水下平台液舱的水量测量及压力差控制系统研究
2015-06-05 15:24阳世荣
舰船科学技术 2015年10期
阳世荣
(中国舰船研究设计中心,湖北 武汉 430064)
水下平台液舱的水量测量及压力差控制系统研究
阳世荣
(中国舰船研究设计中心,湖北 武汉 430064)
介绍一种水量测量及压力差控制系统,可用于水下平台不规则液舱内部水量的准确测量,并可控制液舱与舷外海水之间的压力差。提出的水量测量方案能够减小由于液舱形状不规则、注排水期间液面波动以及水下平台纵横倾等引起的测量误差,压力差控制方案利用水下平台携带的压缩空气,能够将液舱与舷外之间的压力差控制在设定的范围之内。重点说明系统整体方案、软硬件技术方案及陆上验证试验。研究结果表明,该系统为水下平台的浮力调整和不平衡力矩调节提供技术基础。
水下平台;液舱;水量测量;压力差控制;陆上验证试验
0 引 言
液舱是水下平台的重要组成部分,通过对液舱进行注排水改变液舱内的水量即可调节水下平台的重力、浮力平衡关系以及力矩平衡关系,从而实现水下平台的深度及姿态控制。因此,水下平台液舱内部水量的精确测量以及液舱与舷外之间注排水流量的准确控制十分重要。另一方面,也可为水下平台浮态、稳性计算及作出抗沉辅助决策提供相关数据[1]。由于水下平台的液舱为密闭液舱,为充分利用空间,液舱形状多不规则,给液舱内水量的精确测量带来了不利影响;注排水期间导致的液舱内液面波动会引起液位测量不准确,从而产生液舱内的水量测量误差;水下平台的纵横倾也会引起液位测量失准而产生水量测量误差。另一方面,水下平台液舱与舷外之间的注排水一般采用“泵排自注”的方式,即利用舷外海水压力实现舷外海水自流注入液舱,利用排水泵将液舱内的海水排出舷外。随着水下平台工作深度的增加,舷外海水压力随之增加,舷外与液舱内之间的压力差也随之增加,导致液舱自流注水速度大幅增加,而水泵排水速度迅速降低,不利于液舱与舷外之间注排水流量的准确控制。除此以外,当舷外与液舱内之间的压力差增加后,所需的排水泵功率也随之增加,受限于排水量,水下平台携带的电能有限,常规的“泵排自注”方式也难以满足水下平台的用电节能要求。
为解决上述问题,本文介绍一种水量测量及压力差控制系统,能够减少或消除液舱内液位的测量误差,提高水量测量精度,并实现液舱与舷外之间的压力差控制。本文对该系统的原理、技术方案、软硬件开发和陆上验证试验等做重点说明。
1 水量测量精度的影响因素分析
1)液舱形状不规则导致的测量误差
水下平台液舱的水量测量一般采用静压测量法[2-3],即通过液位变送器测量液位高度,再由水量测量装置依据液舱的液位-舱容曲线,计算出水量。受限于水下平台外部线型及内部布置条件,液舱通常为形状不规则的密闭液舱,其液位-舱容曲线也为不规则曲线。在工程实际中,一般在水下平台的建造期间对液舱进行舱容标定试验,获得数据量有限的液位-舱容数值表。当实际的液位测量值落在2个离散数值之间时,会导致水量计算出现误差。
2)注排水期间,液舱内液面波动引起的水量测量误差
水下平台为抵消浮力差和不平衡力矩,经常需要对液舱进行注排水,注排水期间发生的液面波动导致液位测量不准,从而大大影响水量测量精度。
3)艇体发生纵倾、横倾时引起的水量测量误差
水下平台在水下不可能完全受力平衡,总是存在一定的纵倾或横倾,纵横倾期间,液舱内液面仍保持水平,但是舱内液面与液位变送器的相对位置会发生变化,因此液位测量值与真实值之间存在偏差,也会导致水量测量精度下降。
2 舷外与液舱内压力差控制原理
当水下平台的工作深度变化时,常规的“泵排自注”方式无法主动控制舷外与液舱内压力差。由于水下平台一般均配置了数量较多的压缩空气瓶,因此可充分利用水下平台携带的压缩空气资源,通过对液舱的进气加压和放气减压,调节液舱内的压力,保持舷外与液舱内之间的压力差始终在一定的范围之内,从而实现压力差可控。通过实施压力差控制,液舱内的压力始终比舷外低,仍可利用舷外压力实现舷外海水自流注入液舱,同时,由于液舱内充入了压缩空气,舱内压力增加,可平衡一部分舷外海水压力,从而减小了排水泵的排水背压,利用小功率的排水泵即可实现大深度排水,显著减少了排水泵的电能消耗。另一方面,压力差是影响液舱与舷外之间的注排水速度、噪声的重要因素,因此,通过控制舷外与液舱内之间的压力差还可调节液舱注排水速率,从而提升注排水控制精度并降低注排水噪声。
3 系统技术方案
水下平台液舱的水量测量及压力差控制系统主要包括主机、液位变送器、压差变送器、双向电磁流量计、倾角传感器以及进排气控制阀等,其原理框图如图1所示。
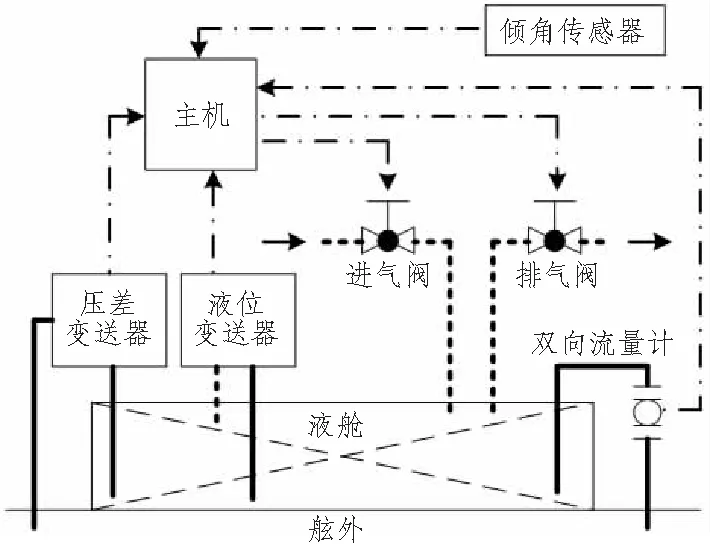
图1 控制系统原理框图Fig.1 The principle block diagram of control system
图1中,“——”代表水管路,“……”代表气管路,“—·—”代表电气回路。其中,液位变送器的高压端口通过水管路连通液舱的底部,液位变送器的低压端口通过气管路连通液舱顶部的气腔,其测得的水舱顶部和底部的压力之差即可直接转换为液舱内的液位信号;压差变送器的高压端口通过水管路连通舷外,压差变送器的低压端口通过水管路连通液舱底部,可直接测得舷外与液舱内之间的压力差;液位、压差变送器通过电气接口与主机连接,以4~20 mA标准电流信号向主机传送液位和压力差测量值。进气阀和排气阀分别安装于液舱的进气、排气管路上,由主机遥控开启和关闭。双向电磁流量计安装于液舱的注排水管路上,并通过电气接口以4~20 mA标准电流信号向主机传送注排水流量测量值。倾角传感器安装于水下平台的重心位置,通过远程通信接口向主机发送水下平台的纵横倾角度测量值。
本系统技术方案提高液舱内水量测量精度的工作原理如下:
1)在非注排水期间,采用静压测量法,由液位变送器测量液舱底部与顶部气腔之间的压力差(该压力差与水舱内液位高度成正比),输出液位测量信号给主机,由主机的水量测量程序依据液舱的液位-舱容数值表计算水量值。为提高测量精度,在主机的软件程序中采用插值算法,当实际液位测量值落在液舱液位-舱容数值表的2个离散数值之间时,根据多项式插值算法进行水量计算,保证了水量测量的精确度。
2)主机采集液舱注、排水流量信号,判定是否处于注排水阶段。当处于注排水阶段时,将注排水之前测得的液舱水量值与注排水流量值进行累加,作为注排水阶段的液舱水量的测量结果;当注排水结束后,液面恢复平静,水量测量采用静压测量法。从而消除因为液面波动而引起的误差。
3)主机通过接收到的艇体纵、横倾角度信号,结合液位变送器的实际安装位置距离水下平台重心位置的偏差,对液位测量值进行修正,修正后的液位值即为液舱的真实液位,然后再根据液位-舱容曲线计算水量值,从而消除艇体纵横倾引起的水量测量误差。
本系统技术方案控制注排水压力差的工作原理如下:
1)利用水下平台携带的压缩空气瓶作为气源,连接通往液舱的进气管路。
2)主机通过压差变送器测量舷外与液舱内之间的压力差,并与设定的压力差范围进行比较。
3)当舷外与液舱内之间的压力差过大时,主机控制进气阀对液舱进气加压,提高液舱内压力从而减小压力差。
4)当舷外与液舱内之间的压力差过小时,主机控制排气阀对液舱放气减压,减小液舱内压力从而增大压力差。
上述工作原理均需通过系统主机得以实现,因此主机是本系统的核心设备,主机的硬件及软件设计是实现水量测量、压力差控制等系统功能的技术基础。
4 主机硬件方案
主机硬件电路采用以高性能PIC单片机18F4580为核心的电路系统,主要由单片机处理器、AD转换电路、信号调理电路、阀门控制电路、LED显示电路、声光报警电路、通信接口电路、电源模块及外部存储电路等部分组成。其硬件电路原理如图2所示。
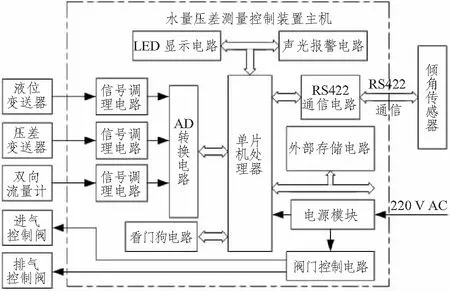
图2 主机硬件电路原理框图Fig.2 The principle block diagram of the host hardware circuit
主机硬件电路各组成部分的主要功能如下:
1)单片机处理器,是整个设备的运算和控制核心,完成数字滤波处理、液位/水量数值转换、压差及流量数据采集等数字计算,并实现通信、显示、报警及阀门控制。单片机处理器采用PIC 18F4680芯片,该芯片集成度高、功耗低、稳定性好、最高工作频率可达40 MHz,特别适合船用环境下的现场测控场合[4]。
2)A/D转换芯片及信号调理电路,将差压变送器、液位变送器、双向流量计输出的4~20 mA模拟信号转换为数字量。A/D转换芯片采用AD公司的16位转换器AD7706,具有分辨率高、动态范围广、自校准等特点,非常适合工业领域的温度、压力、流量等精确测量场合[5-6]。
3)通信接口电路,实现与倾角传感器的数据通信,接收水下平台的纵倾、横倾角测量参数。通信接口电路由2片MAX485芯片构成,MAX485是MAXIN公司推出的低功耗串行收发器芯片,内部集成接收器和驱动器[7],采用双芯片配置由不同芯片分别承担发送、接收信息任务,提高了通信可靠性。
4)片外大容量存储器,具有掉电自保持功能,用于记录液舱液位、水量、压力差和注排水流量等数据的运算处理结果,以及从倾角传感器接收到的纵倾、横倾角值等参数。片外大容量存储器采用24LC64 EEPROM芯片,体积小、可靠性高、功耗低、可断电保持数据200年以上,擦写次数可达10万次[8],可满足本系统数据在线记录要求。
5)显示报警电路、液舱水量和压力差数值,能实现声光报警功能。
6)阀门控制电路,将PIC单片机IO口输出的控制信号转换为阀门驱动信号,以控制进气阀、排气阀的开启和关闭,并采集阀门开启、关闭状态,传送给PIC单片机。
7)电源模块,向主机硬件电路系统提供工作电源,并向阀门控制电路提供驱动电源。
主机的基本工作流程为:液位、压差变送器及双向流量计输出的4~20 mA测量信号经信号调理和AD转换后,送入PIC单片机进行数据处理,得到液位、压力差和注排水流量测量数值,同时,PIC单片机通过串口通信程序获取倾角传感器发送的纵倾、横倾角测量值;另一方面,PIC单片机运行水量测量程序,将液位测量数值转换为水量数值,并将水量数值和压力差数值送至主机面板的LED上显示。如果水量、压力差数值超过设定的限值,则发出声光报警。如果舷外与舱内之间的压力差过大,主机遥控开启进气阀向液舱实施进气加压,以减小压力差;如果舷外与舱内之间的压力差过低,主机遥控开启排气阀对液舱实施排气减压,以增加压力差。从而将舷外与舱内之间的压力差保持在一定范围之内。
主机为独立箱体结构,箱体面板上布置有LED数码显示屏、电源开关、报警指示灯、蜂鸣器和消音按钮。箱体上布置有7个电连接器,分别提供电源、液位变送器、压差变送器、双向流量计、进气阀、排气阀电气接口和远程通信接口。主机面板示意图如图3所示。

图3 主机面板示意图Fig.3 The schematic diagram of the host panel
5 主机软件方案
主机软件的主要功能包括:
1)程序初始化设置;
2)液位、压力差及注排水流量测量信号的AD转换与数据预处理;
3)液舱内水量精确计算,包括液位多项式插值修正、流量修正及纵横倾修正等;
4)压力差数值换算;
5)与倾角传感器进行通信,接收水下平台的纵倾、横倾角测量值;
6)水量、压力差数值的就地显示;
7)水量、压力差越限声光报警;
8)进气阀、排气阀的遥控开启和关闭,以及阀位状态采集。
主机软件为嵌入式应用软件,其开发环境采用Microchip公司出品的PIC单片机集成开发环境MPLAB IDE,MPLAB IDE集成了代码编辑及编译、项目管理和调试开发等多项功能,支持汇编语言、C语言等[9],其操作系统平台为Windows XP。为提高软件代码的可移植性,编程语言采用C语言[10]。
主机软件的设计流程略。
以某水下平台为例,设纵倾角θ(°)、横倾角φ(°)、传感器到重心的纵向距离x(m)、横向距离y(m),直接测量的液位为hc(m),修正后液位为h(m),则纵横倾角液位修正公式如下:
h=(hc+xsinθ)cosθ+4.3(1-cosφ)-ysinφ。
(1)
纵横倾期间,采用式(1)对实测的液位值进行修正,再依据修正后的真实液位值计算液舱内水量,从而消除因水下平台纵横倾而引起的水量测量误差。
6 陆上验证试验
本系统在应用于水下平台之前,需开展陆上验证试验,通过充分的试验,验证系统功能和性能、化解技术风险,陆上试验系统原理图如图4所示。
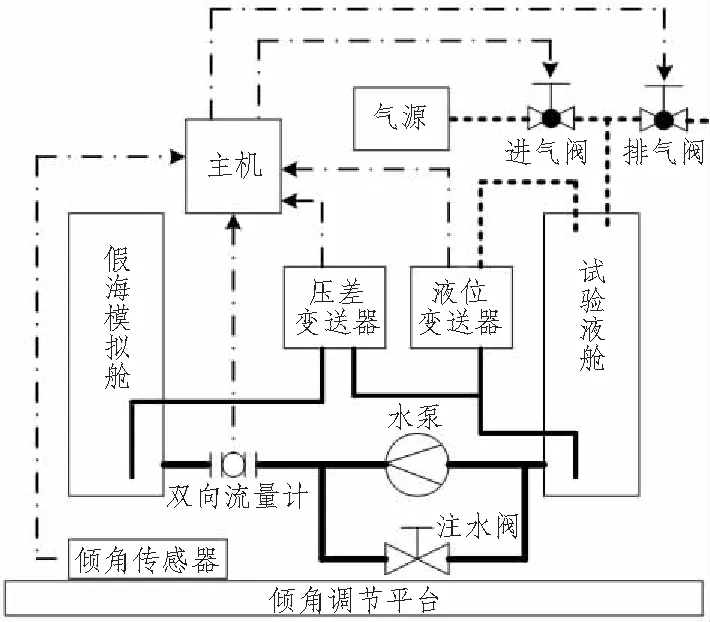
图4 陆上试验系统原理图Fig.4 The schematic diagram of test system on land
图4中,假海用于模拟舷外海水及其深度变化;试验液舱用于模拟水下平台液舱,且设有机械测水柱,可观测到液舱内实际水量;水泵和注水阀用于实现液舱与假海之间的注排水;气源用于提供压力差控制所需的压缩空气;整个试验系统安装于一个倾角调节平台上。压差变送器的高、低压端口分别连接假海模拟舱和试验液舱底部实现液舱与舷外海水间压力差测量,液位变送器高、低压端口分别连接试验液舱的底部和顶部,实现试验液舱内液位测量。主机通过控制进气阀、排气阀,对试验液舱实施进气加压和排气减压,从而实现试验液舱与假海之间的压力差控制。倾角传感器安装于倾角调节平台的测量平面,可测量平台的纵横倾角度。
陆上试验的主要内容为:通过水泵或注水阀改变试验液舱的水量,检查本系统静态水量测量以及注排水期间水量测量的准确性;通过倾角调节平台模拟纵横倾,检查本系统在纵横倾期间水量测量的准确性;通过假海模拟舱模拟舷外深度变化,检查本系统压力差控制功能的正确性。
7 结 语
本文介绍的水量测量及压力差控制系统可实现水下平台不规则密闭液舱内部水量的准确测量,并可将舷外海水与液舱内之间的压力差控制在设定的范围内,可提高液舱与舷外之间交换水量的控制精度,从而为水下平台的浮力调整及不平衡力矩调节提供了技术基础。本文介绍的水量测量方案及单片机测控电路系统具有一定的通用性,可适用于石油、化工、冶金等行业不规则液舱水量测量应用场合。
[1] 刘喜元,黎汉军.船舶液体舱液位遥测方法及数据分析[J].船海工程,2005(4):10-12.
LIUXi-yuan,LIHan-jun.Thetelemeteringmethodofcapacityoftheliquidtanksanddataanalysis[J].Ship&OceanEngineering,2005(4):10-12.
[2] 焦仁普,庄庆德,王艳菊.智能化铁路罐车液位测量系统的设计[J].传感器与微系统,2007,26(3):53-55.
JIAORen-pu,ZHANGQing-de,WANGYan-ju.Designofintelligentsystemforliquidlevelmeasurementofrailwaytanker[J].TransducerandMicrosystemTechnologies,2007,26(3):53-55.
[3] 孙艳秋.基于PLC的船舶阀门遥控及液位遥测系教学实训系统设计[J].船海工程,2014,43(1):75-77.
SUNYan-qiu.DesignofpracticaltrainingsystemformarinevalveremotecontrolandlevelremotegaugingbasedonPLC[J].Ship&OceanEngineering,2014,43(1):75-77.
[4] 周鹏,王启增,毛文华,等.基于PIC18F4580的粮食称重系统设计[J].电子设计工程,2011,19(12):175-177.
ZHOUPeng,WANGQi-zeng,MAOWen-hua,etal.GrainweightsystemdesignbasedonPIC18F4580[J].ElectronicDesignEngineering,2011,19(12):175-177.
[5] 朱涛.AD7705/AD7706与PIC16F73的接口配置[J].电子工程师,2006,32(8):51-52.
[6] 夏燕兰.称重测控系统的A/D转换电路设计[J].微电机,2011,44(2):114-115.
XIAYan-lan.DesignoftheA/Dcircuitinthetestingandweighingcontrolsystem[J].Micromotors,2011,44(2):114-115.
[7] 石彦辉,高蒙,李拓新.RS485总线在智能供电系统中的应用[J].微计算机信息,2007,23(5-2):179-180.
SHIYan-hui,GAOMeng,LITuo-xin.TheapplicationofRS485busintheintelligentpowersupplysystem[J].Control&Automation,2007,23(5-2):179-180.
[8] 阳世荣.舰船直流幅压电网短路电流录波装置研究[J].舰船电子工程,2010,30(9):187-191.
YANGShi-rong.Researchonthewave-recordingdeviceofshortcurrentinDCvoltage-variationgridofship[J].ShipElectronicEngineering,2010,30(9):187-191.
[9] 薛红军,陈德荣,王林涛.基于PIC18F452的传送带控制系统的设计[J].工业控制计算机,2008,21(2):82-83.
XUEHong-jun,CHENDe-rong,WANGLin-tao.TransmittingbandcontrolsystembasedonPIC18F452controller[J].IndustrialControlComputer,2008,21(2):82-83.
[10] 武锋,陈建新.PIC单片机C语言开发入门[M].北京:北京航空航天大学出版社,2005.
[11] 阳世荣.基于TMS320F2812的船舶电网短路电流自动录波软件设计与实现[J].机电工程,2014,31(10):1328-1332.
YANGShi-rong.Designandimplementationofautowave-recordingsoftwareofshortcurrentinshippowergridsbasedonTMS320F2812[J].Mechanical&ElectricalEngineeringMagazine,2014,31(10):1328-1332.
Research on tank water volume measurement and pressure difference control system of underwater platform
YANG Shi-rong
(China Ship Development and Design Center,Wuhan 430064,China)
A water volume measurement and pressure difference control system is introduced.The system can be used for water volume accurate measurement in the irregular water tank of underwater platform and control the pressure difference between water tank and outboard.The water volume measurement scheme which is presented can reduce the measurement error caused by the irregular shape of tank, liquid surface fluctuation during water inflow and outflow and trim and heel of underwater platform.The pressure difference control scheme can use the compressed air in the underwater platform to make the pressure difference keep in the setting range.The overall scheme of the system, the technical scheme of software and hardware and the demonstration testing on land are highlighted.The results indicate that the system can provide technical foundation for the buoyancy adjusting and unbalance torque regulation of underwater platform.
underwater platform; tank; water volume measurement; pressure difference control; demonstration testing on land
2015-03-30;
2015-04-20
阳世荣(1980-),男,硕士,工程师,研究方向为电力系统自动化。
U661.4
A
1672-7649(2015)10-0030-06
10.3404/j.issn.1672-7649.2015.10.007
猜你喜欢
节能与环保(2022年3期)2022-04-26
商品与质量(2021年40期)2021-12-05
海洋石油(2021年3期)2021-11-05
空间科学学报(2020年3期)2020-07-24
电子技术与软件工程(2019年16期)2019-09-17
电子制作(2018年12期)2018-08-01
山东工业技术(2016年15期)2016-12-01
汽车维护与修理(2015年2期)2015-02-28
中国科技纵横(2014年15期)2014-12-11
科技传播(2012年10期)2012-06-06