
一种基于局部表示的精确跟踪算法
2015-05-11 05:37李临生闫庆森李慧霞刘瑞珍
太原科技大学学报 2015年6期
芦 丹,李临生,闫庆森,李慧霞,刘瑞珍
(1.太原科技大学电子信息工程学院,太原 030024;2.西北工业大学计算机学院,西安 710000)
一种基于局部表示的精确跟踪算法
芦 丹1,李临生1,闫庆森2,李慧霞1,刘瑞珍1
(1.太原科技大学电子信息工程学院,太原 030024;2.西北工业大学计算机学院,西安 710000)
基于局部表示的精确跟踪算法,将局部信息引入目标跟踪算法中,有效地改善了遮挡的问题。对每一部分的局部信息进行分类,同时构建局部分类器,使分类器的学习更加精确。本算法有效地改进了快速压缩跟踪算法中出现的部分遮挡等问题,使跟踪算法更加精确。
压缩传感;局部信息表示;目标追踪
目标跟踪[1-4]就是把视频中每一帧图像中感兴趣的目标位置标记串联出来,是机器视觉的一个重要应用方向[5],是一项融合了图像处理、模式识别[6]、人工智能[7]、自动控制以及计算机等众多领域中的先进思想的技术。目前对于物体的跟踪应用最广的可以说是视频监控系统和军事领域,其次的是人机交互界面、娱乐动画和多媒体及通讯等领域。但是一些客观因素如复杂背景、时变背景、部分及全局遮挡会对跟踪算法的效果改变严重时会跟丢目标,因此找到一种能够从面对复杂环境或形变遮挡等不同问题时仍然能够鲁棒、稳定、实时地将运动目标从背景中检测分类并提取出的目标的跟踪算法仍然是目前亟待解决的难题。
为了减少这些问题,将稀疏表示和压缩感知引入跟踪,有效地提高了跟踪速度;局部模板可以解决目标遮挡时产生的视觉漂移问题可以更精确的描述目标;核函数解决了目标和背景相似的问题,改善了因相似引起的漂移问题。压缩跟踪算法的最重要的优势是实时性处理。
1 相关内容
1.1 压缩传感
压缩传感(compressed sensing)[8]是一种投影的理论一种将高维信号到低维空间的投影理论,然后通过求解一个优化问题重构出原信号,可以减少传输、存储信息的成本。

min‖x‖0s.t.y=Φf=ΦΨx=Θx
(1)
如图1所示。

图1 数学模型图Fig.1 Mathematical model
其中维度较高的信号x是由观测矩阵Φ映射到一个低维度的空间y上。通过求解上式的优化问题求得x,来重构信号。首先面临的问题是设计非自适应观测矩阵Φ确保不要丢失在映射过程中信号有用信息。2006年Tao证明了观测矩阵满足有限等距性质RIP(Restricted Isometry Property)的话,那么观测矩阵Θ的列向量几乎是正交的,即保证存在等距映射常数δk使得对所有k-稀疏向量x(只有K个非零值或较大值)有:
(2)
这保证了稀疏信号的欧式距离近似不变,提供了从压缩测量值中高效鲁棒恢复稀疏信号的可能。
1.2 快速压缩跟踪
快速压缩跟踪[9](FastCompressivetracking)是在2014年由zhangkaihua提出的,利用压缩感知进行降维压缩从而提高实时性。
1.2.1 测量矩阵


图2 x降维过程Fig.2 The process of dimensionality reduction of x
1.2.2 贝叶斯矩阵
对每个样本z,它的低维表示是v.设定v中的元素两两独立分布,那么由贝叶斯分类器建立的模型表示如式(3).
(3)

(4)
通过最大化似然估计得到增量更新模型得到的相应的分布估计:
(5)
式(5)描述的高斯分布模型是在线更新的,可以较好的估算特征值。
1.2.3 快速变换
通过搜索半径为γc的Δc像素移动窗口,以之前目标位置为基础搜索目标位置。这产生的窗口比局部穷举搜索法产生的窗口少,所检测到的对象的位置可能略微不准确,但接近准确对象位置。根据粗检测的位置,细搜索进行了一个小的搜索半径γf内少数像素Δf,使目标更准确的被检测出来。
2 局部表示
基于局部信息[11]有利于获得未被阻挡的区域,从而对不同的局部有针对性的做相应的处理,可以根据目标是否形变、遮挡等因素做不同的处理,这样会更精确的描述目标,因此在目标姿势改变,变形和局部遮挡时,局部信息更有优势。
2.1 局部信息构造
对于一个目标,假设目标区域是一个矩形区域,(x,y)表示的为目标左上角的点,矩形区域宽为W,高为H,整个目标区域按照宽一半、高一半进行划分,则每个局部块的大小分别为w=W/2、h=H/2,则每个局部目标左上角位置可以依次表示为:[xy]、[x+w/2y]、[x+wy]、[xy+h/2]、[x+w/2y+h/2]、[x+wy+h/2]、[xy+h]、[x+w/2y+h]、[x+wy+h].但如果选取w、h较大时抗遮挡能力不是很好,减小w、h时,抗遮挡能力会逐渐变好,但计算量会明显增大,因此,通常情况下若遮挡不明显,选取w=W/2、h=H/2,若遮挡明显选取w=W/3、h=H/3.选取w=W/3、h=H/3时,每个局部目标可以左上角位置依次表示为:[xy]、[x+w/2y]、[x+wy]、[x+3w/2y]、[x+2wy]、[xy+h/2]、[x+w/2y+h/2]、[x+wy+h/2]、[x+3w/2y+h/2]、[x+2wy+h/2]、[xy+h]、[x+w/2y+h]、[x+wy+h]、[x+3w/2y+h]、[x+2wy+h]、[xy+3h/2]、[x+w/2y+3h/2]、[x+wy+3h/2]、[x+3w/2y+3h/2]、[x+2wy+3h/2]、[xy+2h]、[x+w/2y+2h]、[x+wy+2h]、[x+3w/2y+2h]、[x+2wy+2h].
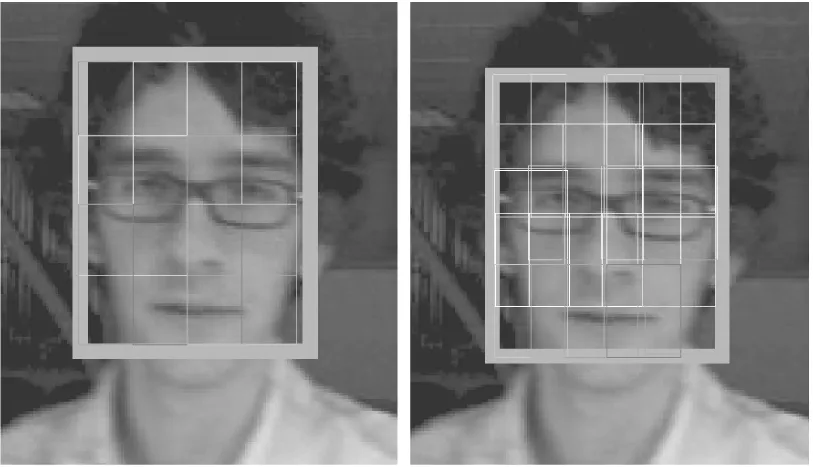
左图为w=W/2,h=H/2,N= 9;右图为w=W/3,h=H/3,N=25
2.2 局部分类器值
每个局部块按照FCT的算法计算分类器值,选择最大的值选定局部目标位置,根据选定的值还原出目标位置。
对于N个局部信息一次按照FCT算法计算分类器值,定义为:
(6)

2.3 跟踪框架
本文用haar-like特征提取特征,用非常稀疏矩阵进行特征压缩,最后利用朴素贝叶斯分类器进行分类,跟踪的示意图如图4所示。
图4主要描述了目标的跟踪过程:(a)在第t帧,我们在目标周围以一个较小的扰动采集若干张图片—正样本和在较远的位置采集若干张图片—负样本,对每个样本进行分割局部信息,通过多尺度变换积分求取haar-like特征,但此时的特征为高维特征,由稀疏测量矩阵对高维特征降维,最后将低维特征拿来去训练朴素贝叶斯分类器。(b)在t+1帧,在t珍目标周围扫描窗口采集n个样本,对其取局部样本,通过多尺度变换积分求取haar-like特征,降维,用第t帧训练好的朴素贝叶斯分类器对低维特征进行分类,得到的分类数值最大的位置就认为是目标。这一过程展示了从t帧到t+1帧的得到目标过程。

图4 主要跟踪过程Fig.4 Main tracking process
表1详细描述了基于局部表示的精确跟踪算法,如下所示:
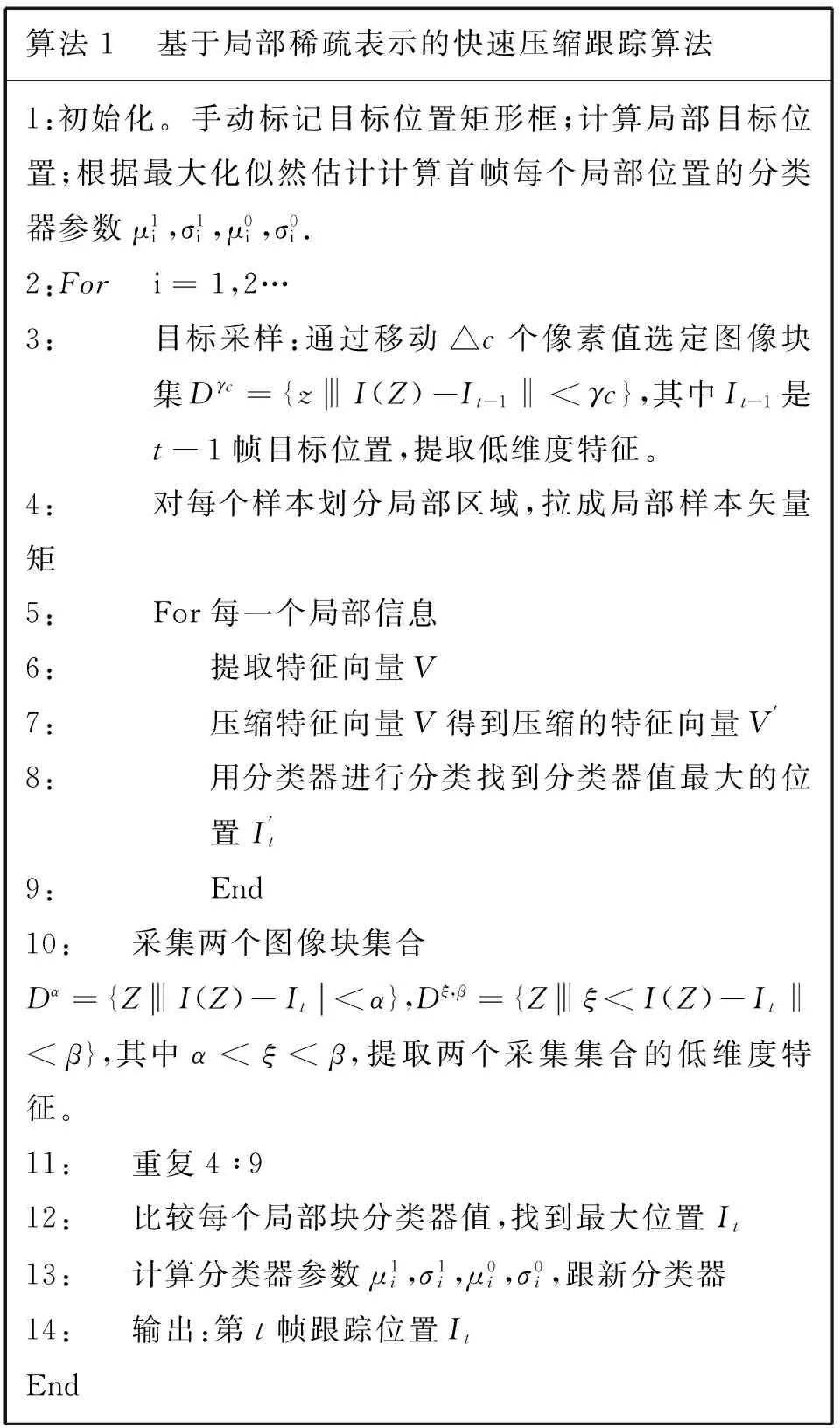
表1 跟踪算法Tab.1 Tracking algorithm
本算法采用由粗到细的滑动窗口进行搜索。通过搜索半径为γc的Δc像素移动窗口,以之前目标位置为基础搜索目标位置。这产生的窗口比局部穷举搜索法产生的窗口少,所检测到的对象的位置可能略微不准确,但接近准确对象位置。根据粗检测的位置,细搜索进行了一个小的搜索半径γf内少数像素Δf.用来平衡计算效率和处理快速区域变化引起的外观变化效率的细搜索过程每五帧更新。
3 算法比较
在实验中,选取了Faceocc1、Faceocc2 2个挑战图像序列来评估本文跟踪算法的遮挡性能。
本算法和具有代表性的三种流行的跟踪算法比较性能,包过Meanshift算法[12],多示例跟踪[13](MIL),和快速压缩跟踪(FCT),在实验过程中,所有算法均选择相同的目标的初始状态。
3.1 实验结果
本实验在Matlab上运行结果如图5所示。

图5 不同算法的跟踪结果Fig.5 Tracking results with different algorithm
如图 5 所示是四种不同跟踪算法的结果,黄色框为Meanshift算法的结果,蓝色框为MIL 跟踪算法的结果,绿色框为FCT 算法的结果,红色线框为本文算法的结果。在FCT中,由于选取的Haar-like特征选取的重要特征,对于遮挡部分可能会未选取到,而本算法中,将目标分成空间信息的重叠块,可以将目标遮挡部分识别出来,从而只利用未遮挡部分的特征。因此,对遮挡的目标序列更有效。从表2跟踪成功率表的数据看出,本文提出的算法在大部分视频序列上成功率都较高,但当目标过小时会失去原有的优势,在大目标的跟踪上表现良好,在标准的视频测试序列中有较鲁棒的效果。
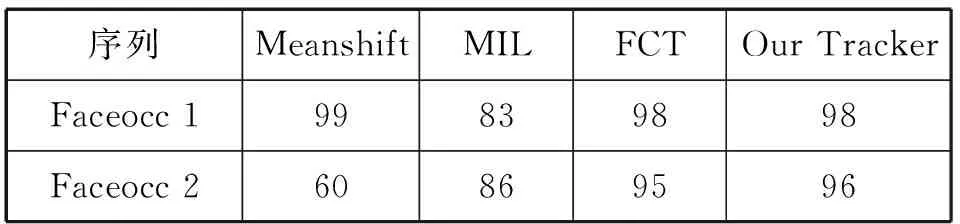
表2 跟踪成功率Tab.2 Tracking success
4 结束语
本文提出的这种基于局部表示的精确跟踪算法,在标准的视频测试序列中定性定量的评价了跟踪结果。在目标视频序列上表现良好,局部稀疏表示的快速目标跟踪算法,有效的处理了局部遮挡等问题,提升分类器性能。实验表明本文提出的算法具有很好的跟踪效果是可行的。
[1] YILMAZ A,JAVED O,SHAH M.Object Tracking:A Survey[J].ACM Journal of Computing Surveys,2006,38(4):1-45.
[2] YANG H,SHAO L,ZHENG F,et al.Recent advances and trends in visual tracking:A review[J].Neurocomputing,2011,74(18):3823-3831.
[3] 闫庆森,李临生,徐晓峰,等.视频跟踪算法研究综述[J].计算机科学,2013,40:204-209.
[4] 张秀琴,陈立潮,潘理虎,等.基于DCT和分块2D2PCA的人脸识别[J].太原科技大学学报,2014,35(5):333-338.
[5] JAIN R,KASTURI R,SCHUNCK B G.Machine vision[M].New York:McGraw-Hill,1995.
[6] FLUSSER J,SUK T.Pattern recognition by affine moment invariants[J].Pattern recognition,1993,26(1):167-174.
[7] BHANU B.Automatic target recognition:state of the art survey[J].IEEE Transactions on Aerospace Electronic Systems,1986,22(4):364-379.
[8] DONOHO D L.Compressed sensing[J].Nformaon Hory Ranaon on,2006,52(4):1289-1306.
[9] ZHANG K,ZHANG L,YANG M.Fast Compressive Tracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2014,36(10):2002-2015.
[10] DIACONIS P,FREEDMAN D.Asymptotics of graphical projection pursuit[J].Ann of Stat,1984,12(3):793-815.
[11] LIU B,HUANG J,YANG L,et al.Robust tracking using local sparse appearance model and k-selection[J].Proc CVPR,2011,42(7):1313-1320.
[12] COMANICIU D,RAMESH V,MEER P.Real-time tracking of non-rigid objects using mean shift[C]∥Computer Vision and Pattern Recognition,2000.Proceedings.IEEE Conference on IEEE,2000:142-149.
[13] BABENKO B,YANG M H,BELONGIE S.Visual tracking with online multiple instance learning[C]∥Computer Vision and Pattern Recognition,2009.CVPR 2009.IEEE Conference on IEEE,2009:983-990.
An Accurate Tracking Algorithm Based on Local Representation
LU Dan,LI Lin-sheng,YAN Qin-shen,LI Hui-xia,LIU Rui-zhen
(School of Electronic Information Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China)
Based on precise tracking algorithm, the local information was introduced into object tracking algorithm,thus effectively improving the problem of occlusion The local information of each part was classified to build local classifier to learn more accurate classification.This algorithm effectively improves the occlusion problem of fast compression tracking so as to make tracking algorithm more accurate.
compressive sensing,local information,target tracking.
2015-03-26
太原科技大学研究生科技创新项目(20134030,20134011,20134012)
芦 丹(1989-),女,硕士研究生,主要研究方向为智能信息与图形图像信息处理、压缩感知。
1673-2057(2015)06-0411-05
TP391
A
10.3969/j.issn.1673-2057.2015.06.001
猜你喜欢
中华书画家(2021年12期)2022-01-06
数学物理学报(2021年2期)2021-06-09
法律方法(2021年4期)2021-03-16
中国生物医学工程学报(2019年6期)2019-07-16
制造技术与机床(2019年4期)2019-04-04
电子技术与软件工程(2017年14期)2017-09-08
计算机应用(2017年4期)2017-06-27
发明与创新(2016年38期)2016-08-22
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
航天返回与遥感(2014年5期)2014-07-31
