
基于柔性铰链的液体粘度测量方法研究
2015-05-09 08:00赵美蓉马金玉
传感技术学报 2015年3期
刘 聪,赵美蓉,马金玉
(天津大学精密测试技术及仪器国家重点实验室,天津 300072)
基于柔性铰链的液体粘度测量方法研究
刘 聪,赵美蓉*,马金玉
(天津大学精密测试技术及仪器国家重点实验室,天津 300072)
针对液体粘度的在线测量问题,提出了一种基于柔性铰链的液体粘度测量方法。采用电磁驱动,使柔性铰链探头在被测液体中进行往复运动;结合专用的电磁线圈驱动电路、信号调理电路以及多路信号同步采集与实时显示、处理软件,基于柔性铰链的平行四边形结构优势,通过检测铰链探头在被测液体中的振动特性,获取相应运动的阻尼因数,从而推算出被测液体的粘度。通过实验研究,实现了对铰链运动振动特性的实时测量、高精度采集和处理,并进行了测量系统标定,建立了阻尼因数与液体粘度的数学模型,最终,通过与标准粘度计的测量结果进行比对,验证了该测量方法的有效性。
液体粘度测量;柔性铰链;电磁感应;阻尼因数
粘度是指液体流动时分子间产生的摩擦阻力的大小,是进行过程检测的重要物理参数[1]。提高液体粘度测量的精确性能够创造更高的经济价值和社会价值。例如,油液的粘度值是油气运移、聚集和油气田开发等环节的关键参考指标之一,油液粘度的微小变化会导致其流动特性发生很大改变,产品百分之一的粘度误差会导致每加仑产品增加1美分的成本。另外,粘度测量在食品、化学、医学及自动工业等领域均具有十分重大的意义[2]。
传统的粘度测量方法已发展相对成熟,主要包括落球法、旋转法、毛细管法等。落球法主要是通过测量落体通过两定点所用的时间来测定粘度,但由于采用手动停表计时,以及人的视觉暂留效应影响,会给实验结果带来计时误差[3];旋转法主要是通过测量流体作用于物体的粘性力矩或物体的转速来确定液体的粘度,但采用指针式读数的方式,使稳定性和读数精度受到一定程度的限制[4];毛细管法虽作为一种很实用的粘度测量方法,但因其结构的限制,容易被小颗粒物堵塞,且清洗干燥非常麻烦[5]。近年来,随着电磁学、声学、光学、传感器技术、微纳制造技术以及计算机技术的日益进步,液体粘度测量技术也在迅速发展,出现了许多新的测量方法。英国的帝国理工大学分别应用磁致伸缩超声导波原理和压电陶瓷技术,通过测量信号的衰减以及频率弥散,实现了对细管道中液体粘度的测量[6-7];立陶宛利用液体粘度对在铝片中传播的超声波的影响,通过测量波形振幅的变化测量液体粘度[8];美国的Cerimovic S、Beigelbeck R等基于MEMS结构,结合压敏电阻电桥电路以及洛伦兹力激励的原理,通过记录电桥输出的振幅和相位的频率响应,测量甘油的粘度[9]。中国科学技术大学的周程将光纤引入光镊系统,应用光纤光镊方法实现了液体的粘滞系数测量[10]。
以上研究方法分别从不同的物理学角度对液体粘度测量进行了探究,但大多还处于理论研究阶段,无法给出精确的测量模型,且部分方法对环境条件要求非常严苛,距离现场应用还有很大距离[11]。本文基于柔性铰链具有弹性好、抗疲劳、振幅大、频率低和一维运动的优点,结合平行四边形的结构优势,在交替电磁力驱动下,使铰链探头进行往复剪切运动,再由霍尔传感器获得铰链的运动特性,建立了相应的数学模型,将液体粘度测量转化为相关物理量间接导出,避免了对液层之间运动阻力的直接测量,减小了测量难度。整个系统简单易行,方便携带,响应速度快,并且稳定性较好。

图1 系统结构图
1 系统实现
柔性机构是一种新型机构,它利用材料的弹性变形来传递运动,其可整体化设计和加工,不需要轴承,因此可以减小机构体积,实现无间隙、无摩擦、高精度运动,目前已被广泛应用于需要精密定位的场合[12]。
图1为整个柔性系统结构图,平行四边形结构的柔性铰链系统,运动灵敏性强,且具有只能在水平方向上来回摆动,而不存在竖直方向运动的优点,有利于提高运动的灵敏度。柔性铰链结构采用铍青铜材料制作,其具有耐腐蚀性强、弹性滞后小、温度系数小并适合制作高精密弹性元件的优点;铰链结构上设有4个螺孔的固定端,保证铰链被完全固定,其最薄部分的厚度为0.1 mm;为使圆形刀片尽可能感知液体粘滞剪切力的作用,避免其他力的影响,将其厚度设计为0.3 mm、半径为9 mm。电磁线圈被嵌于平行四边形的中轴部分,外接放大电路;两磁极片分别吸附在铰链两端,呈对称结构与电磁线圈正对放置。霍尔传感器位于铰链结构中轴线的一端,并与圆柱磁铁正对。
当正弦交变信号经放大电路作用于电磁线圈时,会在其周围产生交变磁场,处于其磁场区域内的两磁极片会带动铰链探头的圆形刀片在被测液体中做往复剪切运动,由于受到液体粘滞剪切力的作用,探头的振动特性将发生改变,霍尔传感器感受圆柱形磁铁周围因运动产生的磁场强度变化,获得铰链运动的振动特征,经信号采集卡上传至计算机,应用Labview软件进行显示、处理和保存。在整个实验过程当中,无需人为实时记录霍尔传感器输出的电压值,只需对不同驱动频率下的感应信号进行保存,再通过数学方法进行数据拟合,便可得到相应的实验参数,整个实验过程易操作,系统响应快且节省人力物力。
本设计选择的霍尔传感器型号为SS49E,是小型、通用、线性、霍尔效应传感装置,具有低噪声输出特点,不需要采用外部滤波,其输出电压可随磁场强度成比例变化,传输特性曲线如图2所示。

图2 霍尔传感器传输特性
圆柱形磁铁高度为8 mm,霍尔传感器仅测量圆柱磁铁轴向中心3 mm范围的磁通量。经仿真图3可得,圆柱磁铁在15 mm~25 mm的测量范围之内,磁场呈线性分布,对应的磁场强度范围为-0.08 mT~0.08 mT,而此线性范围在霍尔传感器所测量的磁场范围(-0.1 T~0.1 T)内,因此圆柱形磁铁的振动位移与霍尔传感器的输出电压成线性关系,可以用霍尔传感器的输出电压值来代替探头的振动情况。
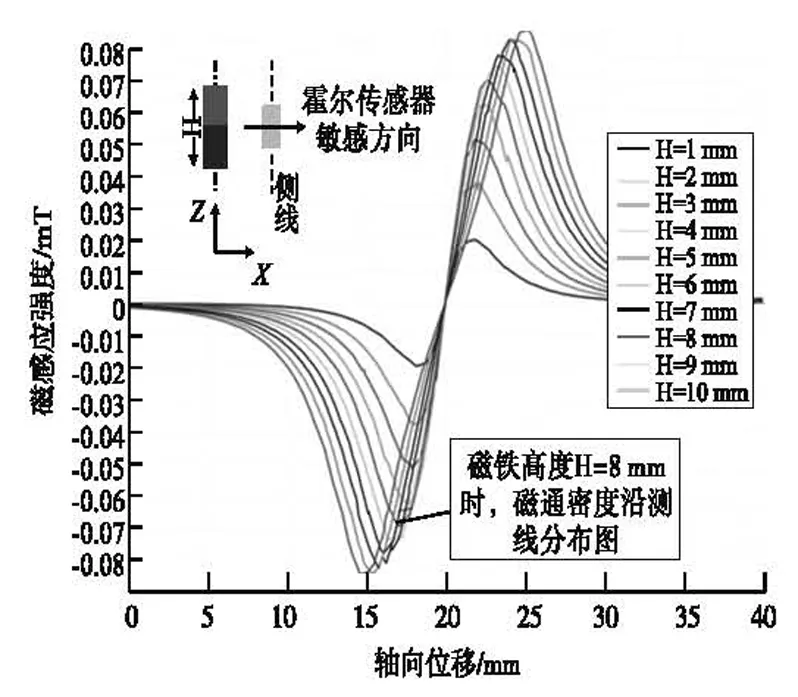
图3 圆柱磁铁磁通密度分布图
2 理论分析
整个铰链结构采用具有交变电压的正弦波驱动,圆形刀片在被测液体中的运动可视作简谐振动,铰链式粘度探头可视为理想“弹簧振子”模型。在铰链的自身弹性力和粘滞阻力的共同作用下,其受迫振动方程[13]为
(1)

(2)
方程稳态解为:
x=Acos(ωt+φ)
(3)
式中:A表示稳定状态下探头受迫振动的振幅,Ф表示稳定状态下受迫振动与驱动力之间的相位差,其中振幅A为
(4)
圆形刀片在被测液体中运动时受到粘滞剪切力作用,振动特性发生改变。当ω=ω0时,即驱动力角频率与系统的固有频率相等时,探头振幅达到最大,产生共振现象,使整个系统最大限度的得到能量,通过采集共振频率周围一定范围内的实验数据,获得探头振动特性的变化特征,结合ω0与共振频率f0的关系式
ω0=2πf0
(5)
应用式(4)进行最小二乘法拟合,便可得出整个系统运动的阻尼因数β,而系统阻尼因数包括铰链自身阻尼因数和液体阻尼因数两大部分,其中铰链自身的阻尼因数可以通过测量系统空载时的振动特性获得,将其设为β0,设S为圆形刀片两面的面积和,η为被测液体的动力粘度,ρ为被测液体的密度,则有[14]
(6)
式中:k1为一个固定系数,只与弹簧振子的质量有关,反推出液体粘度η的表达式为
(7)

(8)
式中:k1、s、f0、ρ均为常数,根据测量拟合得到的阻尼因数β和β0,便可计算出被测液体的粘度值,实现粘度的测量。
3 实验探究
3.1 系统标定实验
实验时,调整被测液面高度到达刀片的黑色刻线处,通过调节驱动电压幅值使铰链的振幅在1mm左右,将此时的电压作为扫频电压;保持驱动电压幅值不变,首先以步进1Hz进行粗扫频,通过计算机Labview界面观察找到共振频率的大致范围(本实验装置的共振频率在7Hz~8Hz范围内);然后在此范围内以步进0.1Hz进行细扫频,进一步确定共振频率的范围(如7.3Hz~7.4Hz);最后,在细扫频的基础之上以步进0.01Hz进行精扫频(如7.31Hz~7.39Hz),至此找到在此种被测液体下探头的共振频率,如7.34Hz。为确保实验的精确性,在确定共振频率之后分别以0.001Hz的步进在其左右各选5个~10个点进行实验测量。应用相同的测量方法,去除被测液体,即测量系统空载时的振动特性。在实验过程当中,每一次扫频时铰链探头的振动特性都已通过计算机进行实时保存。获得以上实验数据之后,应用式(4)进行非线性拟合,得到相应的阻尼因数β和β0的值。
选取粘度值为10mPa·s、20mPa·s、48.83mPa·s、200mPa·s、350mPa·s和500mPa·s的甲基硅油标准粘度液进行粘度测量标定,依照以上实验步骤,分别对每种被测液体进行连续5d的重复性实验,每次实验的时间点相同,将5次所得结果先进行平均处理,再依据式(4)进行拟合,结果如图4所示。
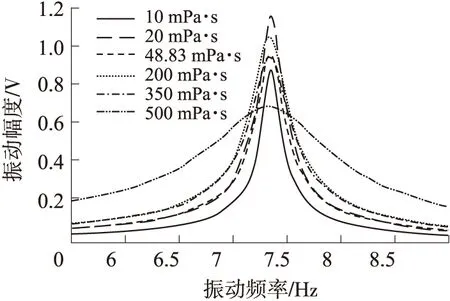
图4 6种标准粘度液测量数据的拟合结果
由图4可知,本实验设计的铰链式粘度传感器探头系统符合弹簧振子数学模型。将拟合得到的阻尼因数β、β0(空载时阻尼因数的值为0.072 4)以及已知的液体粘度值和密度值进行最小二乘法直线拟合,结果如图5所示,拟合得到式(8)中a的值为25.8,由此可得被测液体粘度的计算式为
(9)
从图5可以看出η与(β-β0)2/ρ呈线性关系,与理论推导相一致,说明了柔性铰链式粘度测量方法的可行性。
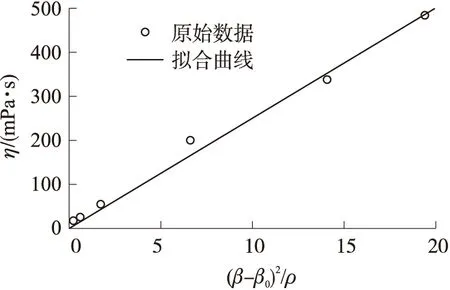
图5 粘度η与(β-β0)2/ρ的关系
3.2 精确度实验及误差分析
应用本实验装置依次对牛奶、花生油、菜籽油以及4种以不同比例混合的聚丙烯酰胺溶液进行实验测量,拟合得出参数β之后,由式(9)计算出被测液体的粘度值,同时应用标准音叉式粘度计SV-10(测量精度为1%)测量各液体粘度,将拟合所得参数及液体粘度值列表如下。
从测量结果可以看出,采用柔性铰链式粘度计测量结果与标准音叉式粘度计测量的结果存在一定偏差,这主要和以下两方面因素有关。首先,由于在测量过程中环境温度的改变导致被测液体分子动能发生变化,影响了被测液体的粘度值[15],进而造成铰链探头的振动特性发生变化,经试验分析,温度每变化1度,铰链探头振幅最多可变化0.1V,这就间接给拟合结果带来误差。其次,由于在调整被测液面到达圆形刀片黑色刻线位置处时,人的视觉因素不能保证液面与刻线每次都严格在同一位置,更换不同的被测液时会对振动振幅产生0.01V以内的浮动,这也会给拟合结果造成误差。试验中环境温度的影响可以通过温度补偿来修正,刀片黑色刻线处液面位置的影响可以通过改进探头结构来避免。

表1 拟合参数与被测液体粘度值
此外,由于传感器探头刀片在被测液体中做往复剪切振动,会使溶液与杯壁之前发生一定程度的撞击,在这里设v为试液的振动速度,v0为振动刀片的最大振动速度,y为振动的试液层至振动片的距离,那么v与y的关系可由式(10)表示[16]。
(10)
经仿真得则v-y关系曲线如图6所示。
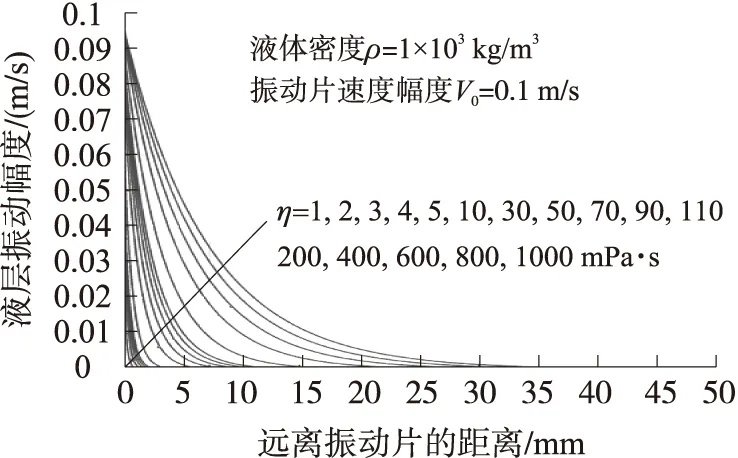
图6 v-y关系仿真曲线
在本实验中,振片的最大速度为0.1m/s,试液层至振动片的最远距离为36mm。从图6可以看出,当y值大于25mm时,液层振动速度降为零,所以在进行实验时应选择相对直径较大一点的容器,避免杯壁造成的误差影响。
4 结论
利用柔性铰链探头往复运动的阻尼因数与液体粘度的关系,设计了具有平行四边形结构优势的柔性铰链式粘度测量装置,提出了基于阻尼因数的粘度测量方法,并通过实验进行了验证。结果表明:整个实验装置及方法切实可行,液体粘度与柔性铰链运动的阻尼因数之间,具有良好的相关性,实验装置易于搭建,响应速度快,测量结果稳定准确。因此,该实验装置在液体粘度在线测量问题上,开辟了一个新的途径。
[1]孙培元,赵美蓉,马金玉. 两种典型扭振式粘度测头的灵敏度对比分析[J]. 传感技术学报,2013,26(1):53-57.
[2]任龙. 智能石油产品运动粘度测定仪设计[D]. 长春:长春理工大学,2012:3-9.
[3]施庆珊,王计伟,欧阳友生,等. 非牛顿流体粘度测定方法研究进展[J]. 发酵科技通讯,2011,40(2):42-45.
[4]廖勇前. 毛细管粘度计在测量非牛顿流体粘度中的使用方法和注意事项[J]. 河南科技,2013,6(11):51-53.
[5]吴阳平,滕召胜,林海军,等. 基于电容传感器的毛细管粘度计液位自动检测方法[J]. 传感技术学报,2009,22(7):1061-1065.
[6]Kazys R,Mazeika L,Sliteris R,et al. Measurement of Viscosity of Highly Viscous Non-Newtonian Fluids by Means of Ultrasonic Guided Waves[J]. Ultrasonics,2014,54(4):1104-1112.
[7]赵爱荣,陈雨,刘丽,等. 埋入式压电陶瓷厚度对激励声能影响的有限元分析[J]. 传感技术学报,2014,27(2):178-163.
[8]Kazys R,Sliteris R,Raisutis R,et al. Waveguide Sensor for Measurement of Viscosity of Highly Viscous Fluids[J]. Applied Physics Letters,2013,103(20):100-102.
[9]Cerimovic S,Beigelbeck R,Antlinger H,et al. Sensing Viscosity and Density of Glycerol-Water Mixtures Utilizing a Suspended Plate MEMS Resonator[J]. Microsystem Technologies,2012,18(7-8):1045-1056.
[10]周程. 光纤光镊与激光多普勒技术应用于流体力学量测量[D]. 中国科学技术大学,2009:3-10.
[11]Rostocki A J,Tarakowski R,Kieczyński P,et al. The Ultrasonic Investigation of Phase Transition in Olive Oil up to 0.7 GPa[J]. Journal of the American Oil Chemists’Society,2013,90(6):813-818.
[12]裴旭,李远玥,侯振兴. 大行程转动柔性铰链性能测试及实验[J]. 光学精密工程,2013,21(4):927-933.
[13]杨欢. 大学物理[M]. 天津:天津大学出版社,2005:3-19.
[14]陈惠钊. 粘度测量[M]. 北京:中国计量出版社,2003:117-122.
[15]Sato Yoshiyuki,Yoshioka Hiroki,Aikawa Shohei,et al. A Digital Variable-Angel Rolling-Ball Viscometer for Measurement of Viscosity,Density,and Bubble-Point Pressure of CO2and Organic Liquid Mixtures[J]. Int J Thermophys,2010,31(10):1896-1903.
[16]陈惠钊. 粘度测量[M]. 北京:中国计量出版社,2003:117-122.
Study on the Measurement Method of Liquid Viscosity Based on Flexible Hinge
LIUCong,ZHAOMeirong*,MAJinyu
(State Key Laboratory of Precision Measuring Technology and Instruments,Tianjin University,Tianjin 300072,China)
Aiming at the problem of on-line measurement of the liquid viscosity,a method based on the style of flexible hinge was proposed to measure the viscosity of the liquid. Driven by electromagnetic,the hinge probe moved back and forth in the measured liquid. With special electromagnetic coil driver circuit,signal conditioning circuit and multi-channel signal collected synchronously and displayed in real time and processing software,based on the advantage of parallelogram structure of the flexible hinge,by measuring the vibration characteristics of the hinge probe in the measured liquid,the corresponding movement damping factor was obtained to compute the viscosity of the liquid. Vibration characteristics of hinge movement can be measured in real time,collected and processed precisely through experiments,system calibration,damping factor and liquid viscosity mathematical model were accomplished. Finally,the efficiency of the measurement method was proved by comparative study with a standard viscometer.
liquid viscosity measurement;flexible hinge;electromagnetic induction;damping factor

刘 聪(1988-),女,硕士研究生,天津大学精密仪器与光电子工程学院,主要研究方向为液体粘度测量,841853995@qq.com;

赵美蓉(1967-),女,教授及博士生导师,天津大学精密仪器与光电子工程学院,主要从事光电测控技术、视觉检测技术和微纳测控技术的科研与教学;

马金玉(1986-),女,博士,天津大学精密仪器与光电子工程学院,主要研究方向为液体粘度测量。
2014-10-15 修改日期:2014-12-11
C:7230
10.3969/j.issn.1004-1699.2015.03.002
TP23
A
1004-1699(2015)03-0310-05
猜你喜欢
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
小学生学习指导(中年级)(2021年3期)2021-04-06
小学生学习指导(低年级)(2020年9期)2020-11-09
民用飞机设计与研究(2019年2期)2019-08-05
北方工业大学学报(2019年5期)2019-03-30
北京汽车(2019年6期)2019-02-12
小学生学习指导(中年级)(2018年9期)2018-11-29
汽车电器(2018年10期)2018-11-01
