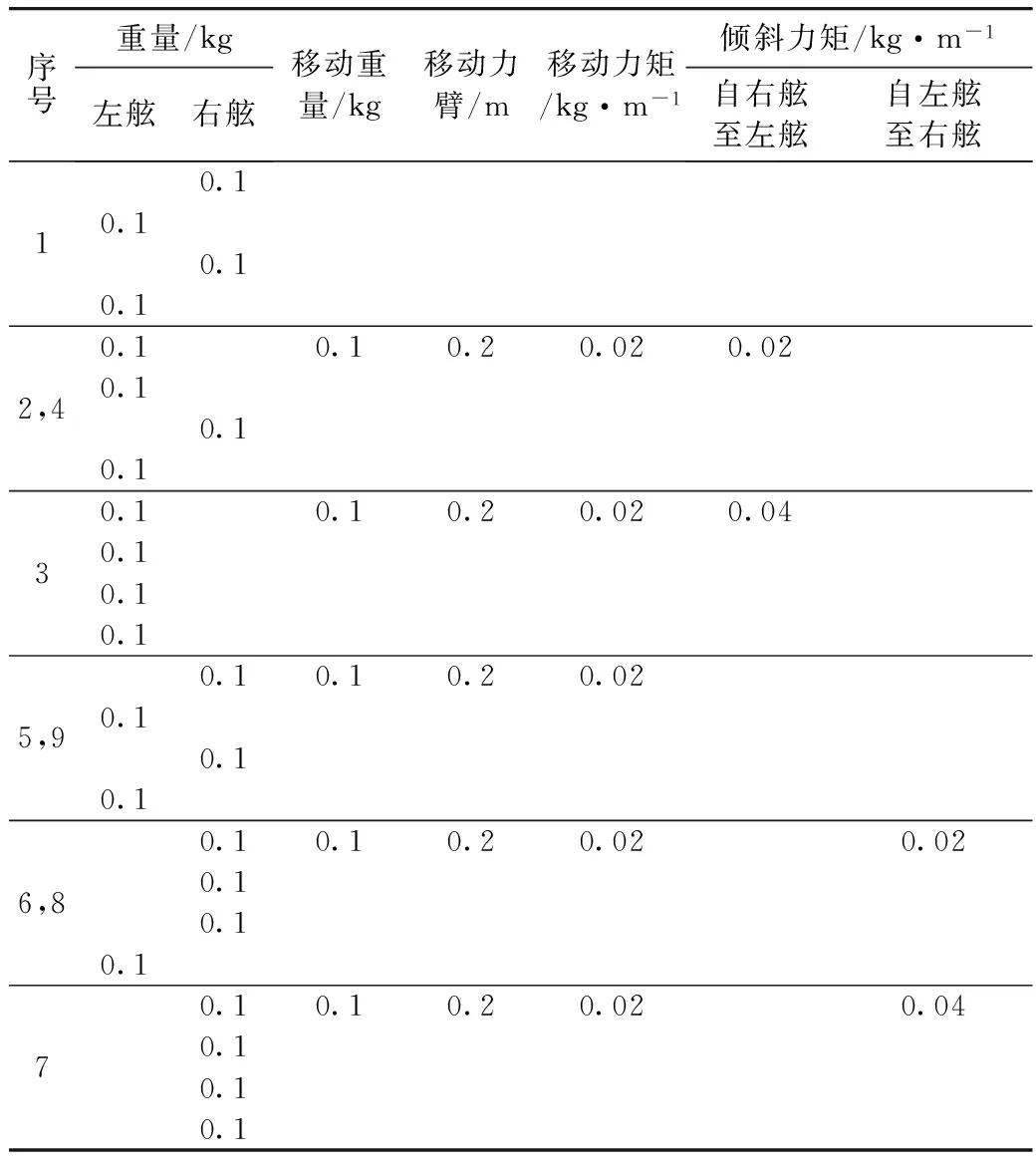
表4 倾斜试验重物移动情况Tab.4 Moving condition in inclining experiment
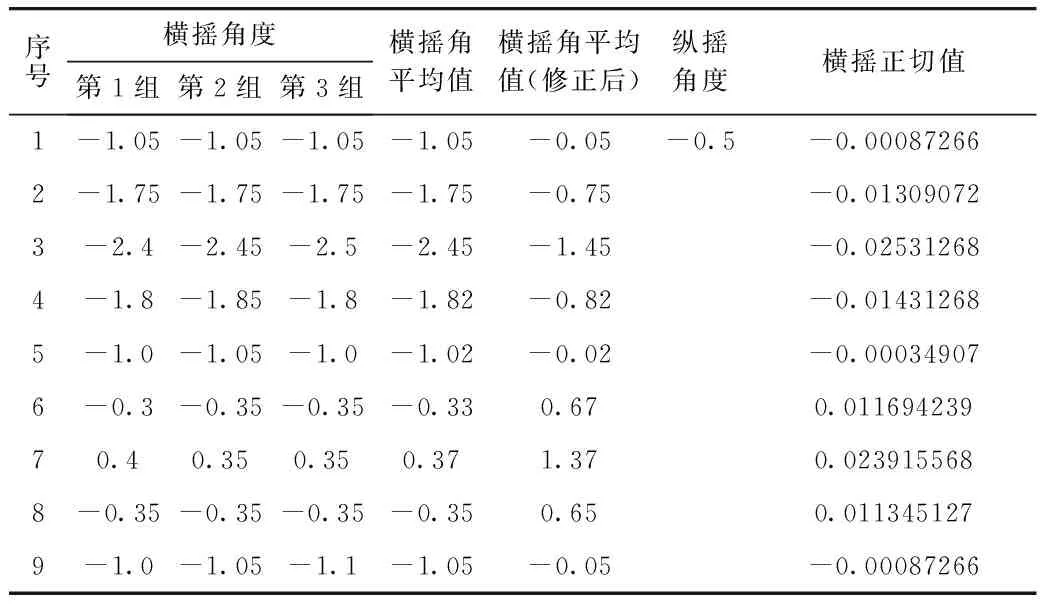
表5 倾斜试验结果记录表Tab.5 The results form of inclining experiment
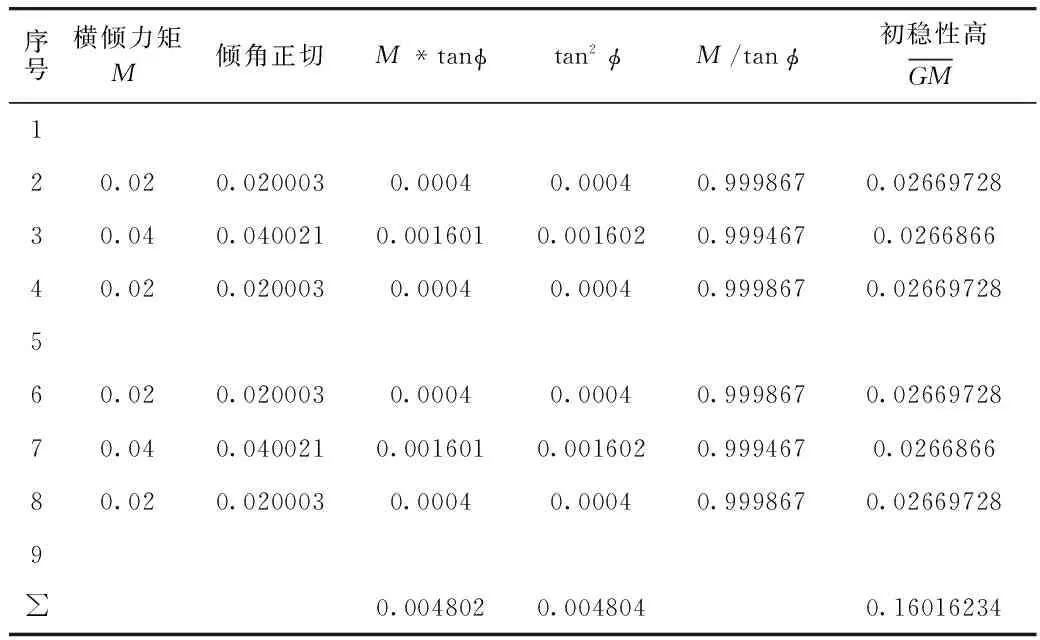
表6 初稳性高计算表Tab.6 Calculating tables of metacentric height
初稳性高计算:
(3)
(4)
由式(3)和式(4)可知,采用算数平均值算法和最小二乘法计算的GM值相同。
试验时海洋平台重心垂向坐标计算:
1.269/30=0.443m,
与SolidWorks软件计算结果0.445误差为0.5%。
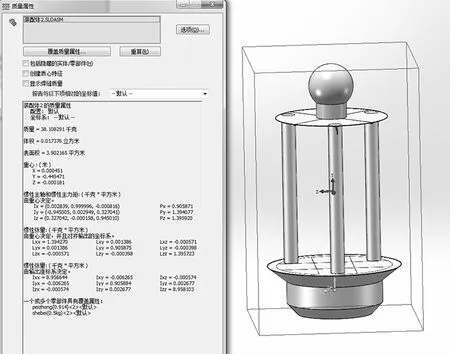
图11 SolidWorks计算结果Fig.11 Calculating result of SolidWorks
3 结 语
本文基于CCS规范完成了新型半潜式海洋通信平台的结构设计,运用SolidWorks软件计算出平台的重心、浮心。运用AH-100BAHRS航姿控制系统对海洋平台的倾角进行测量并记录数据,将倾斜试验计算结果与软件计算结果进行对比,误差仅为0.5%,满足工程要求,对未来船舶与海洋工程结构物的倾斜试验有重要参考意义。
[1] 陈新权, 刘振辉, 谭家华.深海半潜式平台选型研究[J].中国海洋平台,2008(1):7-13.
CHENXin-quan,LIUZhen-hui,TANJia-hua.Astudyonsemisubmersibletypesindeepwater[J].ChinaOffshorePlatform,2008(1):7-13.
[2] 中国船级社.海上移动平台入级规范[S],2012.
ChinaClassificationSociety(CCS).RulesforConstructionandclassificationofmobileoffshoredrillingunits[S],2012.
[3] 盛振邦, 刘应中.船舶原理[M].上海:上海交通大学出版社,2003:72-78.
SHENGZhen-bang,LIUYing-zhong.Shippingpriciple[M].Shanghai:ShanghaiJiaotongUniversityPress,2003:72-78.
[4] 中国船级社.船舶倾斜试验与静水横摇试验实施指南[S],1996.
ChinaClassificationSociety(CCS).Rulesforshipincliningtestandhydrostaticrollingtest[S],1996.
[5] 顾恩凯, 黄维平, 孙铭远.自升式钻井平台倾斜试验方法研究[J].中国造船,2011,52(S1):140-146.
GUEn-kai,HUANGWei-ping,SUNMing-yuan.Studyonmethodofincliningtestofjackuprig[J].ShipbuildingofChina,2011,52(S1):140-146.
[6] 刘新宝, 程龙, 曹士峰, 等.悬臂梁式钻井平台倾斜试验方法探索[J].中国造船,2011,52(S1):148-152.
LIUXin-bao,CHENGLong,CAOShi-feng,etal.Incliningtestmethodofoffshoredrillingplatformwithcantilever[J].ShipbuildingofChina,2011,52(S1):148-152.
[7]LOWYM.Frequencydomainanalysisofatensionlegplatformwithstatisticallinearizationofthetendonrestoringforces[J].MarineStructures,2009,22(3):480-503.
[8]HIRDARISSE,BAIW,DESSID,etal.Loadsforuseinthedesignofshipsandoffshorestructures[J].OceanEngineering,2014,78:131-174.
[9]MORANDIAC,FRIEZEPA,BIRKINSHAWM,etal.Jack-upandjacketplatforms:acomparisonofsystemstrengthandreliability[J].MarineStructures,1999,12(4-5):311-325.
[10] 由广辉,窦培林.浮动隔声结构在自升式海洋平台上的应用[J].舰船科学技术,2011,36(3):121-125.
YOUGuang-hui,DOUPei-lin.Applicationoffloatingsoundinsulationstructureinjack-upplatform[J].ShipScienceandTechnology,2011,36(3):121-125.
Study on structure design and inclining experiment of semi-submersible communications platform
MEI Lei1,LI Hong-yuan1,2,WANG Da-zheng1,WANG Xin2,XU Li1,LIU Chang3, REN Dong-liang1
(1.School of Naval Architecture and Ocean Engineering, Harbin Institute of Technology at Weihai,Weihai 264209,China; 2.National Ocean Technology Center,Tianjin 300112,China;3.Jiangsu University of Science and Technology,Zhenjiang 212003,China)
Based on CCS
semi-submersible platform; structure design; inclining experiment
2014-09-23;
2015-04-30
中国电子科技集团资助项目;山东省科技厅资助项目(2013GGA10065)
梅蕾(1981-),女,博士,讲师,从事复合材料船舶设计建造研究。
U663.2
A
1672-7649(2015)10-0128-05
10.3404/j.issn.1672-7649.2015.10.027
猜你喜欢
房地产导刊(2022年5期)2022-06-01
建材发展导向(2022年6期)2022-04-18
海洋石油(2021年3期)2021-11-05
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年7期)2021-07-16
全球定位系统(2020年3期)2020-07-15
发明与创新·中学生(2018年10期)2018-10-15
家庭百事通·健康一点通(2017年9期)2017-09-22
创新作文(1-2年级)(2017年1期)2017-04-19
科学中国人(2016年1期)2016-01-13