水下自主航行器舵翼水动力性能分析
2015-05-26 06:31:48吕欣倍张铁栋庞永杰
扬州大学学报(自然科学版) 2015年3期
吕欣倍,张铁栋,王 聪,庞永杰
(哈尔滨工程大学船舶工程学院,哈尔滨 150001)
水下自主航行器舵翼水动力性能分析
吕欣倍,张铁栋*,王 聪,庞永杰
(哈尔滨工程大学船舶工程学院,哈尔滨 150001)
针对300 kg级水下自主航行器尾舵设计的关键问题,采用三维计算流体力学方法,计算了梯形舵在不同航速下的流体力学性能,得到不同舵角条件下水下航行器舵翼的水动力性能与流场分布,分析了不同舵角水动力性能变化原因和声呐对垂直上舵产生的影响,同时对舵翼进行了优化设计.结果表明,当水下航行器正常航行时,舵翼攻角大于20°后,舵翼水动力性能明显下降.优化发现后掠7.71°的舵翼在理论上具有更好的水动力性能,为水下航行器的后续设计提供参考.
水下自主航行器;舵翼;水动力学;流场分布;数值模拟
随着海洋资源开发,水下自主航行器受到越来越广泛的关注[1].水下自主航行器利用舵翼产生的升力可改变运动状态,有效规避航行过程中的障碍物,因此分析水下自主航行器舵翼的水动力性能,对水下自主航行器控制方法的实现与完善具有一定的实用意义.目前国内外已经开展了相关的研究工作,Phillips等[2]运用Fluent软件对AUV(autonomous underwater vehicles)进行优化设计,提高了AUV的水动力性能;高婷[3]运用iSIGHT软件,在NACA舵型基础上进行优化,使新翼型升阻比提高到了3.11;王妹婷等[4]通过Fluent软件对水下自主航行器舵翼的三维实体模型进行了数值模拟,得到不同攻角与雷诺数下舵翼的水动力性能;沈海龙等[5]使用CFD(computational fluid dynamics)前处理软件ICEM CFD划分流场网格,研究了船体、螺旋桨、完整船桨组合这3种模型的水动力性能.本文在相应的CFD理论下,使用Flunet软件,采用二阶迎风格式,结合水下自主航行器艇体,对三维舵翼在不同攻角条件下的水动力性能进行了详细计算与分析,为相关的设计提供参照.
1 水下自主航行器与舵翼计算模型
1.1 几何参数
水下自主航行器艇体采用Nystrom流线型回转体形式,分3个舱段:艏部舱段、艉部舱段和中间舱段.艏部舱段是一个半椭圆进流段,艉部舱段去流段借鉴了Hugin系列潜水器的尾部型线,中间舱段为圆柱形,舱体底部为平底结构,艇体总长4.5 m,直径0.53 m,其中首段长0.8 m,尾段长0.9 m,中间舱段长2.8 m(如图1所示).本潜器巡航速度3节,最大速度5节.舵翼采用NACA0015翼型[6-8],为梯形舵翼,主要参数为:翼展长265.6 mm,根弦长231 mm,端弦长90.8 mm,平均弦长164.8 mm,厚度比0.149,锥度比0.393,表面积43 347 mm2,展弦比1.612,导边迎角101°,舵杆至导边距离62.6 mm.
1.2 网格划分
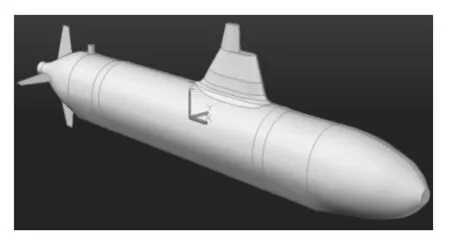
图1 艇体三维模型Fig.1 3D model of AUV
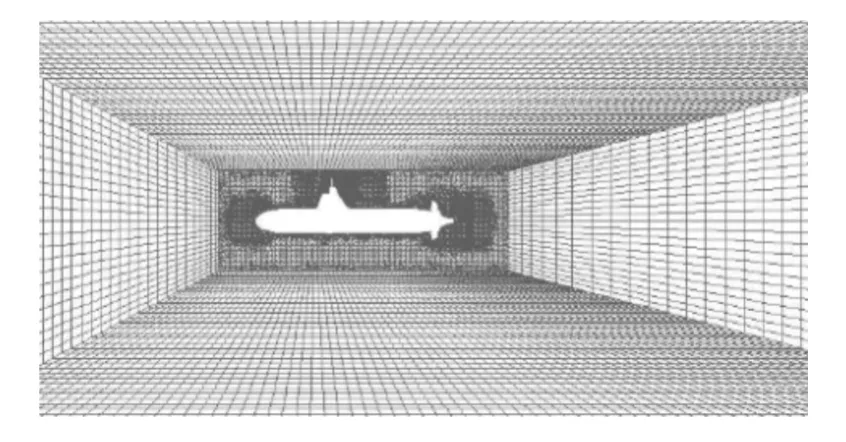
图2 混合网格Fig.2 Mixture mesh
计算域外部整体为圆柱体域,其中计算域首端距艇首长度为1.8个艇长,尾端距潜器尾部为4个艇长,横剖面顶端距艇体为1个艇长长度,计算域划分如图2所示.为有效降低网格数量,采用混合网格对整体计算域进行划分[9].把计算域分成网格较密的艇体及舵翼的内流场和网格较稀疏的外流场.考虑到艇体的首尾部、舵翼端部和舵梢等位置变化曲率较大,因此内流场采用非结构化网格,控制网格的大小和节点的密度,以保证生成高质量网格.外流场由于空间较大,采用结构化六面体网格和棱柱体网格,这种网格搭配模式既可以减少网格数量,也能提高网格的质量.本文使用RNG(renormalization-group)k-ε模型[10],边界条件设置为:入口处为速度入口,出口处为压力出口,其余设置为壁面条件.
2 数值计算
2.1 水平舵水动力性能
图3为水平舵水动力性能计算结果.由图可见,舵翼舵角α约为6°时升阻比达最大,随着舵角增加,升阻比下降.在小舵角时该舵具有较高的舵效,有利于水下自主航行器的操纵.
图4为不同舵角下流场矢量图.结果显示当舵角α<15°时,舵根附近漩涡区域较小;随α增加,舵根区流体速度逐渐降低,涡流区域逐渐扩大;当α=20°时,涡流区域扩大到舵长的1/3左右;当α=25°时,涡流区域覆盖了舵后大半区域;当α=30°时,舵后区域几乎已经被涡流区域完全覆盖.升力、阻力曲线显示,当15°<α<20°时,舵的升力变化趋缓,当α>20°后升力开始下降.这是由于当α=15°时开始出现涡流区域,且此区域随着舵角的增加而逐渐扩大所致,产生涡流后流体速度降低,升力下降.

图3 水平舵水动力性能Fig.3 Hydrodynamic performance of diving rudder
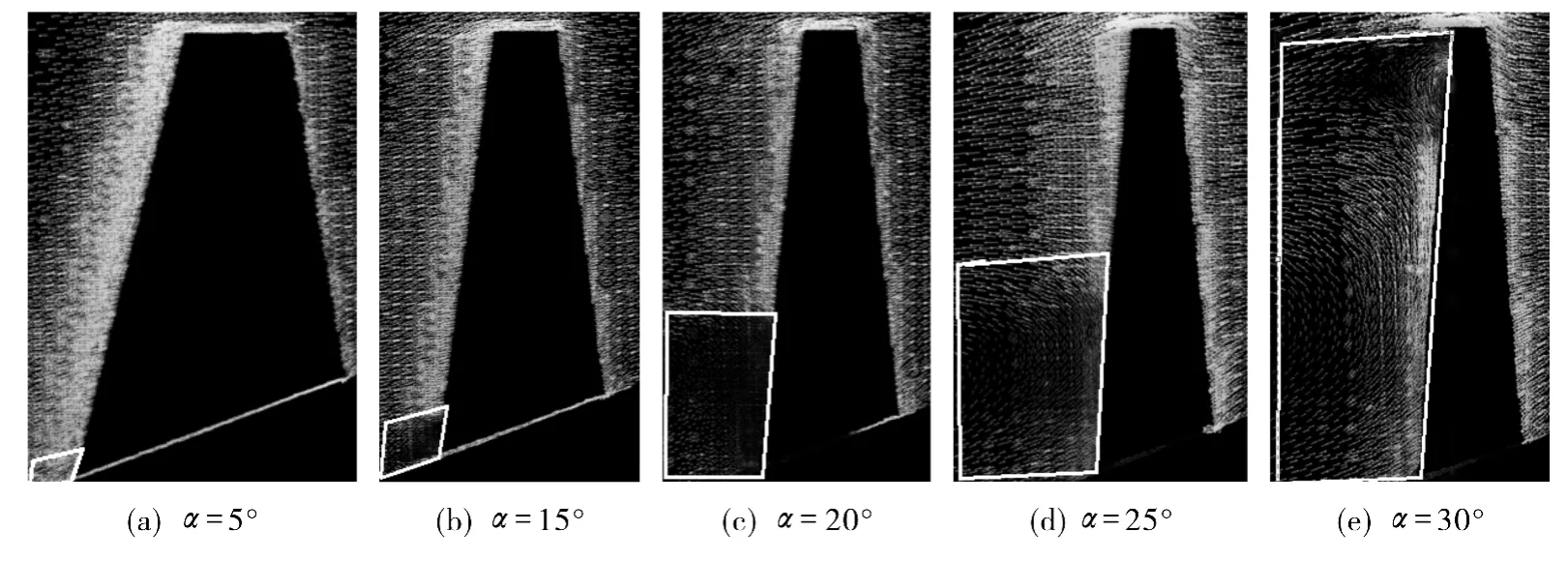
图4 流场矢量图Fig.4 The vector diagram of flow field
2.2 垂直舵水动力性能
垂直舵有上、下垂直舵,虽是同轴转动,但由于声纳和艇体中部平底引起艇体上下流场不对称,使得上下垂直舵产生的舵力有差异.图5为声呐与垂直上舵区域流场分布,声纳的存在改变了垂直上舵入口处的流场,从而影响垂直上舵的水动力性能.图6为不同航速下垂直舵受力曲线,可见垂直上舵升力明显比垂直下舵升力低,因为来流速度较低时,舵翼产生的升力也较小.声呐的存在引起声呐后方流体区域流速减慢,导致垂直上舵水动力性能明显降低.
由于上下垂直舵在相同舵角、相同航速下产生的升力不同,从而对水下自主航行器产生旋转力矩,使水下航行器发生横倾.图7为不同航速下旋转力矩曲线,可见当垂直舵舵角为20°时,横倾力矩最大.3节巡航速度时最大横倾力矩为2.64 N·m;4节航速时最大横倾力矩为4.9 N·m;5节航速时最大横倾力矩为7.92 N·m.此力矩导致艇体在航行过程中易产生旋转,可采用缩小垂直下舵表面积的方法降低垂直下舵横向受力,缩小横倾力矩,使艇体运动较为平稳.
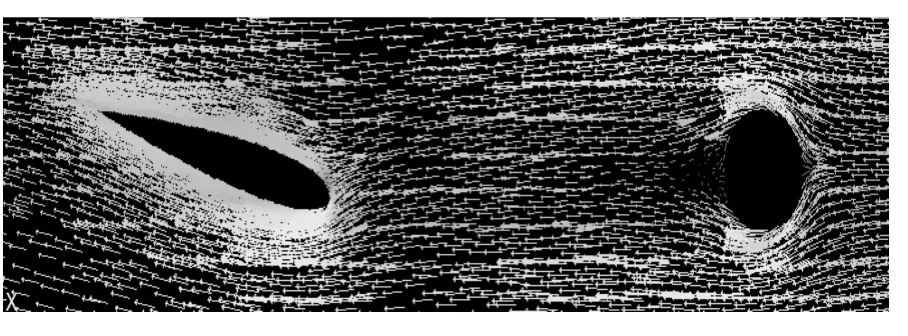
图5 圆柱形声呐对垂直上舵的影响Fig.5 Influence of sonar on the top rudder
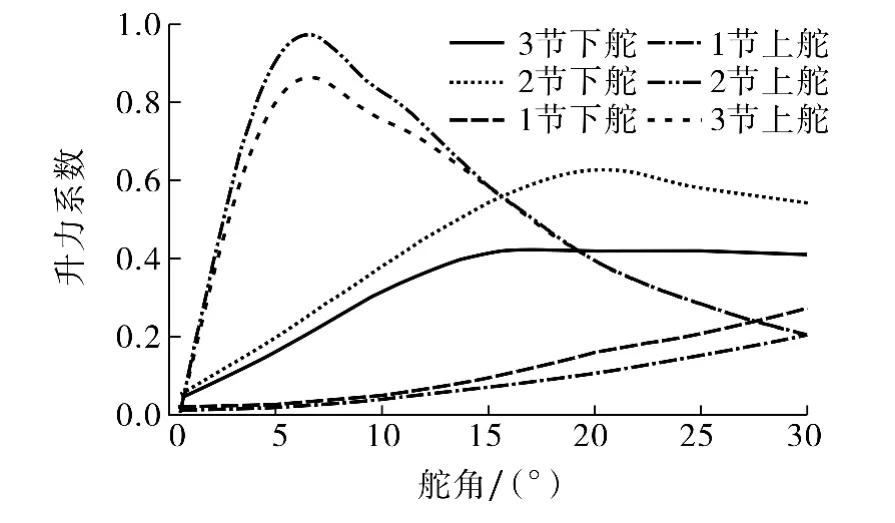
图6 不同航速垂直舵受力情况Fig.6 Force of the vertical rudder at different speed
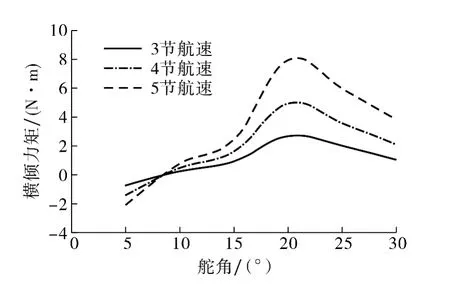
图7 不同航速与舵角对艇体横倾力矩的影响Fig.7 The influence of different speed and rudder angle on heeling moment of AUV
3 舵型优化
由于需要保持水下自主航行器的操纵性能,舵翼面积不能改变.为提高舵效,本文探究了不同掠角对舵翼舵效的影响.将舵翼的掠角分别改为后掠7.71°,前掠5.9°和前掠12.5°,把舵翼远离艇体的一端进行放大或缩小,模拟了不同舵角时4种舵型的升力、阻力和升阻比.
图8为3节航速时不同舵型受力与升阻比.结果显示,不同舵翼的阻力性能基本相同,但在20°舵角时后掠角为7.71°的舵翼阻力和升力较大,升阻比优于其他舵翼,与原型舵相比,升阻比从3.53提升到3.85,提高了8.3%,故后掠7.71°的舵翼,其性能比原型舵在大舵角时有明显的优势.而前掠角翼型的舵,综合性能不如原型舵.在实际设计中,建议采用后掠角为7.71°舵翼.
4 结论
本文采用计算流体动力学软件Fluent对300 kg级水下自主航行器及其舵翼的三维模型进行了数值模拟仿真,计算了水下自主航行器舵翼在不同舵角、航速下的水动力性能,得到了相应的升力、升阻比、横倾力矩和流场分布等.结果表明:水下自主航行器正常航行时,舵翼舵角超过20°后,阻力随舵角增加而增加,升力变化不明显,升阻比下降,舵翼尾端会出现漩涡而影响舵翼水动力性能;垂直舵由于声呐影响,造成垂直上、下舵受力不对称,3节航速时可形成2.64 N·m的力矩;优化设计得到后掠7.71°角的舵翼在理论上有更好的水动力性能,可对后续设计提供参考.
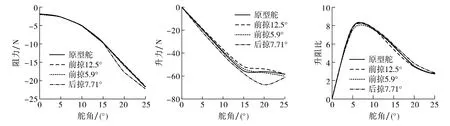
图8 3节航速下不同舵的水动力性能Fig.8 Hydrodynamic performance of different rudders at speed 3 kn
[1]ZHU Daqi,ZHAO Yue,YAN Mingzhou.A bio-inspired neurodynamics based backstepping path-following control of an AUV with ocean current[J].Int J Robotics Autom,2012,27(3):298-307.
[2]PHILLIPS A B,TURNOCK S R,FURLONG M.The use of computational fluid dynamics to aid cost-effective hydrodynamic design of autonomous underwater vehicles[J].Proc I Mech E,Part M:J Eng Marit Environ,2010,224(4):239-254.
[3]高婷.潜水器螺旋桨和舵翼的优化设计 [D].哈尔滨:哈尔滨工程大学,2013.
[4]王妹婷,齐永锋,汤方平,等.水下机器人舵翼的水动力仿真 [J].扬州大学学报(自然科学版),2013,16(3):47-51.
[5]沈海龙,苏玉民.基于滑移网格技术的船桨相互干扰研究 [J].哈尔滨工程大学学报,2010,31(1):1-7.
[6]戴志光.小型水下机器人本体结构设计及水动力仿真 [D].扬州:扬州大学,2012.
[7]PALMER A R.Analysis of the propulsion and manoeuvring characteristics of survey-style AUVs and the development of a multi-purpose AUV [D].Southampton:Univ Southampton,2009.
[8]DANTAS J L D,BARROS E A.Numerical analysis of control surface effects on AUV manoeuvrability[J].Appl Ocean Res,2013,42:168-181.
[9]赵金鑫.某潜器水动力性能计算及运动仿真 [D].哈尔滨:哈尔滨工程大学,2011.
[10]SAKTHIVEL R,VENGADESAN S,BHATTACHARYYA S K.Application of non-linerak-εturbulence model in flow simulation over underwater axisymmetric hull at higher angle of attack[J].J Nav Archit Mar Eng,2011,8(2):149-163.
Hydrodynamic performance prediction on the rudder wing of autonomous underwater vehicle
LYU Xinbei,ZHANG Tiedong*,WANG Cong,PANG Yongjie
(Sch of Ship Engin,Haerbin Engin Univ,Haerbin 150001,China)
Aiming at the crucial issues in the design of a stern rudder for autonomous underwater vehicle,the hydrodynamic performance and the distribution of flow field with different rudder angles and different speed of the 300 kg autonomous underwater vehicle are investigated using 3D computational fluid dynamics method.The reason of the hydrodynamic performance changing and the influence on top rudder by the sona have been analyzed.Optimal design for the rudder wing has also been made.The results show that the hydrodynamic performance of the rudder wing will decline obviously when the angle of the rudder wing is more than 20 degrees.The new rudder wing with 7.71 degrees has better hydrodynamic performance than the formal one.The results have certain reference value for the follow-up design.
autonomous underwater vehicle;rudder wing;hydrodynamic;distribution of flow field;numerical simulation
TP 242.3
A
1007-824X(2015)03-0056-04
2015-01-22.* 联系人,E-mail:zhangtiedong@hrbeu.edu.cn.
国家高技术研究发展计划(863计划)资助项目(2011AA09A106);中国博士后科学基金资助项目(2012M510928).
吕欣倍,张铁栋,王聪,等.水下自主航行器舵翼水动力性能分析[J].扬州大学学报(自然科学版),2015,18(3):56-59.
(责任编辑 秋 实)
猜你喜欢
船舶与海洋工程(2022年6期)2023-01-12 07:54:02
舰船科学技术(2022年22期)2022-12-13 03:37:24
舰船科学技术(2022年10期)2022-06-17 06:25:14
水上消防(2022年1期)2022-06-16 08:06:56
中国舰船研究(2022年2期)2022-04-26 07:51:20
江苏船舶(2021年4期)2021-09-28 08:09:10
舰船科学技术(2021年8期)2021-09-18 08:36:06
舰船电子工程(2020年4期)2020-06-19 06:14:48
舰船科学技术(2018年7期)2018-07-25 06:30:18
中国舰船研究(2016年6期)2016-12-12 02:35:26