安防监控机器人的移动定位技术研究
2015-05-30 19:31:59苏春芳杨立志
江苏理工学院学报 2015年4期
苏春芳 杨立志
摘 要:针对小区安防监控机器人移动定位的准确性、实时性,提出基于光电传感器和电子罗盘的多信息融合的移动定位算法。该算法将机器人单位时间内位移和方位角的变化量作为输入条件,基于矢量方程构建机器人的位移变换范围,然后通过消除累积误差,确定机器人的准确位置。实验结果表明,该方案有效的解决了小区安防监控机器人的定位问题,而且在路面相对平整的生活小区中表现出较好的定位准确性和实时性。
关键词:多信息融合;光电传感器;电子罗盘
中图分类号:TP249文献标识码:A文章编号:2095-7394(2015)04-0022-04
0 引言
随着物联网技术的成熟,出现了安防监控机器人,移动定位技术则是这一领域的关键技术,其中基于无线传感器的移动定位技术成为目前热点研究领域。在移动网络定位中,常见的方法是反复定位,包括基于距离的(range-based)定位,距离无关的(range-free)定位,传感器网络的移动定位算法。相比之下,基于测距的定位能够实现高精度的定位,而距离无关的定位成本低,但定位精度低,且存在无法定位的盲点,很大程度上依赖锚节点的配置状况。[1]由于小区安防监控机器人工作的环境是居民生活的小区,小区内的道路相当平整,可视为基本水平;机器人整个的移动轨迹具有可见、可预知性,工作环境相对有限,所以对定位的精确性要求相对高些,本文选取基于距离的定位技术。
蒙特卡罗(Monte Carlo)用于移动节点定位,每个锚节点在两跳邻居范围内周期性广播自身位置,根据节点收到锚节点坐标,从而确定自身所处的范围[2],为了避免算法存在较大的通信开销,在安防监控机器人定位中设置尽量少的锚点,为了不失定位的准确性,充分考虑到移动节点运动过程中前后位置相关性,利用光电传感器和运动轮的周长,精准的计算采样时间片内位置的变化。
1 移动定位模型
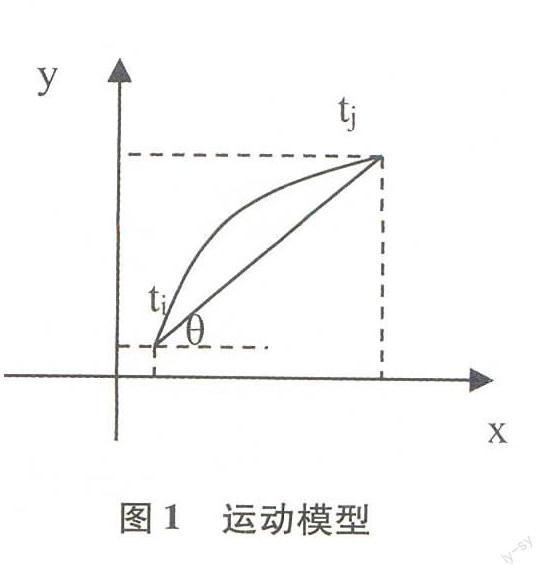
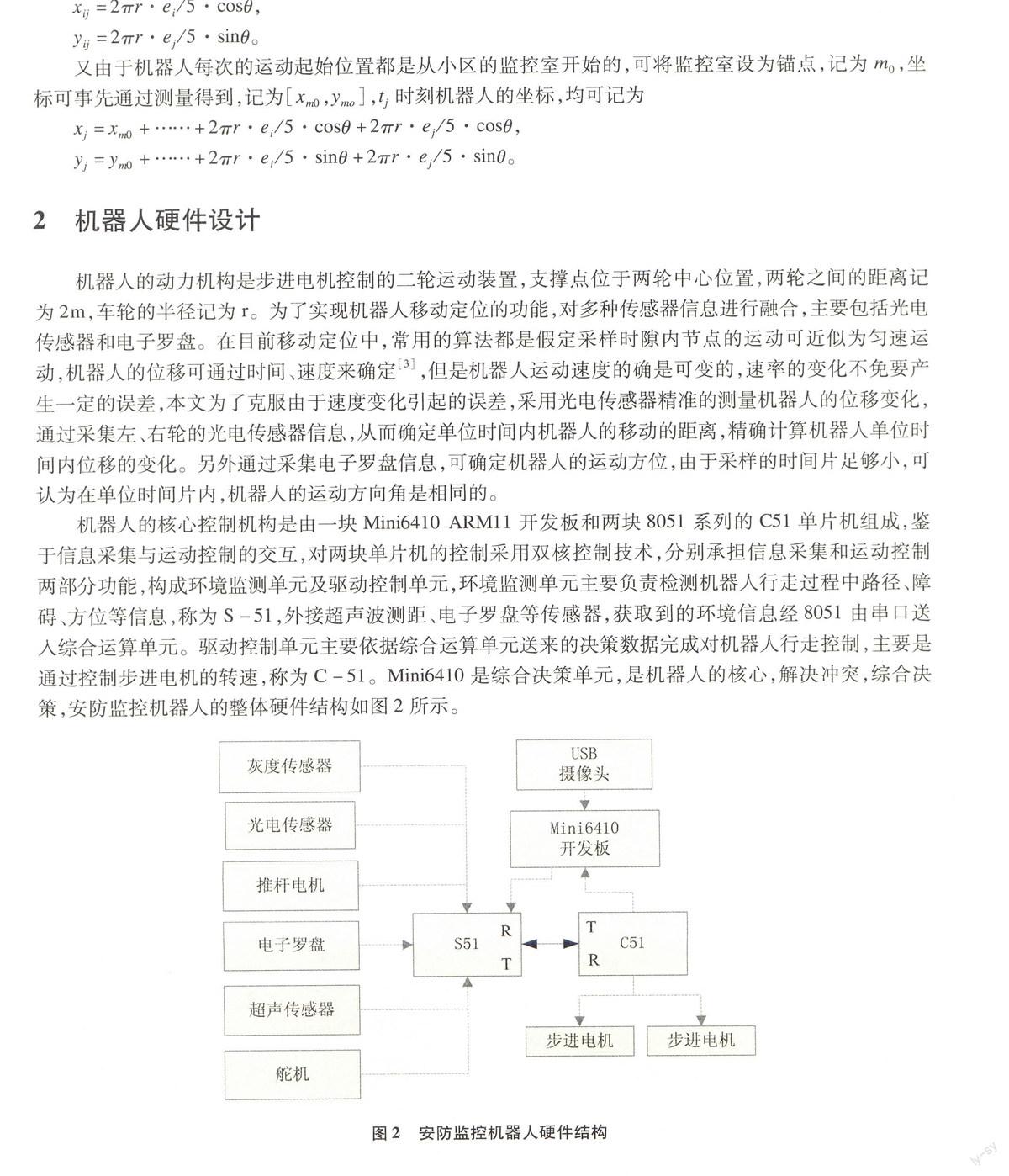
图1 运动模型 假设采样时间记为t,ti与tj间隔记为△dt,当△dt足够小,ti与tj时间间隔内,机器人的位置变化认为是可微的,记为△ds。△ds=2πr·ej,其中r是动力轮的半径,ej是ti与tj时间间隔内光电传感器的信息量。采用两路光电传感器,分别测量左、右轮的转速,记为elj、erj,当elj=erj,监控机器人进行的直线运动;当elj>erj,监控机器人右转弯;反之当elj 模型如图1所示,从运动模型可以看出,通过矢量计算不难得到ti、tj位移的差xij、yij。 xij=2πr·ei/5·cosθ, yij=2πr·ej/5·sinθ。 又由于机器人每次的运动起始位置都是从小区的监控室开始的,可将监控室设为锚点,记为m0,坐标可事先通过测量得到,记为[xm0,ymo],tj时刻机器人的坐标,均可记为 xj=xm0+……+2πr·ei/5·cosθ+2πr·ej/5·cosθ, yj=ym0+……+2πr·ei/5·sinθ+2πr·ej/5·sinθ。 2 机器人硬件设计 机器人的动力机构是步进电机控制的二轮运动装置,支撑点位于两轮中心位置,两轮之间的距离记为2m,车轮的半径记为r。为了实现机器人移动定位的功能,对多种传感器信息进行融合,主要包括光电传感器和电子罗盘。在目前移動定位中,常用的算法都是假定采样时隙内节点的运动可近似为匀速运动,机器人的位移可通过时间、速度来确定[3],但是机器人运动速度的确是可变的,速率的变化不免要产生一定的误差,本文为了克服由于速度变化引起的误差,采用光电传感器精准的测量机器人的位移变化,通过采集左、右轮的光电传感器信息,从而确定单位时间内机器人的移动的距离,精确计算机器人单位时间内位移的变化。另外通过采集电子罗盘信息,可确定机器人的运动方位,由于采样的时间片足够小,可认为在单位时间片内,机器人的运动方向角是相同的。 江苏理工学院学报第21卷 第4期 苏春芳 杨立志:安防监控机器人的移动定位技术研究 机器人的核心控制机构是由一块Mini6410 ARM11开发板和两块8051系列的C51单片机组成,鉴于信息采集与运动控制的交互,对两块单片机的控制采用双核控制技术,分别承担信息采集和运动控制两部分功能,构成环境监测单元及驱动控制单元,环境监测单元主要负责检测机器人行走过程中路径、障碍、方位等信息,称为S-51,外接超声波测距、电子罗盘等传感器,获取到的环境信息经8051由串口送入综合运算单元。驱动控制单元主要依据综合运算单元送来的决策数据完成对机器人行走控制,主要是通过控制步进电机的转速,称为C-51。Mini6410是综合决策单元,是机器人的核心,解决冲突,综合决策,安防监控机器人的整体硬件结构如图2所示。 图2 安防监控机器人硬件结构 3 移动定位算法 安防监控机器人的实时定位依赖于电子罗盘和光电传感器采集的信息量。控制机构中的一个Ceil51单片机,命名为S51,负责采集电子罗盘和光电传感器的信息。电子罗盘能够精确的采集机器人的运动方位,在采样时间间隔内,由于采样时间间隔足够小,机器人的运动方位可视为固定不变,S51单片机采集的信号量可作为采样时间间隔内机器人运动方向角,由于电子罗盘采集信息的单位是0.1度,所以采集的数值属于[0,3 600]4区间,信息采集完成后,将信息送到串口的R端。另外,光电传感器主要用来采集△dt时间间隔内,光电触发的次数,由于运动轮由5个扇页组成,当运动轮在转动过程中,扇页转过,就触发光电传感器,当运动轮运动一周,触发5次光电信号。
在本系统中,传感器的信息采集与上层控制机构的交互采用异步回调机制,当串口的R端有数据到达,触发上层的回调函数callback function的执行,在该函数中完成对电子罗盘信息的读取。S-51向上层发送的信息是16个字节的字符串,形式如A:da L:dl R:dl E,其中da∈(0,3600),表示电子罗盘的方位角;
4 实验结果及结论
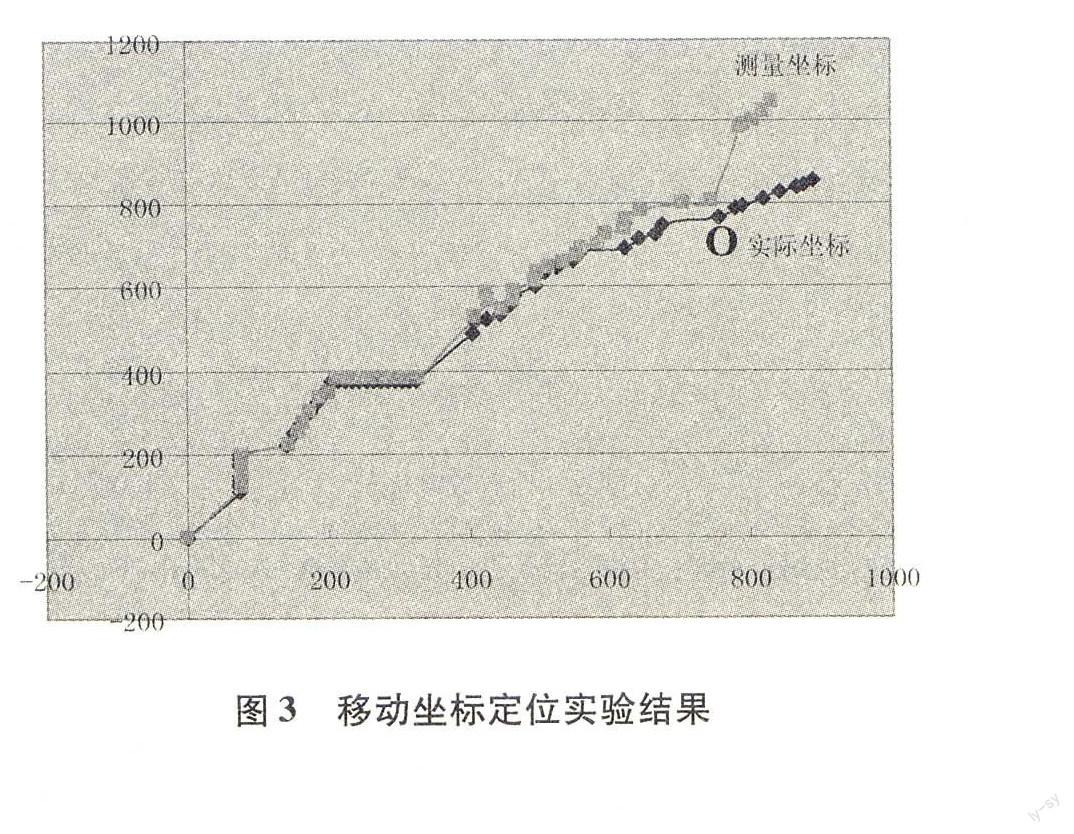
将上述移动定位算法应用到小区安防监控机器人中,经过实验验证,上述算法能够有效的解决移动定位机器人的移动定位问题,避免了蒙特卡罗(Monte Carlo)算法较大的通信开销,另外,由于采用光电传感器测量位移,定位的精准性也得到了大大的提高。以40ms为采样时间片,应用上述算法得到20 000组坐标数据,与实际坐标进行对比,如图3所示,从图中不难看出点O(784,800)是一个转折点,在O点之前测量坐标与实际坐标基本吻合,误差控制在55之内,从O点后,误差大增,但是控制在200之内,对于一个占地10万m2的中等住宅小区,这些误差基本可以忽略不计的,经过验证,上述算法是可行的。从整体上看,误差是一个逐渐增大的趋势,对上述现象进行分析,找出产生上述现象的原因是由于累积误差造成的,在移动定位算法中,由于当前的坐标总是依赖于前一点的前标,为此,将算法进行了改正,增加了锚点的个数,在小区道路的转变处,增加相应的锚点,使用锚点坐标对计算得到的坐标进行校正[5],经过实验,取得了良好的移动定位的效果。
图3 移动坐标定位实验结果
参考文献:
[1]都海华,唐宏,邝杨.无线传感器网络移动定位算法研究[J].黑龙江科技信息,2009(8):51.
[2]彭鑫.基于梯度搜索的移动协作定位算法[J].计算机学报,2014(2):482-483.
[3]蔡泽辉.稀疏锚节点下室内人员定位跟踪算法研究[D].北京:中国矿业大学,2014.
[4]李书华.HMR3000电子罗盘在车载设备上的使用[J].光电技术应用,2010.3:14-15.
[5]陳伟韬.基于MEMS传感器的电子罗盘系统的设计[D].广州:广州工业大学,2013.
A Research of the Technology of Position Monitoring in Community Security Monitoring Robot
SU Chun-fang,YANG li-zhi
(Jiangyin Polytechnic College,Wuxi 214405,China)
Abstract:Because the position monitoring of the mobile robot requires accurate and real-time,the article put forward the mobile positioning algorithm of multiple information fusion.The distance of the mobile robot in the fixed time interval and the direction of the robot are the input condition of the algorithm.Based on vector equation,we can get the change in the x and y,this position of the robot always has certain deviation,we set some?anchor point in the corner,decreasing the deviation of the position.the algorithm is effective to get the position of the security monitoring?robot In living community where the road surface of living community is relatively smooth,the technology of position monitoring showed better accuracy and real-time performance.
Key words:multiple information fusion;photoelectric sensor;electronic compass
责任编辑 祁秀春