基于MATLAB/Simulink的交流电机建模与仿真
2015-05-07 02:49:36王赞王红平
机械工程师 2015年2期
王赞, 王红平
(长春理工大学 机电工程学院,长春 130022)
0 引 言
计算机仿真技术是现代产品开发和科学实验的新方法,特别是采用电力半导体件对电机进行交流调速的过程中,计算机仿真技术优势巨大。MATLAB具有快速的数据处理能力和强大的图像绘制能力。利用MATLAB中的Simulink的模型可以建立系统的仿真模型,从而可大大提高仿真的速度和准确度。本文利用MATLAB/Simulink构造一个交流电机模型,并根据得出的仿真结果,判断其可靠性。
1 异步电机模型搭建
本文先求解了异步电机在两相静止α、β坐标系上的数学模型,如图1所示,根据数学模型进行了建模和仿真。

图1 电机的建模与仿真
写成状态方程X′=AX+BU的形式:


式中:Lr为转子自感;Ls为定子的自感;Lm为定子和转子的互感;R1为转子的电阻;Pn为电机的极对数;R2为定子的电阻;J为电机的转动惯量;ω 为电动机的角速度;iα1、iβ1表示转子在 α、β 两相静止坐标系下的电流;iα2、iβ2表示定子在α、β两相静止坐标系下的电流。
MATLAB中异步电机的仿真模型可以利用式(2)、式(3)、式(4)进行搭建,因为在矩阵(1)含有变量,所以构建的是非定常系统。在此可以利用Simulink中模块将矩阵(1)分解为时变和定常两个矩阵,其形式如:A=A1×ω+A2,A1和A2表示两个定常矩阵,然后根据公式得到向量化的矩阵和,最终搭建了如图1所示的异步电机的仿真模型。
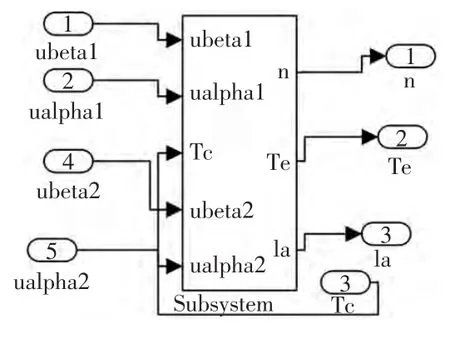
图2 模块的封装
2 模型的封装
所谓模型的封装,为了简化图形,简化功能模块的个数,可以重复使用子系统,有利于建立多层次的模型,方便对模块的选择和利用,把模块连接起来,最终就构成了子系统。模块的封装主要包括以下两种形式:一是通过添加Subsystem模块创建子系统;二是通过组合以后的模块创建子系统。本文建立的交流异步电机的仿真模块的封装采用了第二种方式。模块封装图如图2所示。
3 异步电机的仿真与验证
为了验证搭建的模型是否正确,将电压为380 V、频率为50 Hz的三相正弦电压通入电机中。在初始适合时,加负载T=8.00N·m的恒定转矩,电机参数设定为:R1=4.03Ω,R2=3.05Ω,Ls=0.666 mH,Lr=0.670 mH,Lm=0.666 mH,J=0.01 kg/m2,Pn=2。然后将 iα2、iβ2进行坐标变换,获得定子的三相电流ia、ib和ic,仿真出定子、转矩和转速的时间响应图,如图3~图5所示。根据仿真波形可以知道,所搭建的仿真模型和异步电机的运行特性基本一致,因此所建立的电机的仿真模型正确。
4 结语
1)本文基于异步电动机在两相静止α、β坐标系上的数学模型搭建异步电动机的仿真模型。仿真结果表明,其数据准确、模型可靠,而且编制仿真模型方法简单、具有可读性,很容易实现扩展。
2)通过MATLAB搭建电动机模型,可以应用于后续的实验仿真中。

图3 定子的时间响应
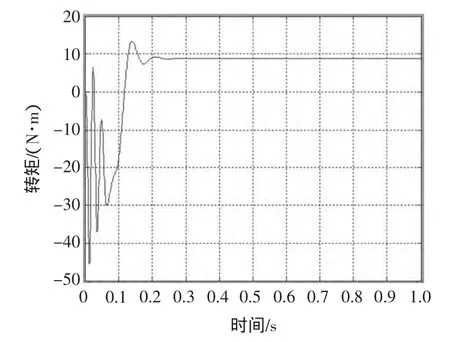
图4 转矩的时间响应

图5 转速的时间响应
[1] 周克亮,陈坚,康勇,等.基于MATLAB/SIMULIN,K的逆变器一交流电机系统的建模与仿真[C]//第5届中国交流电机调速传动学术会议论文集,1997.
[2] 陈伯时,陈敏逊.交流调速系统 [M].北京:机械工业出版社,1998:45-46.
[3] 付扬.笼型异步电机的建模与Simulink仿真[J].抚顺石油学院学报,2003(1):74-78.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
防爆电机(2021年1期)2021-03-29 03:02:46
防爆电机(2020年5期)2020-12-14 07:03:58
防爆电机(2020年4期)2020-12-14 03:11:16
铁道通信信号(2020年3期)2020-09-21 09:13:00
测控技术(2018年2期)2018-12-09 09:00:52
铁道通信信号(2018年8期)2018-11-10 05:15:44
电机与控制应用(2015年10期)2015-03-01 03:50:16
电力工程技术(2014年1期)2014-03-20 14:19:06
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:10