
多目视觉在壳体空间异面直线检测中的应用
2015-05-30 10:48:04叶剑波王子龙
中国包装工业(下半月) 2015年8期
叶剑波 王子龙

【摘 要】壳体型腔构成空间异面直线,需要对异面直线中心距进行测量。设计采用多目视觉对端面中心进行检测,继而重构空间异面直线坐标,数学计算中心距。
【关键词】多目视觉 异面直线 中心距
引言
视觉测量通常采用单目或双目视觉,用于确定目标的精确尺寸或位置,对于复杂零件或视场有遮挡的领域,采用单目或双目视觉应用将受到限制,比如说,要测定互相垂直的异面直线之间的距离,靠1台相机或2台相机将无法实现测量。
汽车转向器壳体内部安装涡轮蜗杆,由电机驱动实现助力转向。在涡轮蜗杆组件安装之前,需要测定型腔内部的精确尺寸,以便选用合适中心距的组件。另外考虑零件本身的加工误差以及夹具卡具的安装误差,被测量的端面将存在高度差,多种误差的组合,需要考虑多组双目相机的组合测试方式,即多目视觉测量方式。
异面直线是典型的空间三维重建应用,采用单端面双目视觉方式重建直线的端点,两个端点确定一条直线,四个端点即可实现空间异面直线的重建。
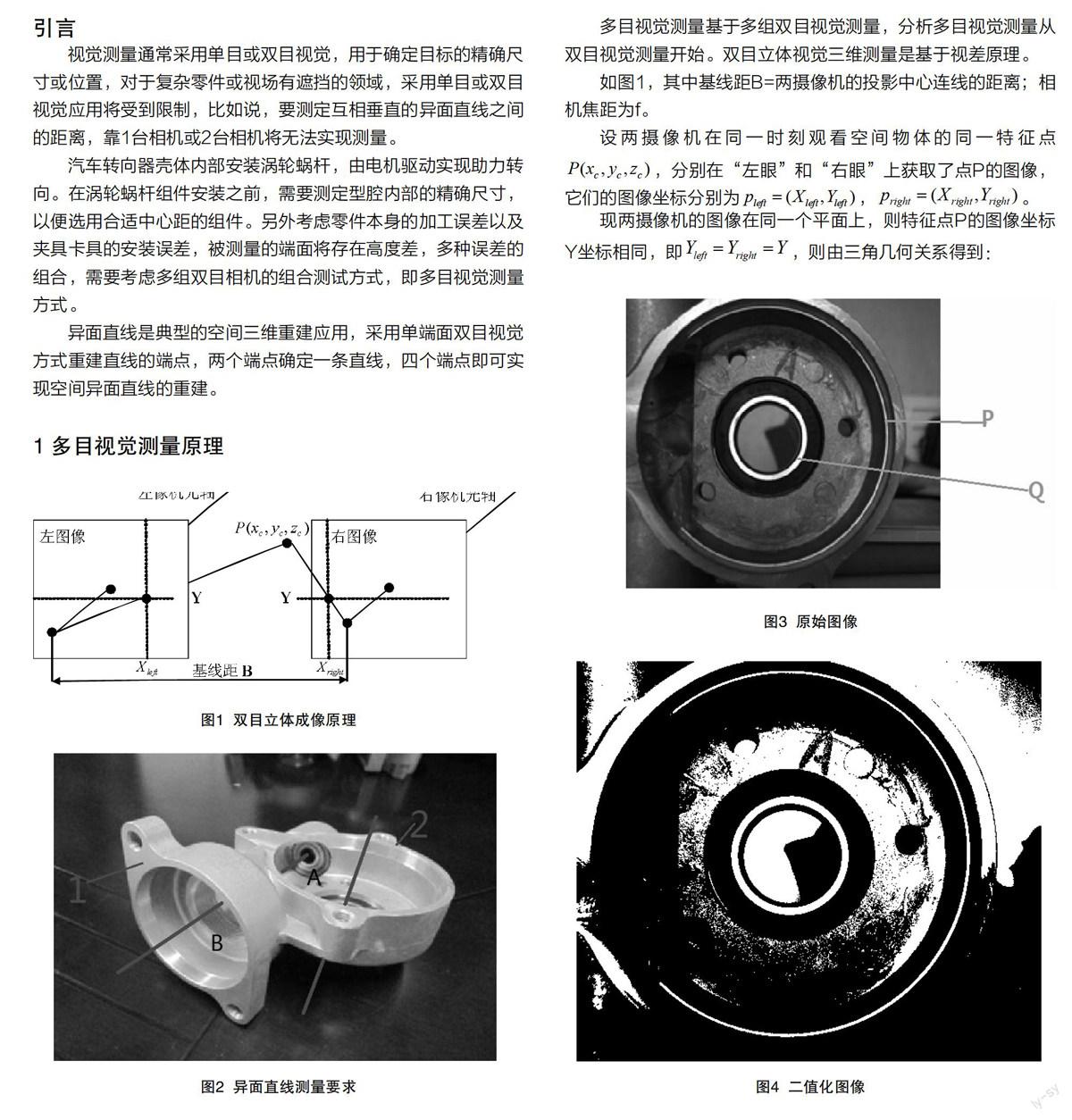
1 多目视觉测量原理
多目视觉测量基于多组双目视觉测量,分析多目视觉测量从双目视觉测量开始。双目立体视觉三维测量是基于视差原理。
如图1,其中基线距B=两摄像机的投影中心连线的距离;相机焦距为f。
设两摄像机在同一时刻观看空间物体的同一特征点,分别在“左眼”和“右眼”上获取了点P的图像,它们的图像坐标分别为,。
现两摄像机的图像在同一个平面上,则特征点P的图像坐标Y坐标相同,即,则由三角几何关系得到:
(1)
则视差为:。由此可计算出特征点P在相机坐标系下的三维坐标为:
(2)
因此,左相机像面上的任意一点只要能在右相机像面上找到对应的匹配点,就可以确定出该点的三维坐标。这种方法是完全的点对点运算,像面上所有点只要存在相应的匹配点,就可以参与上述运算,从而获取其对应的三维坐标。
壳体型腔测量就是要求测量如图2中两条红色的直线代表“1”侧与“2”侧确定的两条轴线中心距。端面是带有加工误差的加工圆。轴承的内圆的圆心与定位面的圆的圆心来得到两条轴线,计算出两条异面轴线之间的距离就是所要检测工件的中心距。
在测量过程中我们在“1”侧放2台CCD相机,通过这两台相机可以得到“1”侧的轴线上轴承的中心点A的三维坐标和定位面中心点B的三维点坐标,通过A、B两点可以唯一确定出“1”侧的轴线方程,同理,在“2”侧放2台相机,通过相同的方法可以得到“2”侧的轴线方程,最后通过对“1”、“2”侧的四个相机做整体标定将两侧的轴线转换到一个坐标系下,这样问题就等价于在空间直角坐标系下求已知两条异面直线的距离。
2 异面直线视觉测量
下面是下壳体“2”侧的图像分析实验。最终要得到的是圆P与圆Q的圆心坐标(对圆P进行拟合可以得到一个圆P的圆心),如图3、图4、图5所示。
上述实验中可以提取到两个圆的圆心坐标,从而可以利用双目视觉重建出圆心坐标的三维点。
试验过程如下:
(1)首先对四个相机进行标定,通过标定可以将四个相機坐标系转换到同一个坐标系下。用预先准备好的已知尺寸大小的标定板对四个basler相机进行标定,得到四个相机之间的相互位置关系(图6)。
(2)四个相机在不同角度对下壳体进行拍照,通过图像处理的方法提取轴承的中心与定位面圆的中心,用1中标定出来的结果对两个中心进行三维重建,计算两条轴线的方程(图7)。
(3)计算轴线距离(图8)。
、是两条异面轴线,、是两条轴线上的两点,的长度就是所求的两条轴线之间的距离,计算公式如下:
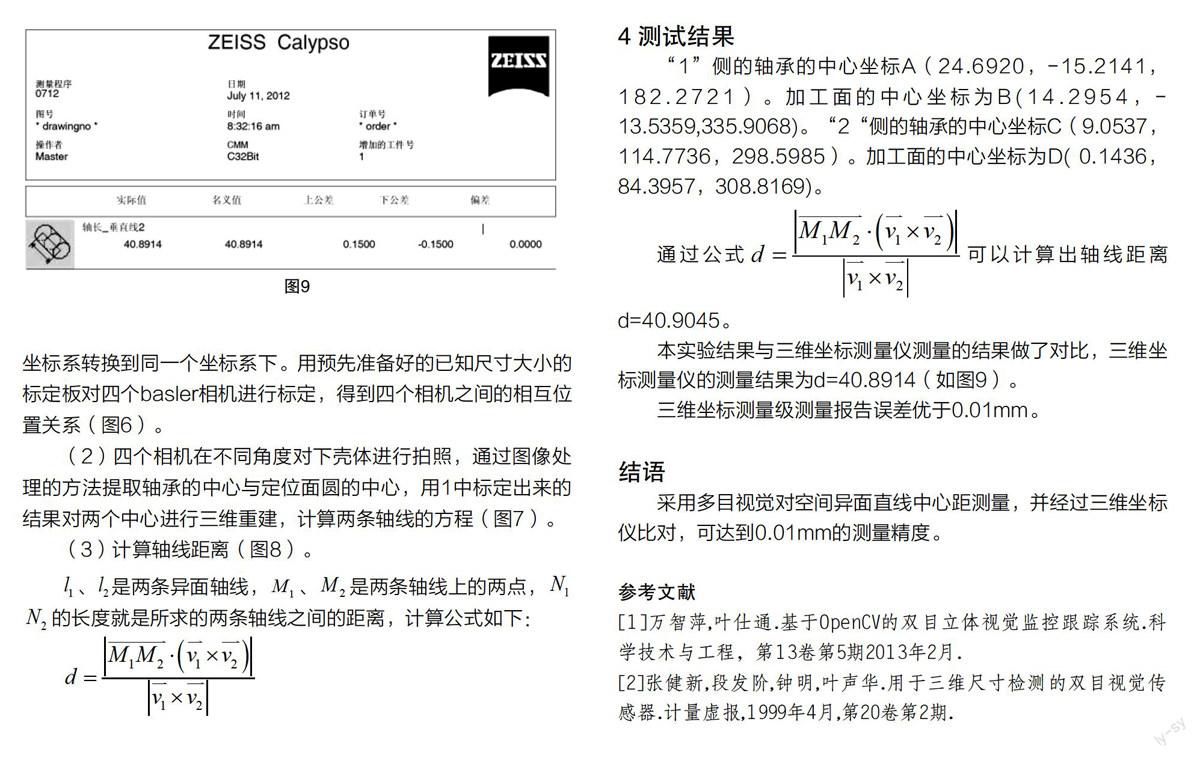
4 测试结果
“1”侧的轴承的中心坐标A(24.6920,-15.2141,182.2721)。加工面的中心坐标为B(14.2954,-13.5359,335.9068)。“2“侧的轴承的中心坐标C(9.0537,114.7736,298.5985)。加工面的中心坐标为D( 0.1436, 84.3957,308.8169)。
通过公式可以计算出轴线距离d=40.9045。
本实验结果与三维坐标测量仪测量的结果做了对比,三维坐标测量仪的测量结果为d=40.8914(如图9)。
三维坐标测量级测量报告误差优于0.01mm。
结语
采用多目视觉对空间异面直线中心距测量,并经过三维坐标仪比对,可达到0.01mm的测量精度。
参考文献
[1]万智萍,叶仕通.基于OpenCV的双目立体视觉监控跟踪系统.科学技术与工程,第13卷第5期2013年2月.
[2]张健新,段发阶,钟明,叶声华.用于三维尺寸检测的双目视觉传感器.计量虚报,1999年4月,第20卷第2期.
