
雷达导引头三种抗遮挡技术的适用性分析
2015-04-20 00:44李庚泽顾村锋
制导与引信 2015年1期
李庚泽, 顾村锋, 朱 俊, 李 嵘
(1.92941部队,辽宁 葫芦岛125000;2.上海机电工程研究所,上海201109;3.上海航天技术研究院,上海201109)
0 引言
脉冲体制主动雷达导引头大多采用高重频信号,存在遮挡效应。回波信号进入遮挡期时,信号能量急剧下降,导引头无法正常探测目标,甚至错锁干扰或杂波。在低空、超低空状态下,还有可能锁定镜像目标,测角精度降低,影响导引头跟踪性能。雷达导引头有三种常用的抗遮挡技术:变重频抗遮挡法[1]、遮挡期外推法[2]、遮挡预判法。
本文在介绍遮挡效应及其对导引头影响的基础上,分析三种抗遮挡技术的适用场合,为导引头抗遮挡技术的选用提供依据。
1 遮挡机理与影响
1.1 遮挡机理
脉冲体制主动雷达导引头接收到的目标回波信号功率为

式中:P 为发射功率;G 为天线增益;λ 为工作波长;σ为目标雷达散射截面;Rmt为弹目距离;L1为系统损耗;L2为大气损耗;τr为接收波门宽度;d为遮挡因子。接收波门宽度τr是指每个探测周期内可接收回波信号的时间宽度,如图1所示。

图1 遮挡波门示意图
图1中,实线为发射脉冲,虚线为接收波门,阴影部分为回波脉冲。当Δτ由Tr→0变化时,回波信号的遮挡状态为“全遮挡→部分遮挡→无遮挡→部分遮挡→全遮挡”。
遮挡因子d 的计算式为

式中:τt为发射脉冲宽度;τr为接收波门宽度;τp为信号保护间隔;Tr为信号周期(Tr=τt+τr+2τp);Δτ 为 时 间 延 迟 相 对 信 号 周 期 的 模,Δτ =mod(τ,Tr);τ 为 接 收 信 号 的 时 间 延 迟(τ =2Rmt/c,c为光速)。
图2给出了一种典型弹道下,导引头接收能量变化的仿真结果。设定的仿真参数:P=100 W;G=30dB;λ=3.75cm;σ=2m2;L1=5dB;L2=(0.1 Rmt/1 000m)dB;Tr=1/300kHz;τt=0.4Tr;τr=0.5Tr;τp=0.05Tr。

图2 典型弹道情况下的目标回波能量变化
接收能量随着弹目距离减少(对应于时间增大)而增大,同时存在周期性遮挡现象。
1.2 遮挡影响
(1)镜像影响
在低空、超低空弹道情况下,导引头除了接收来自目标的能量外,还可能接收来自镜像目标的能量。采用图2设定的仿真弹道,得到图3所示的导引头接收的目标回波能量与和镜像信号能量的对比图。在镜像目标能量的仿真过程中,考虑了地面或海面反射系数的影响,且认为导弹-目标距离与导弹-镜像目标距离近似相等,则导引头接收到的镜像目标能量为

式 中:Pr,i为 镜 像 目 标 回 波 能 量;σt,i为 生 成 镜 像信号对应的目标雷达散射截面;ρ(β)为地面(海面)反射系数,随擦地(海)角β变化;Rm,i为导弹-镜像目标距离。
在仿真中,引用了文献[3]的垂直极化条件下的地面(海面)反射系数模型,该模型可表示为

其中:

式中:ε为复介电常数,取近似值为65-j30.7[3];Δh为反射面起伏高度,取为0.1m。

图3 目标与镜像能量示意图
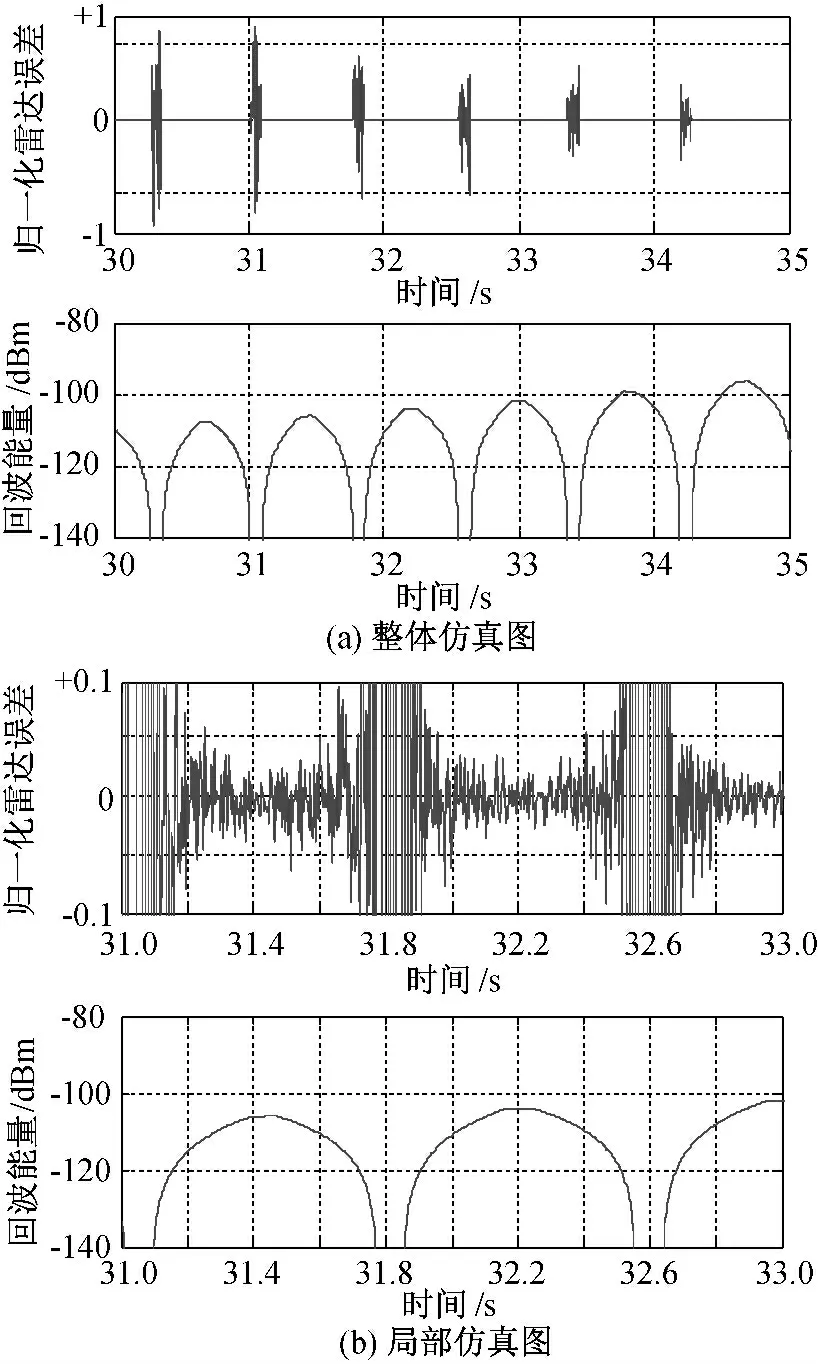
图4 雷达误差仿真图
由图3(a)可见,整体上镜像能量小于回波能量。从局部放大后的图3(b)可以发现,当目标回波能量进入遮挡期后,镜像回波能量存在大于目标回波能量的时刻,这不仅会引入跟踪误差,甚至会导致误锁镜像目标。
(2)对雷达误差的影响
基于比幅单脉冲体制,进行雷达误差影响仿真分析。导引头天线的和差方向图分别为

式中:θ为视线偏离角;θb为3dB波束宽度。
雷达误差为

式中:real表示取实部。
图4给出了典型弹道情况下导引头雷达误差输出值,图4(a)为整体图,图4(b)为局部放大图。
由图4可见,当目标回波信号进入部分遮挡和全遮挡后,导引头回波通道能量下降,导致信噪比降低,引起雷达误差波动加大,其量级远远大于正常雷达误差值,已无法满足制导控制系统的要求。
2 抗遮挡技术
2.1 变重频抗遮挡技术
(1)基本原理
文献[1]中给出了变重频抗遮挡方法。
由式(2)可知,当(τt+τp)≤Δτ<(τr+τp)时,可使导引头回波信号处于无遮挡期,考虑到Δτ=mod(τ,Tr),其中τ由弹目距离决定,Tr为照射信号重复周期。改变Tr,使得Δτ 满足(τt+τp)≤Δτ<(τr+τp)的要求,可实现变重频抗遮挡。
(2)适用场合
原理上,变重频抗遮挡方法可以消除遮挡效应。变重频是以精确测距为基础的。若采用(200~500)kHz的高重频,遮挡周期对应的弹目距离变化为(300~750)m。采用图2 仿真时的波形参数,无遮挡期占整个周期的10%,也可以通过降低发射脉冲的占空比,增加无遮挡期,但会降低导引头发射机效率。显然,测距误差应远小于距离变化范围的10%,若以1%计算,(200~500)kHz重频范围对应的测距误差为(3.0~7.5)m。测距精度计算式为

式中:ΔR 为测距精度,c为光速;B 为信号带宽。
由式(10)可以求得满足(3.0~7.5)m 测距精度要求的信号带宽为(20~50)MHz。
显然,变重频抗遮挡技术适用于宽带导引头系统,窄带脉冲多普勒体制的导引头将无法实现变重频抗遮挡功能。
2.2 遮挡期外推技术
(1)基本原理
文献[2]给出了基于遮挡期外推技术的抗遮挡方法。为了降低遮挡期对导引头角度跟踪系统、频率跟踪系统和制导系统的影响,在角度跟踪系统中增加了速度反馈控制、在速度跟踪系统中增加了加速度反馈控制,在制导系统中采用状态卡尔曼滤波。遮挡期间,三个系统都采用外推控制,尽量减小误差。
(2)适用场合
遮挡期外推法可减少角度环路、速度环路和制导系统在遮挡期的跟踪误差。在处理过程中,回波信号处于部分遮挡期和遮挡期时,导引头受信噪比的影响,面临雷达误差增大,制导指令恶化等问题。此外,镜像目标影响问题也未得到解决。
2.3 遮挡预判技术
(1)基本原理
由式(2)可知,导引头接收信号的遮挡周期与导引头照射信号重复周期Tr一致。每个遮挡周期中,弹目距离变化值为cTr/2,在特定信号重复周期Tr情况下,若获得遮挡期或无遮挡期的起始点,并精确得到弹目相对速度,即可判断遮挡期的起始和结束时刻。
图5给出了能量峰值点为起点的遮挡预判示意图。假设某一时刻能量峰值点对应时刻为tT,后续遮挡预判时刻点为tZ,两点间的弹目距离变化为L,则预判的遮挡起始点可表示为

式中:v(t)为弹目相对速度。
显然,两点间对应的弹目距离变化L 与两个时刻内弹目相对速度的时间积分相等。

图5 遮挡预判示意图
(2)适用场合
通过遮挡预判,可以预知遮挡期到来的时刻,可以在遮挡期到来前关闭接收通道,防止导引头误锁目标镜像信号,避免恶化雷达误差。遮挡预判技术的实现,需要精确获得回波能量峰值点和弹目相对速度。采用原始回波数据求导、平滑滤波,再拟合的方法,可精确获得回波能量峰值点。
在主动雷达导引头中,相对速度与多普勒频率的关系为

式中:v(t)为弹目相对速度;λ为工作波长;fD为弹目多普勒频率。
由导引头的速度跟踪环路可以测得多普勒频率,频率分辨率与导引头接收机的采样率有关,可达赫兹级。设频率分辨率为50 Hz,则速度分辨率约为1m/s。弹目相对速度通常在1km/s以上,1 m/s的速度跟踪分辨率足以忽略速度跟踪环路带来的测速误差,使遮挡预判技术的实现成为可能,遮挡预判技术不受导引头带宽的影响,可适用于窄带导引头系统。
图6所示为典型弹道下回波峰值能量点和预判点获取仿真图。
由图可见,即使受到噪声影响,也能很好地找到回波能量峰值点。
遮挡预判技术的缺点在于进入遮挡期后,关闭了导引头接收通道,在该阶段失去了目标信息。
3 抗遮挡技术适用性
在工程应用中,可依据导引头体制有针对性地选择抗遮挡技术。

图6 回波能量峰值点和预判点仿真图
对于宽带体制的导引头,可以在精确测距的基础上,采用变重频抗遮挡技术,消除遮挡对导引头的影响。
对于窄带导引头体制,变重频技术已不适用。单纯的遮挡期外推技术也不能完全消除遮挡对导引头的影响。综合利用遮挡预判和遮挡期外推技术,可以在遮挡期前关闭接收通道,防止雷达误差和导引头指令恶化,避免误锁镜像目标,同时在部
分遮挡和遮挡期实现各种环路的外推控制。
4 结论
脉冲体制主动导引头存在遮挡效应,在遮挡期导引头易受镜像目标影响,恶化雷达误差。
变重频、遮挡外推和遮挡预判三种抗遮挡技术有各自适用场合。分析表明:对于宽带体制的导引头可采用变重频抗遮挡技术,消除遮挡问题;对于窄带体制的导引头可结合遮挡外推和遮挡预判技术,降低遮挡对导引头和制导系统的影响。
在工程应用中,可以综合运用多种抗遮挡技术,提高抗遮挡效果。
[1] 郭玉霞,吴湘霖,张德峰.雷达导引头变重频抗遮挡算法设计[J].航空兵器,2009,(3):28-30.
[2] 沈亮,李合新.PD 雷达导引头的遮挡现象及其处理方法[J].制导与引信,2007,28(1):1-6.
[3] Lang M W(著),薛德镛(译).陆地和海面的雷达波散射特性[M].北京:科学出版社,1981.
猜你喜欢
弹箭与制导学报(2022年2期)2022-06-06
汽车工程师(2021年12期)2022-01-18
舰船电子工程(2021年4期)2021-05-25
进出口经理人(2021年8期)2021-02-12
出版人(2020年5期)2020-11-17
今日农业(2019年14期)2019-01-04
兵器装备工程学报(2017年4期)2017-04-28
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
