一种新型经椎弓根螺钉动力内固定系统的设计和力学测试
2015-06-01 10:50:01郑晓勇赵东升马远征张智吴广森侯树勋
生物骨科材料与临床研究 2015年4期
郑晓勇赵东升马远征张智吴广森侯树勋
一种新型经椎弓根螺钉动力内固定系统的设计和力学测试
郑晓勇1赵东升1马远征1张智1吴广森1侯树勋2
目的设计一种新型经椎弓根螺钉动力内固定系统,并测试其对失稳腰椎的稳定性效果及对相邻节段的作用。方法 1采用6具人新鲜尸体腰椎标本,测试各个节段的活动度,为新型动力内固定系统的设计提供参数支持。2以钛合金棒、钛缆和钛合金碟片弹簧为主要结构,根据正常腰椎各节段的活动度,参照文献报道的相关测试结果,设定动态连接棒屈曲范围0~10°,旋转范围0~5°,并对其进行了相关力学测试。3制作腰椎失稳模型,测试新型动力内固定系统固定后失稳腰椎固定节段及相邻节段的运动范围(ROM)和中性区(NZ),并与坚强固定对比,同时测定其上邻节段软骨终板下压力,探讨其稳定性及对相邻节段的作用。结果 与完整脊柱相比,新型动力内固定系统固定后屈伸和侧屈方向的ROM和NZ较完整脊柱减小(<0.05),但旋转方向的ROM和NZ与完整脊柱无显著性差异(>0.05)。与坚强固定组相比,新型动力内固定组三个主方向的ROM和NZ均显著增加,差异有显著性意义(<0.01)。疲劳试验后的结果表明,固定节段在三个主方向上的ROM和NZ均较疲劳前显著增加(<0.05),但与失稳脊柱相比,差异仍具有显著性意义,与完整脊柱相比,动力内固定屈伸方向的ROM和NZ仍较小,两组相比差异显著(<0.05),侧屈与旋转方向的ROM和NZ与完整脊柱无显著性差异(>0.05)。结论新型动力内固定系统可控性强、可靠性好、能够提供足够的活动度。新型动力内固定系统能对失稳腰椎提供各方向上的稳定性,尤其对前屈后伸的稳定效果最好,疲劳试验后也能提供足够的稳定性。相邻节段的ROM和上邻节段终板下压力与固定方式无显著相关。
动力内固定;非融合技术;腰椎;生物力学
动力内固定技术属于非融合技术的一种。动力内固定的目的是改变运动节段载荷的形式,控制运动节段的异常活动[1]。设想通过提供接近生理状态的载荷传导和控制异常的位移来减轻甚至避免相邻节段的退变,并减轻疼痛。因此,设计一种新型动力内固定器械的原则就是不仅能允许脊柱三个方向的活动,而且对于一个失稳脊柱而言,能够保证足够的稳定性,并坚固耐用。我们通过参照文献资料,自行设计了一种经椎弓根螺钉动力内固定系统,并获得国家实用新型专利(专利号:ZL 2009 2 0175651.9),现报告如下:
1 材料与方法
1.1 新型动力内固定系统的组织结构:
1.1 主要组织构件
选用已通过临床使用的外科植入物用钛合金材料,由动态连接棒、后开口"U"型椎弓根螺钉等组成,动态连接棒包括钛合金棒、缆线、碟片弹簧、销钉等(图1)。
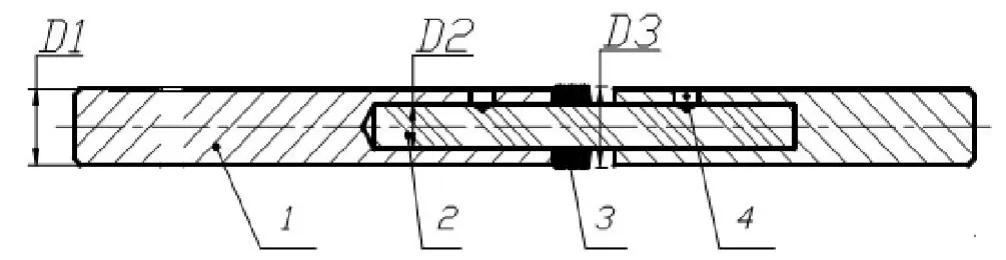
图1 动态连接棒结构示意图。1固定棒;2钛合金缆;3碟形弹片;4销钉。D1=6mm,D2=3.2mm,D3=6.4mm
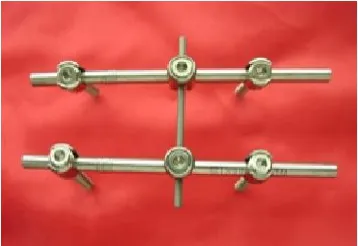
图2 由新型动态连接棒及椎弓根螺钉组成。动态连接棒型号规格:6mm×90mm;6mm×120mm
1.1.2 作用机理
钛缆和碟片弹簧提供一定的活动度及弹性,从而实现动力固定的目的。碟片弹簧参数如图所示(图3)(单位:mm):
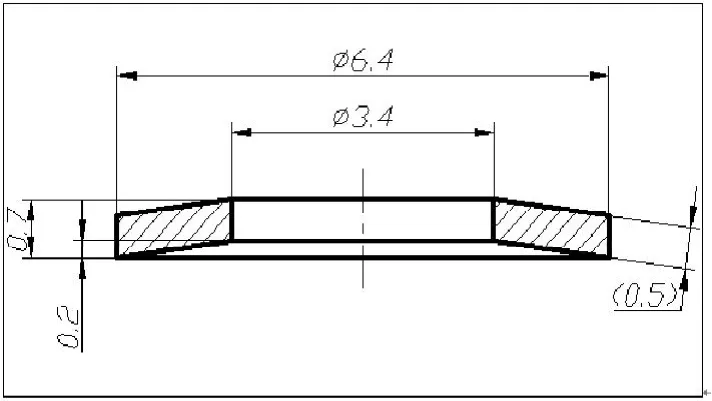
图3 碟片弹簧结构特点及参数
1.1.3 特点
钛缆绳特点:材质要求为钛合金,其牌号为TC4-M。总体外径为3.2mm。钛缆绳的缠绕方式:19制绳。
动力棒特点:可以提供后路足够的支撑,组织相容性好,耐磨损。设定其屈曲范围0~10°,旋转范围0~5°。
1.2 测试设备
包括弹簧称(分度值200g),万能角度尺,游标卡尺,百分表,特制夹具及相关扳手、MTS 858型材料测试系统(MTS公司,美国)、脊柱三维运动分析系统、压力传感器。
1.3 测试方法
随机抽取20枚动态连接棒。
1.3.1新型动力内固定系统的抗拉及抗压强度:用两个夹具分别夹紧钛缆连接体的两端。再将一端固定,在另一端施加一个力,测量这个力的大小。力从0开始逐渐增加,达到最大值时,停4~5秒撤去这个力。撤力后测量中间部分的伸长量。具体方法如图所示(图4)。抗压强度测量方法类似,只是力的施加方向相反。
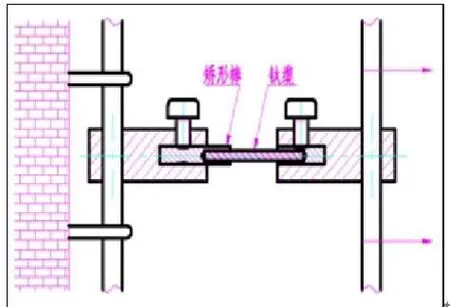
图4 动态连接棒的抗拉强度测试示意图
1.3.2 新型动力内固定系统的弹性形变:包括抗弯形变及抗扭形变。固定钛缆棒一端,使用弹簧称受力点在棒的另一端,向棒的垂直方向拉,记录受力端位移与受力数据。实验方法如图所示(图5、6)。

图5 动态连接棒抗弯测试示意图。1固定棒短端;2碟片弹簧区域;3固定棒长端。 :加载时,固定棒长棒轴线相对于初始状态偏转的角度;:卸载后,固定棒长棒轴线相对于初始状态偏转的角度

图6 动态连接棒抗扭测试示意图
1.4 实验标本及模型制备
实验标本:选取6具健康男性的新鲜尸体腰椎标本(L1-S1,来自南方医科大学解剖学教研室),排除腰椎外伤、变异、肿瘤和骨质增生等(年龄28~43岁,平均31.7岁)。标本用多层保鲜膜包裹后储存于-20°冰柜中。
实验制备:标本仔细去除肌肉组织,保留完整的前纵韧带和棘上韧带、棘间韧带,用聚甲基丙烯酸甲酯(自凝型,上海齿科材料厂)将T12和S1椎体分别包埋,并进行标记。
失稳模型制备(图7,彩图见插页):我们参照Schmoelz W等制作的模型,切除标本L3/4的棘上韧带、棘间韧带、黄韧带,切除双侧 L3椎体下关节突及 L4椎体上关节突内侧1/3,切开双侧关节囊及纤维环、摘除髓核。
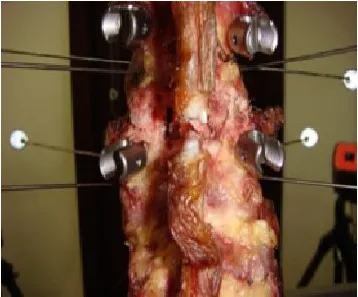
图7 尸体标本的腰椎失稳模型
终板软骨面隧道的制备(图8,彩图见插页):确定椎间盘中部为测量区,以游标卡尺准确测量 L2椎体下缘、L3椎体上缘前后径,确定椎体前后径中心点,以中心点为中心在 L2椎体下缘紧贴软骨终板处,依照压力传感器金属条大小钻出一个约1.0cm×1.0cm×1.0cm骨性隧道,利用磨钻小心去除椎体骨性终板,完整显露软骨终板,用粘合剂修饰平整以便测量。将传感器金属条插入骨性隧道,测试面与软骨终板紧密接触,按照传感器金属条大小将除软骨终板测试面的骨隧道其它三面用聚甲基丙烯酸甲酯进行有效重建。为了使测试具有一致性,我们测试时以隧道最外缘为起点,每次推进5mm直至传感器到达椎体的中央。所有加载均数据直接由MTS试验机采集,由数据采集仪器放大器放大后形成Excel文件,采集数据以10Hz的频率进行记录。
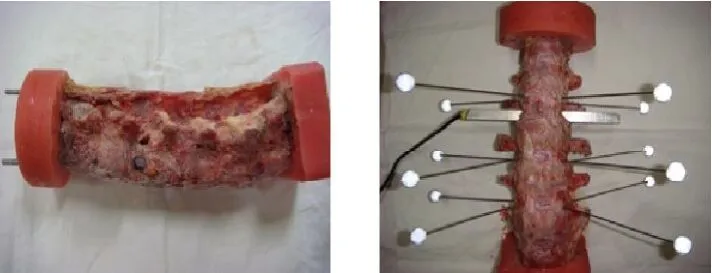
图8 终板软骨面隧道的制备及测试状态
1.5 疲劳试验
将标本置于MTS机器上进行100000次屈伸及旋转疲劳试验,频率2Hz,纵向载荷300N,旋转载荷40N,±8N.m扭矩(图9)。
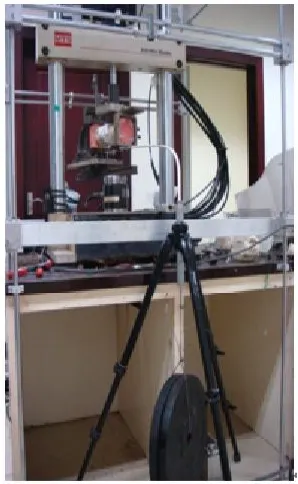
图9 标本动力内固定后行疲劳试验
1.6 统计学方法
应用SPSS16.0统计软件进行统计描述和分析。结果表示为(±s)的形式。
2 结果
2.1 新型动力内固定系统的抗拉强度及脱出力
固定棒所用材料的抗拉强度为(900±15)Mpa,缆线的抗拉强度应为(860±10)Mpa。钛缆从固定棒中拔出力为(800± 10)N,800N的作用力下,钛缆拉长(0.5±0.02)mm。
2.2 新型动力内固定系统的抗压强度
800N的作用力下,钛缆压缩(0.5±0.01)mm。
2.3 新型动力内固定系统的弹性形变
在25Nm的力矩作用下,动态连接器向一侧偏转的角度为(10±1)°;卸载后,动态连接器自动回弹,其永久变形量(5±1)°。在40Nm的力矩作用下,动态连接器向一侧旋转的角度为(5±1)°;卸载后,动态连接器自动回弹,其永久变形量≤1°。
2.4 固定节段的ROM(运动范围)和NZ(中性区)(表1,2)
结果表明,在三个主运动方向上,失稳模型的ROM和NZ均大于完整脊柱,差异有显著性意义(<0.01)。新型动力内固定系统和坚强内固定系统固定以后,标本三个主方向的 ROM和 NZ均明显小于失稳模型,差异有显著性意义(<0.01)。与完整脊柱相比,坚强内固定后三个主方向的ROM和NZ均明显减小(<0.01),新型动力内固定系统固定后屈伸和侧屈方向的ROM和NZ较完整脊柱减小(<0.05),但旋转方向的ROM和NZ与完整脊柱无显著性差异(>0.05)。新型动力内固定组与坚强固定组相比,三个主方向的ROM和NZ均显著增加,差异有显著性意义(<0.01)。
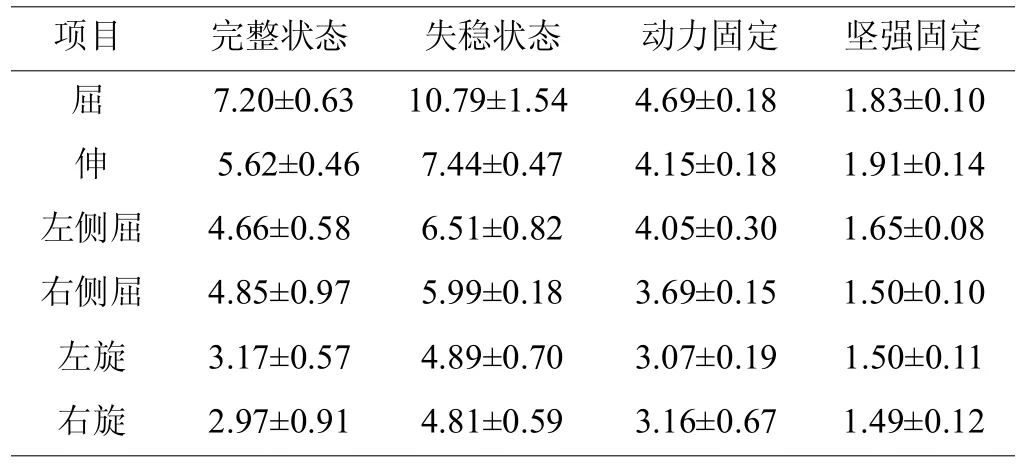
表1 L3/4节段在各种状态下的运动范围(°, ±s)
2.5 相邻节段的ROM(表3,4)
结果表明,对于相邻L2-3节段和L3-4节段,失稳模型的ROM稍小于完整脊柱,新型动力内固定和坚强内固定的ROM均稍大于完整脊柱,但各组之间并无显著性差异(>0.05)。
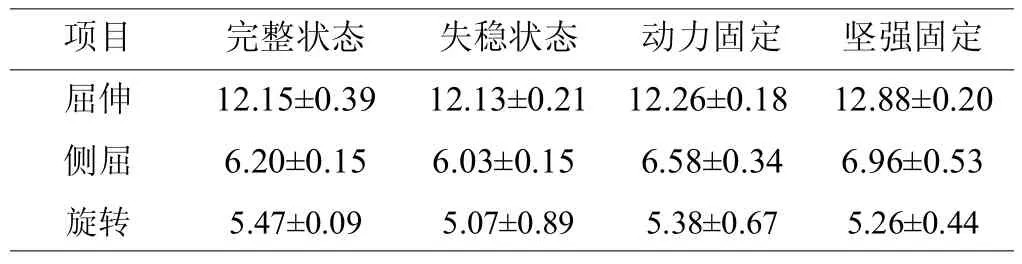
表3 L2/3节段在各种状态下的运动范围(°, ±s)
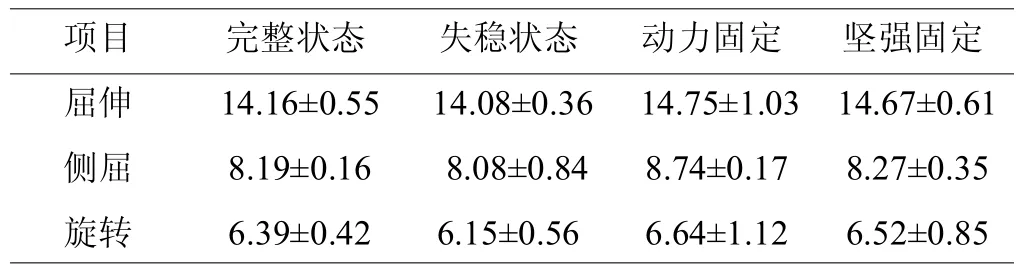
表4 L4/5节段在各种状态下的运动范围(°, ±s)
2.6 上邻节段的软骨终板下压力改变(表5):
结果表明,对于 L2下软骨终板下压力,各组之间并无显著性差异(>0.05)。

表5 各种状态下L2椎体下软骨终板下压力峰值(Mpa, ±s)
2.7 疲劳试验后固定节段的ROM和NZ(表6,7):
疲劳试验后的结果表明,L3/4在三个主方向上的 ROM和NZ均较疲劳前显著增加(<0.05),但与失稳脊柱相比,差异仍具有显著性意义,与完整脊柱相比,动力内固定屈伸和侧屈方向的ROM和NZ仍较小,两组相比差异显著(<0.05),旋转方向的ROM和NZ与完整脊柱无显著性差异(>0.05)。

表6 L3/4节段在疲劳试验后动力内固定节段的运动范围(°, ±s)
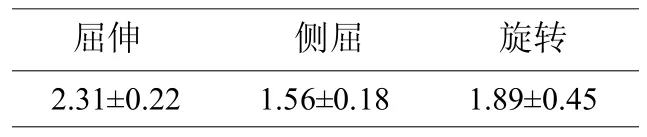
表7 L3/4节段在疲劳试验后动力内固定节段的中性区(°, ±s)
3 讨论
3.1 设计原则及理念
对于腰椎退行性疾病来讲,脊柱的载荷传导方式经常会发生改变。因此,通过改变退变节段的载荷传导方式可能会起到改善临床症状的功效,而且这种改变并不意味着腰椎运动节段的丧失。动力内固定在理论上可以达到这一标准[2]。设计一种新型动力内固定器械的原则就是不仅能允许脊柱三个方向的活动,而且对于一个失稳脊柱而言,能够保证足够的稳定性[3]。理论上讲,动力内固定以后最理想的活动度应该与无任何退变的运动节段完全相同。但是,由于个体之间的差异,而且考虑到螺钉的可能松动问题,理想的动力内固定器械应该是保证固定节段的活动度稍小于正常。而且动力内固定目前面临的主要问题就是如何在脊柱的稳定性和器械载荷之间找到平衡点[4]。目前尚无令人信服的研究成果报道。
动力内固定系统应该在固定节段运动正常运动范围内分享椎间盘和小关节的载荷。理想的动力内固定系统应该是既能达到载荷分享的目的,而且经久耐用。因此,综合对比现有的内固定材料,钛合金材料应该是首选。在此基础上,应用钛合金材料设计成一种既能提供足够的弹性,又能在各个方向上提供一定的活动度的结构就成了我们设计的方向。
碟片弹簧是冲压成形的碟状垫圈式的弹簧,具有良好的缓冲作用。钛合金材料的碟片弹簧目前尚无医用的报道。该部分实验中,我们将钛合金碟片弹簧与钛合金缆结合起来,以期能够提供足够的弹性和活动范围。
通过前期的预实验,参照国内外文献报道结果及其它动力内固定系统[5,6],我们设定新型动力内固定系统的活动范围为:屈伸0~10°,旋转0~5°。
3.2 动态连接棒的结构特点及可控性
为了使动态固定棒既具有足够的弹性,又可提供一定范围内的活动度,前期的预实验中,我们初步设计出了一种新型的经椎弓根螺钉动力内固定系统,动态连接棒主要包括钛合金棒、钛缆和钛环,生物力学测试结果表明其能够对失稳腰椎提供足够的稳定性,但疲劳实验后的动力连接棒内部可以发现局部磨损的迹象,提示钛环结构容易产生接触点应力的集中,而且该结构略显僵硬,动态连接棒的活动范围也不易控制。参照国内外现有的动力内固定系统,并经过多次的预实验和动力棒结构调整,我们在初期研究的基础上对新型动力内固定系统进行了改进,将钛环结构改为钛合金碟片弹簧结构,内部钛缆的结构也进行了进一步的改良,预实验结果表明,改进后的动力内固定系统具有良好的生物力学性能,坚固耐用,可以提供足够的支撑及一定范围内的动态活动范围,同时,医用钛合金材料的使用也保证了其有良好的生物相容性。
碟片弹簧的特点主要有以下几点:在符合作用方向上尺寸较小,且能在很小变形时承受很大的负荷,适用于轴向空间要求紧凑的地方。与其他弹簧相比,其单位体积材料的变形较大。具有良好的缓冲作用,特别是采用叠合弹簧组合时,由于表面阻力很大,吸收冲击和振动的能力就更显著。正确设计制造的碟片弹簧,具有很长的使用寿命。由于内截锥高度和碟片厚度对弹簧特性的影响很大,因此碟形弹簧的制造质量要求较高。均匀界面的碟形弹簧,其截面内应力分布也不均匀,因而影响其疲劳强度和单位体积材料吸震能力提高。碟片弹簧常用于中性的机械设备,如机器或者武器中作用力强力缓冲和减震弹簧,也用于机动车的离合器或者安全阀,减压阀中的压紧弹簧,在自动化装置的控制机构中也有很大的应用,通过查阅国内外文献,我们未发现类似结构的动力内固定系统报道。本实验中,新型动态连接器通过缆线和碟片弹簧之间的相互作用,可以提供一定的屈曲度和弹性。实验数据表明缆线从固定棒中拔出的力≥800N。在25Nm的力矩作用下,动态连接器向一侧偏转的角度为(10±1)°。卸载后,动态连接器自动回弹,其永久变形量≤6°。在20Nm的力矩作用下,动态连接器向一侧旋转的角度为(5±1)°;卸载后,动态连接器自动回弹,其永久变形量≤1°。结果满足设计要求。
3.3 新型动力内固定系统对失稳腰椎的稳定性及对相邻节段ROM的影响
本实验中,我们参照SchmoelzW等制作的腰椎失稳模型,切除标本的棘上韧带、棘间韧带、黄韧带,切除双侧上位椎体下关节突及下位椎体上关节突内侧1/3,切开双侧关节囊及纤维环,摘除髓核。测试结果显示标本完整状态下L3/4的ROM和NZ与失稳状态相比差异有显著性意义,达到了试验设计的目的,成功地建立了腰椎的失稳模型。该模型相对于其它模型来说,对标本的损伤较大,因此,失稳节段的ROM也明显增大。这可能更能接近临床实际状态,也有助于我们更好的测试新型动力内固定系统的性能。
对于固定节段的稳定性,实验结果表明,坚强固定系统和动力内固定系统时,L3/4的各个方向的ROM和NZ与失稳状态相比,差异均有显著性意义,说明几种固定方式都可以很好的保持失稳腰椎的稳定性。新型动力内固定组与坚强固定组相比,三个主方向的ROM和NZ均显著增加,差异有显著性意义(<0.01)。结果显示,新型动力内固定系统固定后,相对于失稳模型,L3/4节段的屈曲ROM从10.79减小到4.69,伸展ROM从7.44减小到4.15,左侧屈ROM从6.51减小到4.05,右侧屈ROM从5.99减小到3.69,左旋转ROM从4.89减小到3.07,右旋转ROM从4.81减小到3.16(表1),减少率分别为57.06%、44.22%、37.79%、38.40%、37.22%和34.30%。这个结果明显优于已有报道的其它动力内固定系统,尤其是疲劳试验后仍能维持足够的稳定性,这显示了我们设计的新型动力内固定系统不仅能够保证足够的稳定性,而且提供了接近正常范围的活动度,这也为损伤椎间盘的自行修复提供了空间。
对于相邻节段的活动度影响方面,本实验中我们发现,动力内固定和坚强内固定相比,相邻节段的ROM均稍大于完整脊柱,各组之间并无显著性差异(>0.05)。这和文献报道其它的生物力学测试结果类似。
疲劳试验是检测一种内固定器械的重要指标。本试验中主要检测其疲劳试验后能否对失稳腰椎提供足够的稳定性。结果表明,分别经过100000次的屈伸和旋转循环负荷后,与完整脊柱相比,动力内固定屈伸和侧屈方向的 ROM和NZ仍较小,两组相比差异显著(<0.05),旋转方向的ROM和NZ虽变化稍大,但与完整脊柱相比无显著性差异(>0.05)。说明疲劳试验后,新型动力内固定系统仍能提供足够的稳定性,证明其是安全可靠的。
3.4 新型动力内固定系统对上邻节段终板下压力的影响
国外有研究表明,在脊柱损伤及退变的不稳定因素中,椎体本身只占38%,其余则归于椎间盘结构。其中上位椎间盘占不稳定因素的35%,下位椎间盘占27%,因此,本部分研究中,我们选择了上邻节段终板下压力作为研究对象。椎体终板下压力的改变与脊柱运动节段的退变密切相关。本实验中,我们去除标本的 L2椎体下骨性终板,完整显露软骨终板,测试面与软骨终板紧密接触,因此,该压力值直接反应了L2/3间隙的压力变化,由于椎间盘内压力测试对椎间盘本身有一定的损伤,而且难以标准化。因此,我们认为,终板下压力的测试可能更加可靠,也容易标准化。
脊柱融合术后,由于载荷的重新分布,融合节段的相邻椎间盘压力会相应发生改变,但已有的生物力学测试报道结果迥异。Cunningham等报道,脊柱融合术后,相邻节段的椎间盘压力在屈伸时明显增高。但Rohlmann等报道只是轻度增高。结果差异的最可能原因在于他们的测试模式不同。有的试验采用的是载荷控制模式,而有的则采用了位移控制模式。尽管如此,大多数学者仍然同意融合术导致了上邻节段活动度的增加,这可能会导致小关节压力的增加,从而引起一系列的临床症状。
本研究结果表明,对于 L2下软骨终板下压力,各组之间并无显著性差异(>0.05)。本研究中,我们采用的是短节段固定,这也提示我们,短节段的固定可能对相邻节段并无特殊影响。
本实验尚有许多不足之处。比如标本之间的个体差异,我们通过自身完整状态作为对照,最大限度的减少了偏倚的发生。另外,椎旁肌在维持脊柱的稳定性方面起着举足轻重的作用,我们的实验没有把该因素考虑在内,因此结果可能与正常生理状态有所差异。
[1] Kulduk A,Altun NS,Senkoylu A.Biomechanical comparison of effects of the Dynesys and Coflex dynamic stabilization systems on range of motion andloading characteristics in thelumbar spine: a finite element study[J].Int J Med Robot,2015,23.doi:10.1002/rcs.1636.
[2] Chopko B,Liu JC,Khan MK.Anatomic surgical management of chronic low back pain[J].Neuromodulation,2014,17(Suppl 2): 46-51.
[3] St John KR.The use of polyurethane materials in the surgery of the spine:a review[J].Spine J,2014,14(12):3038-3047.
[4] Fay LY,Wu JC,Tsai TY,et al.Dynamic stabilization for degenerative spondylolisthesis:Evaluation of radiographic and clinical outcomes[J].Clin Neurol Neurosurg,2013,115(5):535-541.
[5] Kiapour A,Ambati D,Hoy RW,et al.Effect of Graded Facetectomy on Biomechanics of Dynesys Dynamic Stabilization System [J].Spine,2012,37(10):581-589.
[6] Jahng TA,Kim YE,Moon KY.Comparison of the biomechanical effect of pedicle-based dynamic stabilization:a study using finite element analysis[J].Spine J,2013,13(1):85-94.
Prospective design and stability evaluation of a new dynamic stabilization system for lumbar spine
Zheng Xiaoyong1,Zhao Dongsheng1,Ma Yuanzheng1,et al.1Department of Orthopaedics,the PLA 309 Hospital, Beijing,100091;2Department ofOrthopaedics,the FirstAffiliated Hospitalof PLAGeneral Hospital,Beijing,100048, China
Objective To design and determine the magnitude of stabilization and the effect on the adjacent segment of a newdynamic stabilizationsystem.Methods 1.Sixlumbarcadaver spineswere testedforROMof eachsegment.2.New dynamic system consists of titanium-alloy rods,cables and springs.The system was designed for 10°motion in flextionextension andlateral bending,5°forrotation.3.Six lumbar cadaver spines wereusedfortesting.Acontrolleddefect was created in the L3/4segment.The ROM for the bridged and the adjacent segments were determined.The end plate stress of both stabilization methods on the superior adjacent segments were measured at the same time.Results Both the dynamic system and rigid fixator reduced the ROM and NZ below the magnitude of the intact spine for lateral bending,flexion and extension.In axial rotation the ROM for the dynamic system was in the range of the intact spine,while the rigid fixator showeda decreasedROM.Foradjacentsegments,no significant differencesofROMwerefoundamong intact,dynamic andrigidfixationsystems.ConclusionIn thelumbarcadaverspines afterdefectwascreatedintheL3/4segment,restoration of stability with the new dynamic system is possible in flexion,extension,right and left lateral bending,and in axial rotation.The ROM and NZ of the adjacent segments were not affected by the instrumentation of the bridged segment.
Dynamic fixation;Non-fusion technique;Lumbar spine;Biomechanics
R318.01
A
10.3969/j.issn.1672-5972.2015.04.024
swgk2015-02-00035
郑晓勇(1978-)男,博士,主治医师。研究方向:创伤骨科、脊柱外科。
2015-02-27)
1解放军第309医院骨科,北京100091;2解放军总医院第一附属医院骨科,北京100048
猜你喜欢
中国港湾建设(2022年12期)2022-12-28 05:27:24
电站辅机(2021年4期)2021-03-29 01:16:58
中国骨与关节杂志(2019年6期)2019-01-03 12:29:59
中国中西医结合影像学杂志(2018年6期)2018-12-17 09:24:02
家庭影院技术(2018年1期)2018-04-28 09:07:11
小学生作文(中高年级适用)(2017年6期)2017-07-07 14:57:15
川北医学院学报(2015年5期)2015-12-05 08:22:31
精准医学杂志(2015年5期)2015-05-01 02:33:12
小天使·六年级语数英综合(2014年9期)2014-09-11 23:56:36
筑路机械与施工机械化(2014年3期)2014-03-01 02:58:23