
电动汽车移动储能辅助频率控制策略的研究
2015-04-19 11:49:44贾利民姜久春张维戈
电工技术学报 2015年11期
鲍 谚 贾利民 姜久春 张维戈
(1.北京交通大学国家能源主动配电网技术研发中心 北京 100044 2.北京交通大学交通运输学院 北京 100044)
电动汽车移动储能辅助频率控制策略的研究
鲍 谚1,2贾利民2姜久春1张维戈1
(1.北京交通大学国家能源主动配电网技术研发中心 北京 100044 2.北京交通大学交通运输学院 北京 100044)
大量电动汽车接入电网后,不仅可以作为可控充电负荷存在,也可以作为移动储能装置为电网提供服务与支持。首先分析了电动汽车参与电网频率控制的优势,介绍了一种移动储能辅助调频系统的结构框架及工作机理。基于电力系统频率调节控制基本动态模型,建立了电动汽车参与电网一次、二次频率调节控制的模型。在此基础上,针对相关研究较少考虑电动汽车车辆属性的特点,提出了计及车辆限制和用户需求的电动汽车参与电网频率调节的控制策略。该策略能够满足车辆用户用车时间和容量的个性化需求,同时有效避免了荷电状态超限和充放电电流倍率过大对电池造成的不利影响。最后,通过两个算例对提出的模型和控制策略进行了研究分析,验证了模型与策略的可靠性。
电动汽车 辅助调频 车辆限制 用户需求 控制策略
0 引言
近年来,世界各国面临日益严峻的能源与环境危机,纷纷加大对新能源和环保领域的支持力度,智能电网、电动汽车(Electric Vehicle,EV)已成为研究开发的热点问题。美国政府已将能源产业转型发展设定为经济复苏计划的核心,目的是通过发展智能电网、电动汽车、可再生能源等新型产业,构筑世界领先的能源安全供应体系,增强应对世界气候变化的能力。中国目前是世界第二大能源消费国,化石能源消费的增长势头还在继续,不仅影响国家的经济发展,更关乎国家能源安全。早在“十一五”时期我国就提出了“节能减排”,并于2007年通过了《中华人民共和国节约能源法》,将节能减排与可持续发展确定为基本国策。“十二五”期间分别针对“智能电网”和“电动汽车”制定了专项规划,不断加大对智能电网、电动汽车等新兴能源领域的投入与支持力度,提出到2015年电动汽车保有量达到100万辆的目标[1]。
大规模电动汽车接入电网进行能量补给,构成了电力系统中一种新型可控负荷[2,3]。与此同时,基于私人汽车每天96%的时间处于停驶状态的统计结果,电动汽车还可以利用车载动力电池作为分布式储能装置为电力系统提供服务,这就是V2G(Vehicle-to-Grid)移动储能的基本思想[4,5]。电动汽车作为系统中分布广泛的移动储能装置,属于智能电网分布式资源的重要组成部分。在大规模电动汽车应用后,有效利用数量庞大、位置分散的电动汽车参与电网的频率调节,发挥其相对传统调频机组的优势,更好地为电力系统服务,已成为电动汽车移动储能研究的主要方向之一。
国外多数研究人员认为,频率调整由于更短的能量交互时间和更高的辅助服务价格,是电动汽车与电网互动最有价值和前景的方向。早在2002年AC propulsion公司就将一辆甲壳虫电动汽车接入加州电力系统参与调频辅助服务[6]。文献[4,7,8]分析了电动汽车适合参与的电力市场,提出了V2G收入与支出的计算方法以及V2G的商业模型,指出V2G参与频率校正服务可获得明显的收益。文献[9]根据真实市场数据从经济角度分别研究了电动汽车参与德国、瑞典调频市场的收益,仿真表明电动汽车辅助调频在德国每车可获得30~80欧元/月的收益,然而在瑞典校正市场是没有收益的。文献[10]针对不同车辆类型进行了V2G可用容量的评估,对于电动汽车的移动储能应用具有基础性意义。文献[11]建立了EV参与负荷频率调整的模型,研究了其控制作用和效果。文献[12]提出了基于线性矩阵不等式的电动汽车参与负荷频率控制的方法。文献[13]提出了计及电动汽车静态频率特性的负荷频率控制方法。文献[14]针对英国电力系统研究了不同场景下电动汽车参与一次调频的效果。文献[15,16]提出了自治的分布式V2G一次调频控制策略,策略考虑了电动汽车的充电需求,根据接入点频率偏差提供分布式旋转备用。文献[17]提出了一种通过集群EV、可控家庭热设备、分散热电联产发电机组跟踪二次调频信号的方法,通过模型预测控制策略实现参与机组的控制分配。文献[18]提出了一种按照容量和响应速度分配负荷频率控制信号的方法,协调EVs和热泵参与调频控制,车辆荷电状态(State of Charge,SOC)被控制在85%±5%范围内。总体来看,在电动汽车参与电网频率调节方面,国内相关文献尚未考虑电动汽车用户的使用需求,相对弱化忽略了电动汽车固有的交通工具属性。国外有些文献考虑了将参与频率调节的电动汽车SOC限制在一定范围内,但未考虑车辆的充电需求;也有极少数文献考虑了充电需求,但其控制策略只针对电动汽车参与一次频率调节的情况。
合理的电动汽车辅助调频控制策略,需要综合考虑电网、电池、用户三方面需求。本文首先分析了电动汽车参与电网频率调节的优势。接着给出了一种移动储能辅助调频系统的结构框架,阐述了其工作机理。随后在电力系统频率调节控制的基本动态模型基础上,建立了电动汽车参与电网一次、二次频率调节控制的模型。在此基础上,针对相关研究较少考虑电动汽车车辆属性的特点,提出了计及车辆限制和用户需求的电动汽车参与电网频率调节的控制策略。该策略能够满足车辆用户用车时间和容量的个性化需求,同时有效避免了荷电状态超限和充放电电流倍率过大对电池造成的不利影响。最后,通过两个算例对提出的电动汽车辅助调频系统的模型以及计及车辆限制和用户需求的电动汽车辅助调频控制策略进行了研究分析,验证了模型与策略的有效性。
1 电动汽车参与电网频率调节的优势
电网频率与电力用户和发电厂自身的安全、效率有着密切的关系。一方面,频率不稳定将影响工业企业的电动机转速和输出功率及各领域电子设备的正常运行,从而影响生产质量和效率。另一方面,频率异常将导致振动应力作用于汽轮机叶片,加速发电机零部件磨损,影响电厂水泵、风机等设备的性能,引起发电能力下降,甚至造成发电机解列。
当前电力系统的频率控制在大系统层面统一调度实施,而具备与电网互动能力的电动汽车一般在配电网0.4 kV处接入,是系统中分布广泛的移动储能装置,其参与电网频率调节具有以下优势:
1)对负荷波动响应迅速。
调频机组的调频响应速度决定了频率恢复的速度,因此发电机应在保证机组安全的情况下尽量提高一次调频的动态响应速度[11]。但由于发电机机械部件响应时间的限制,一般火电机组在30 s内功率变化达到峰值,燃机发电机组在20 s内一次调频功率达到峰值,水电机组在15 s内一次调频功率达到峰值[19]。相比发电机组调频,电动汽车移动储能通过电力电子设备接入电网,待机状态下达到峰值功率的时间处于毫秒级,其爬坡性能明显优于传统调频机组,能够降低爬坡和负荷交替升降对机组物理性能的影响,实现对于快速负荷波动的有效补偿。
2)接入点靠近负荷中心。
电力传输过程中的有功损耗通常占传输功率的7%~10%,电动汽车接入系统的位置靠近分布式发电装置和负荷中心,能够实现对分布式发电和负荷波动的就地补偿,降低输配电过程中的损耗,提高系统整体的能量利用效率。
3)缓解调频电厂投资建设成本。
从经济角度来看,规模化电动汽车参与电网频率控制能够推迟电力系统在调频电厂及输电线路方面的投资时间,降低一次性投入的成本。
4)参与调频的能量需求低。
相对于调峰或负荷平抑,调频备用属于电力备用,对电能的需求较低,长时间的净能量需求为零。对电动汽车而言,长时间调频能量供给也为零[6,20]。此外,调频面向秒级或分钟级的负荷正负波动分量,电动汽车参与时充放电状态的转换频率高,充放电功率小,充入或放出的能量很快就能实现部分或全部抵消,能量波动较小,参与调频的能量需求相对较低。
5)更高的能量转换效率。
以抽水蓄能电站为例,其参与电力系统频率调节时抽发转换的效率约为75%,而电动汽车移动储能的效率取决于充放电机的效率,充放综合效率大于80%。
6)可调用资源充足。
电动汽车单机容量有限,然而在广泛应用后其数量优势明显,由于其多数时间处于停驶状态,因此可形成充足的储能资源。以北京市为例,2011年夏季最高负荷为15 537 MW,机动车保有量约为500万辆。按照每辆电动汽车充/放电功率为3 kW估算,当电动汽车占全市机动车数量10%时,最大充/放电负荷约占最高负荷的9.7%。若全市机动车中4%为电动汽车,其最大容量相当于一个60万kW的常规火电机组。
此外,由于频率调节控制针对的地理区域较大,车辆分布性、流动性对调频基本没有影响。
2 电动汽车辅助调频系统的结构框架
电动汽车具有数量庞大、接入点分散、单机容量小的特点,考虑调度系统的复杂性与通信压力,不易采用电力调度控制中心对电动汽车直接进行控制。本文采用图1所示的集散式层次化控制结构,将电动汽车移动储能控制中心作为车辆与电网调度的联系纽带。

图1 电动汽车参与电网频率调整的结构框架Fig.1 Framework of EVs providing frequency regulation
首先电动汽车将车辆身份码、电池容量、SOC、可用时间等基本信息发送至移动储能控制中心,控制中心通过这些信息完成对参与调频EV总功率和总能量的计算,并发送给电力调度中心;随后电力调度中心根据所有EV可提供的功率和能量,结合调度计划确定EV参与电网调频的基本控制参数(如电动汽车频率响应系数KEV),经移动储能中心下发至各车辆,实现EV辅助调频的分层分布式控制。这样的控制方式既保障了电网对EV辅助调频的控制及监管,便于电网调度预估EV调节能力及调节效果,同时基本不增加电网调度的控制压力。
电动汽车移动储能控制中心除实现上述功能外,还可承担费用结算的任务。在智能电网体系下,电动汽车与移动储能控制中心签订交易合同,将自身的基本信息(车辆身份码、电池容量等)发送给控制中心后,控制中心竞价参与调频电力市场。EV参与调频备用的收益可以由能量和容量两个因素决定,能量收益依据EV实际提供的总能量(无论充或放)确定,容量收益则根据EV可用最大充/放电功率值及其可用时间确定。当电动汽车违反合同规定时,可对其收益进行一定程度的扣减。本文主要从技术角度探寻电动汽车参与辅助调频的控制问题,交易合同与经济激励的具体问题将体现在后续研究中。
从电力备用角度,电动汽车参与频率调整时,电网所需容量应与传统调频机组提供的容量、电动汽车提供的容量二者之和保持平衡,其中电动汽车提供的容量等于车辆数量与车辆容量(即充放电机的最大充/放电功率)的乘积。此外,电动汽车一般在配电网接入电力系统的位置接近负荷中心,对负荷波动的响应实时性较强,在未来智能电网体系下,可以扩展移动储能控制中心的功能,将配电网负荷及分布式发电纳入其管理范畴,组成局域能量管理系统(Local Energy Management System,LEMS)[20-22],对配电网资源实现统一管理。
3 电动汽车辅助频率控制系统的模型
传统的频率调节控制主要通过调节发电机有功出力实现,一般采用三级频率控制的方式[19],3种频率控制方式在功能上具有互补性,对电力系统频率稳定和经济运行发挥着重要作用。
3.1 电力系统频率调节控制基本模型
电力系统频率调节控制基本模型由同步发电机模型、负荷频率特性模型、一次调频模型、二次调频模型等组成,如图2所示。其中同步发电机模型包括调速器、原动机和发电机惯性3部分[23]。

图2 带积分控制的AGC机组模型组形式Fig.2 Model of AGC unit with integral control
图2 中,Tg为调速器时间常数,Tch为原动机时间常数,这里原动机以非再热式汽轮机为例,ΔPm、ΔPL分别为机械功率和负荷功率的变化量,M为惯性时间常数,D为负荷-阻尼常数,Δω为频率偏移量,R为机组调差率,KI为自动发电控制(Automatic Generation Control,AGC)增益。AGC在定频率控制模式下,其区域控制偏差(Area Control Error,ACE)可表示为
ACE=-B×Δω
(1)
式中,B为区域频率响应系数。
通过ACE可得到AGC调节功率uAGC为
(2)
3.2 电动汽车移动储能辅助频率控制系统的模型
频率是电力系统的共同因子,充放电机可以根据电动汽车接入点的频率偏差,按照接收到的EV调频控制参数,通过调整自身的充放电模式和功率大小调节控制区域的负荷有功功率变化,参与电力系统频率调整。
3.2.1 EV参与电网一次频率控制的模型
充放电机能够模拟发电机组的功频静特性,实现充放电功率与频率间的下垂控制,如图3所示。
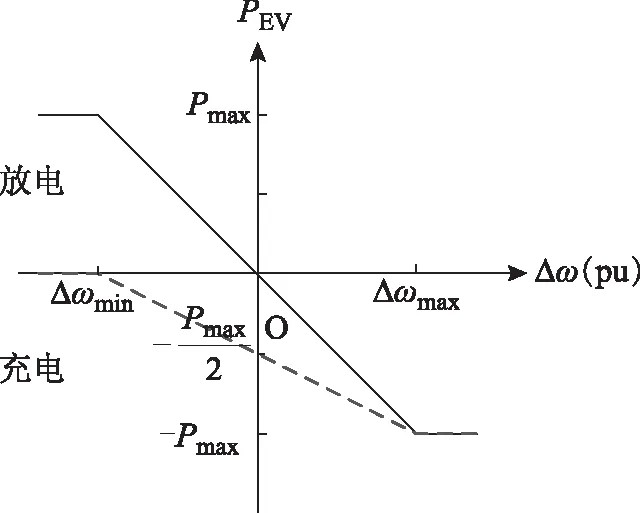
图3 电动汽车参与一次调频时的下垂特性Fig.3 Droop characteristic of EV providing primary frequency regulation
图3中,实线表示V2G模式下的EV一次调频下垂特性,此时电动汽车既可以充电或放电,其最大充放电功率受充放电机限制
(3)
虚线表示单向V2G模式(即通过调节充电功率参与电网服务的模式)下EV一次调频下垂特性,此时电动汽车需要实现能量补充,在无频率偏差的情况下以Pmax/2的功率充电,频率波动时在此基础上以KEV/2为电动汽车频率响应系数参与电网一次调频
(4)
式中,PEV为电动汽车充放电功率,MW(pu);Pmax为电动汽车最大充放电功率绝对值,MW(pu),由充放电机功率和接入点线路容量二者的最小值决定;KEV为电动汽车频率响应系数,MW/Hz(pu),且KEV<0。本文中规定电动汽车放电时功率为正值,充电时功率为负值。
图4为V2G模式和单向V2G模式下电动汽车参与一次调频的模型框图。功率限制模块限制EV的最大充放电功率,EV响应特性模块通过一阶惯性环节反映电动汽车双向变流器及动力电池的响应特性。TEV为EV时间常数,双向变流器在工作模式下响应时间一般为毫秒级,动力电池可认为无响应延时。
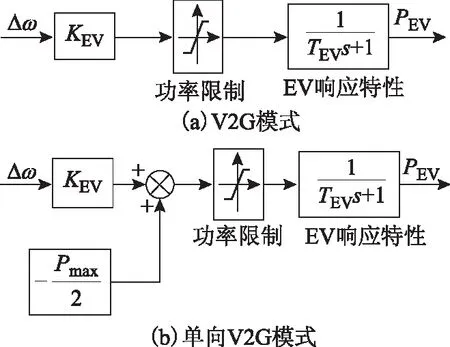
图4 电动汽车参与一次调频的模型Fig.4 Model of EV providing primary frequency regulation
3.2.2 EV参与电网二次频率控制的模型
为了消除稳态误差,使系统频率尽快恢复额定值,可以利用电动汽车参与电网二次频率控制。与发电机组二次调频类似,EV参与二次频率控制可根据区域控制偏差信号控制电动汽车充放电。由式(2)可得EV参与二次调频的调节功率为
(5)
式中,KI_EV为电动汽车AGC控制增益,且KI_EV>0;K2nd_EV为电动汽车二次调频等效增益,且K2nd_EV>0,负号保证充电、放电时uAGC_EV的符号与3.2.1节符号规定一致。
式(3)~式(5)经拉普拉斯变换可得EV调频计算功率ureg_EV为
(6)
图5为两种模式下电动汽车参与一次、二次频率控制的模型框图。实际运行中,可通过在充放电机控制程序中嵌入虚线框中所示的程序模块实现,其输出作为充放电机工作的功率给定值。
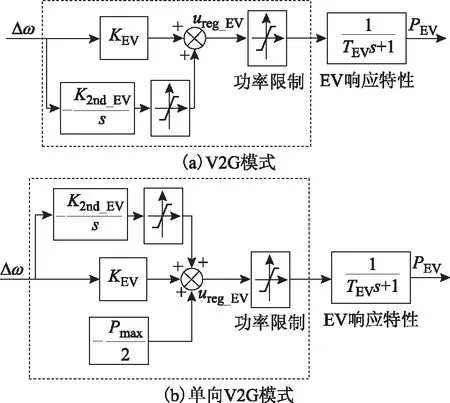
图5 电动汽车参与一次、二次调频的模型Fig.5 Model of EV providing primary and secondary frequency regulation
电动汽车频率响应系数KEV和电动汽车二次调频等效增益K2nd_EV由电力系统调度控制中心经电动汽车移动储能控制中心,采取有线或无线通信方式下发。EV调频参数的确定需要考虑诸多因素并且影响调频控制的效果,本文给出一种计算方法。
电动汽车频率响应系数由电网调度控制中心需EV参与调整的频率波动范围和EV充放电功率限值确定,KEV为
(7)
式中,Pup、Plow分别为电动汽车充放电功率的上、下限,kW;Pbase为电力系统的基准功率,MW;Δfmax、Δfmin分别为电网频率波动值上、下限,Hz;fbase为电网频率的基准值,本文取50Hz。
电动汽车AGC控制增益KI_EV,由系统总AGC控制增益KI依据预测的系统总负荷峰值PLOAD_max(单位为MW(pu))和最大充放电功率绝对值Pmax呈比例计算得到。结合式(5),可得到电动汽车二次调频等效增益为
(8)
4 计及车辆限制和用户需求的电动汽车参与电网频率调节的控制策略
电动汽车的基本属性是交通工具,在作为移动储能装置与电网互动时,首先要考虑车辆用户的用车需求。此外,车载动力电池的容量、充放电电流倍率等限制因素也是EV辅助调频过程中必须考虑的关键问题。
车辆限制中电动汽车车载动力电池的容量及最大、最小SOC的限制保障电池容量处于合理范围,如式(9)。充/放电电流倍率限制防止电流过大影响电池寿命,充电电流限制为C/3(C为电池1 h率容量),放电电流限制为C/2。
SOCmin≤SOC≤SOCmax
(9)
(10)
式中Q为电池组额定容量。二者实现均较为简单,只需在充放电机调频控制程序内嵌入即可,重点研究用户需求这一因素。
考虑电动汽车储能特有的移动性,参与电网频率调节控制的电动汽车需要在储存能量及时间上保障用户用车需求,电动汽车用户需求限制包括用户预先设定的EV辅助调频终止SOC(SOCe)和终止时刻(te)两个条件,如式(11)、式(12)
tb≤tEV≤te
(11)
SOC(te)≥SOCe
(12)
式中,tEV为EV参与调频服务时刻;tb为EV参与调频服务起始时刻;SOC(te)为终止时刻实际的SOC。
要满足上述条件,需要在电动汽车充放电控制器中嵌入EV参与调频的控制策略,策略的具体执行步骤如下:
1)电动汽车根据电池组容量、初始SOC(SOC0)、终止SOC及电池类型等信息计算电池所需补充的能量。在电池组经电池管理系统自动均衡,一致性保持良好的情况下,电池组所需补充的能量E可表示为
(13)
式中,E为某辆电动汽车需要补充的能量,kWh;S为该车动力电池串联数量;OCV为单体电池开路电压。SOC与OCV之间的函数关系根据该车实际电池类型和实测数据确定,以锰酸锂电池为例,则式(13)可表示为[24]
(14)
2)推算在单向V2G模式下该车参与电网调频并达到用户设置终止SOC所需充电时间。由于系统长时间负荷功率波动的均值近似为零[6,20],不难证明EV长时间参与电网一次、二次频率控制的出力均值也近似为零。可依据式(15)推算单向V2G模式下EV参与电网调频并达到用户设置SOCe所需充电时间。
(15)
式中,TU为单向V2G模式下EV参与电网调频并达到设定SOCe所需充电时间,h;ΔTU为单向V2G充电时间裕量,h,一方面用于补充能量E计算时用OCV代替端电压造成的误差,另一方面用于补充电力系统实际负荷波动均值偏移零造成EV参与调频后电池能量的偏移量不为零,进而可能导致所需充电时间偏小的问题,其值的确定需要互动控制中心根据运行数据积累分析得到。
3)依据式(15)得到的EV所需充电时间及参与调频服务起始时间、设定终止时间确定该车参与电网调频的计划。考虑动力电池使用于SOC中间段时寿命衰退较轻,在SOC较高时应减小充/放电电流倍率的特性以及EV用户的用车需求,某EV充放电计划的制定遵循表1中的规则。

表1 电动汽车参与电网调频计划的制定规则Tab.1 Rules for EV participating in frequency regulation
表1中,Ton为某EV可参与电网调频控制的时间,h,等于该车用户设置终止时刻te与参与调频服务起始时刻tb之时差;modeflag为EV调频方式的控制标志,modeflag=1时表示不参与调频控制,modeflag=2时表示工作于单向V2G模式,modeflag=3时表示工作于V2G模式。
4)各EV按照其参与调频的计划及电网给定参数,根据频率实时偏移,通过图5所示的控制程序,参与电网频率调节控制。
5 算例及分析
5.1 含EV辅助调频的频率调节系统及其参数
以定频率控制的单区域电力系统为例进行分析研究,系统的发电功率为300 MW,频率额定值为50 Hz,忽略AGC信号发送的时延,调频机组为火力发电机,原动机为非再热式汽轮机。电动汽车与电力系统频率控制的相关参数如表2所示,其中单区域电力系统模型参数为单区域电力系统典型值[23],电动汽车电池参数采用文献[24]中的电池参数,电网频率波动值上、下限依据GB/T 15945—1995,EV频率响应系数、二次调频等效增益分别由式(7)、式(8)计算得到。
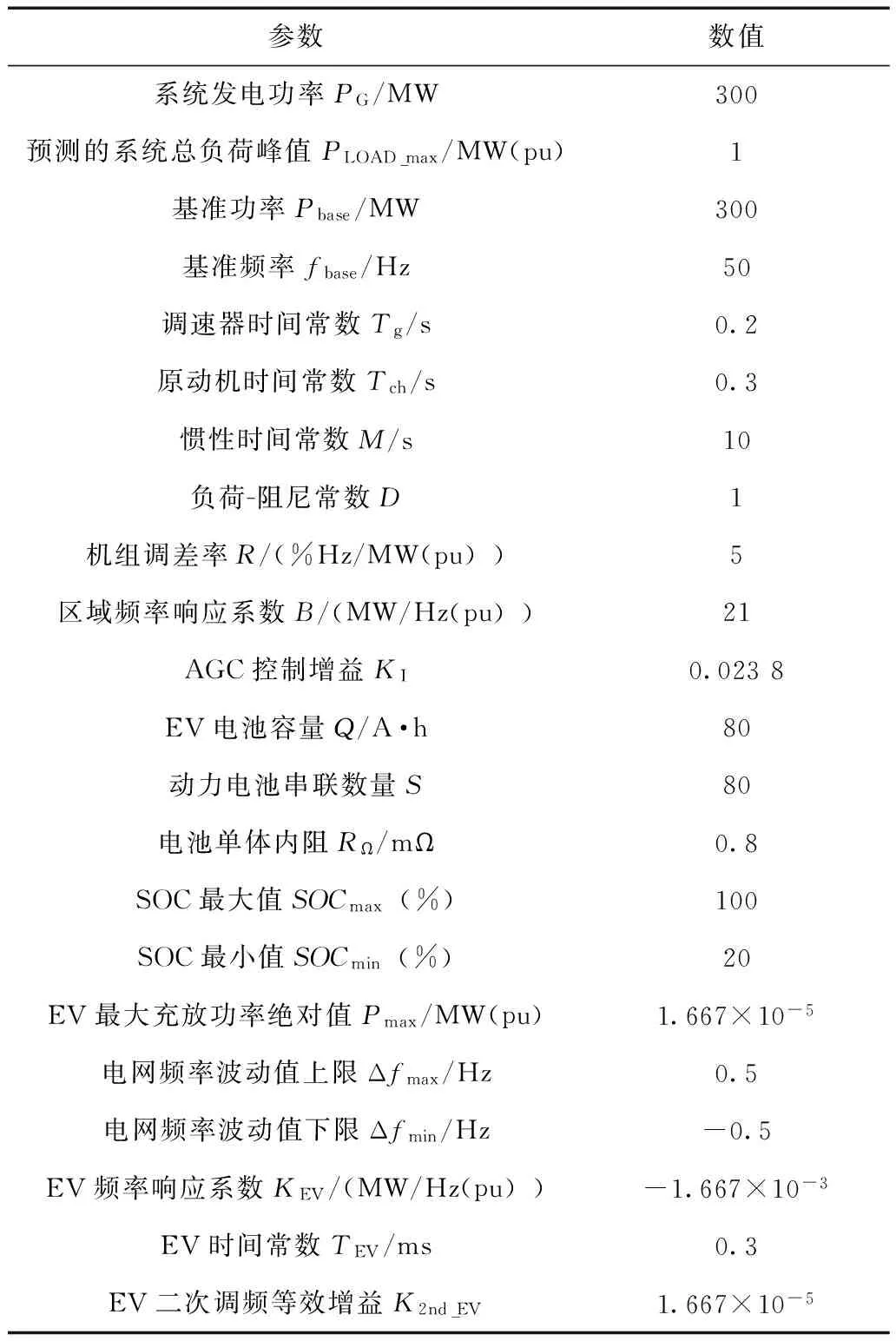
表2 电动汽车与电力系统频率控制的相关参数Tab.2 Parameters of EV and power system frequency control
参与电力系统频率调节控制的EV类型为纯电动汽车,动力电池为锰酸锂电池。充放电机连接单相220 V/50 Hz电源,充、放电效率均取87%。实际运行时SOC通过电池管理系统实时检测获得。
5.2 算例1:EV参与电力系统频率调节控制的动态特性分析
基于本文第3节电力系统频率调节控制基本模型及电动汽车辅助调频系统的模型,算例1设立了3个场景:S1无EV参与只由发电机组实现调频;S2 加入EV参与一次频率控制;S3加入EV参与一次和二次频率控制。比较了在负荷阶跃变化(系统负荷在1 s时突增15 MW,即0.05 MW(pu))下3个场景的系统动态响应以及对发电机组和电网的影响。场景S3移动储能参与一次和二次频率调节控制模型见附录图A1。
3个场景下系统频率的变化量如图6所示,其中场景S2、S3参与调节的电动汽车数量为10 000辆。S1场景下,系统负荷增加导致的频率下降仅由同步发电机一次、二次调频进行校正,在210 s时系统频率恢复额定值;S2场景下,在同步发电机一次、二次调频的基础上增加EV参与一次调频,系统频率在325 s时恢复额定值;S3场景下,增加EV参与一次和二次调频,在240 s时系统频率恢复额定值,与S1场景的恢复时间较接近。由图6a的前50 s放大图6b可以看出,3个场景下频率最大下降分别为0.16 Hz、0.084 Hz、0.084 Hz,可见EV辅助调频明显降低了系统的频率波动。

图6 算例1场景1、2、3下系统及单辆EV的动态响应Fig.6 Dynamic response of system and single EV of Scenario 1,2,and 3 in Case 1
3个场景下的ACE值如图6c所示。由图6可知,在S2、S3场景下,加入EV参与电力系统频率控制,相比只有同步发电机调频的场景S1均明显降低了系统的ACE值(ACE峰值约降低50%),这意味着发电机组爬坡出力会明显减少,从而降低机组的磨损。3个场景下发电机组的最大出力变化率分别为11.4 MW/min、8.1 MW/min和7.3 MW/min,在加入EV辅助调频后有明显降低,更好地满足了发电机机械与热应力的限制。
S2和S3场景下10 000辆EV参与频率调节时,单辆车调频出力情况如图6d所示。这两种场景下EV一次调频出力基本一致,场景S2二次调频由发电机组承担,场景S3二次调频出力由AGC机组和电动汽车按比例分担,稳态时单车出力为0.375 kW。
图7a、图7b分别为S2、S3场景下,辅助调频EV数量分别为1 000、10 000、20 000辆时的系统频率波动。可以看出:①参与调节的EV数量增加时,系统频率波动峰值降低;②辅助调频EV数量相同时,EV只参与一次调频,同EV参与一次和二次调频时的系统频率波动最大值是相等的,取决于EV频率响应系数和参与调节EV数量。

图7 算例1三个场景不同数量EV参与时的动态响应Fig.7 Dynamic response of Scenario 1,2,and 3 in Case 1 with different numbers of participated EV
图7c、图7d分别为S2、S3场景下,辅助调频EV数量分别为1 000、10 000、20 000辆时单辆电动汽车出力情况。可以看出:①随着参与调节的电动汽车数量增加,系统频率波动减少,EV参与一次调频的出力最大值同时减小,易知单辆EV出力与发电机组一次调频出力之比为-KEVR∶1;②随着参与调节的电动汽车数量增加,EV参与一次和二次调频的出力稳态值降低,易知单辆EV二次调频出力与发电机组二次调频出力之比为K2nd_EV∶BKI。
根据算例1上述分析与结果,可得到以下基本结论:
1)规模化电动汽车参与系统频率调整时,将明显减少系统频率波动和ACE,降低发电机组的最大出力变化率。
2)从控制角度,将EV一次调频视为比例环节,二次调频视为积分环节,根据比例积分控制的原理可知,|KEV|增大(或加入EV参与一次调频),比例作用增强,频率波动的最大值减小,系统恢复额定频率的调节时间变长;|K2nd_EV|增大(或在EV一次调频的基础上加入EV二次调频),积分作用增强,系统恢复额定频率的调节时间缩短。
3)参与频率调节的电动汽车数量增加时,系统频率波动峰值降低,单辆EV参与一次调频的出力最大值减小,参与一次和二次调频的出力稳态值降低。此外,如前文描述,电动汽车出力与发电机组一次、二次调频时出力分别按照其调频特性参数呈正比例分配。
5.3 算例2:计及车辆限制和用户需求的EV辅助调频控制
算例2的频率调节控制模型如附录图A2所示。系统负荷波动如图8a所示,由正态分布随机生成,波动幅值为0.05 MW(pu)。参与调节的电动汽车初始荷电状态SOC0=40%,用户设定离开时终止荷电状态SOCe=80%,单向V2G充电时间裕量ΔTU=0.5 h,电动汽车参与调频服务起始时刻tb为8∶00,用户设置调频及充电终止时刻te为20∶00,即电动汽车可参与电网调频控制的时间Ton=12 h。

图8 算例2无EV参与、3 000辆EV参与频率控制Fig.8 Frequency control in Case 2 with no participated EV or 3 000 participated EVs
系统在无电动汽车参与一次、二次频率控制,仅由发电机组调频时的频率波动如图8b所示,参与电网一次和二次频率调节控制的EV数量为3 000辆时,对应的系统频率波动如图8c所示。可以看出,加入EV参与系统频率一次和二次频率控制后,在可参与电网调频控制的时间内系统频率波动减少。以14∶35时刻为例,系统负荷波动值由0.036 2 MW(pu)降至-0.021 6 MW(pu),系统频率上升,无电动汽车参与一次、二次频率控制时系统频率波动为0.185 Hz,参与频率调节控制的EV数量为3 000辆时系统频率波动为0.145 Hz,当参与频率调节控制的EV数量增至10 000辆时(相关波形与3 000辆EV参与时类似,本文未给出)系统频率波动为0.096 Hz。仅由发电机组调频,无EV参与时全天频率波动的均方根值为0.017 5 Hz;3 000辆EV参与频率调节控制时全天频率波动的均方根值为0.016 6 Hz;10 000辆EV参与频率调节控制时全天频率波动的均方根值为0.015 7 Hz。
图8d~图8f分别为参与频率调节控制的EV数量为3 000辆时辅助调频的工作模式指令、SOC和单车充/放电功率。按照第4节所述控制策略,EV在开始参与调频后先工作于单向V2G模式,充电至SOC=50%,随后进入V2G工作模式,持续7小时20分30秒(即Ton-TU)后转入单向V2G模式充电至车辆离开时间。从图8中可看到在到达用户设置调频及充电终止时刻20∶00时,用户离开不再参与调节(出力为零),离开时终止SOC达到了用户设定值80%,此外整个起始时刻到终止时刻过程中,SOC均未出现超出车辆属性中最大、最小SOC限制的情况,从充/放电功率曲线可知未超出车辆属性中充/放电电流倍率限制,满足了车辆与用户的需求。
电动汽车储能参数具有杂散性,而本文所述的控制策略具有分散式控制的特点,每一辆EV均由其车载充放电机控制器根据自身参数制定其参与频率调节的控制策略,并控制充放电机执行。下面举例说明,附录图A3为系统中参与EV辅助调频的电动汽车用户设置参数不同时的简化模型。模型中假设有两种用户需求,第一种EV用户参与调节时电动汽车初始荷电状态SOC01=40%,设定离开时终止荷电状态SOCe1=80%,单向V2G充电时间裕量ΔTU1=0.5 h,参与调频服务起始时刻tb1为8∶00,用户设置调频及充电终止时刻te1为20∶00,EV数量为3 000辆;为说明策略对于满足EV用户个体需求的效果,第二种用户需求的EV数量为1辆,参与调节时初始荷电状态SOC02=35%,设定离开时终止荷电状态SOCe2=90%,单向V2G充电时间裕量ΔTU2=0.5 h,参与调频服务起始时刻tb2为7∶30,设置终止时刻te2为18∶53。两种用户电动汽车类型、动力电池参数、充放电机参数相同,如5.1节所述。
图9a为算例2在两种用户需求下的系统频率波动,由于增加1辆车调节能力变化不大,图9a与图8c基本一致。图9b~图9d分别为算例2在两种用户需求下的工作模式指令、SOC及单车充放电功率。可以看出,第一种用户从8∶00开始提供调频服务,当到达用户设置调频及充电终止时刻20∶00时,此类用户离开,不再参与调节(出力为零),SOC达到用户设定的80%;第二种用户从7∶30开始提供调频服务,当到达用户设置终止时刻18∶53时,此类用户离开,不再参与调节(出力为零),SOC达到用户设定的90%。同样,整个车辆参与调频过程中,两种用户SOC均未出现超出车辆属性中最大、最小SOC限制的情况,充/放电功率曲线说明未超出车辆属性中充/放电电流倍率限制,满足了所有EV用户的用车需求。

图9 算例2两种用户需求情况下的系统频率波动、工作模式指令、SOC及调频出力Fig.9 Frequency fluctuation,operating mode flag,SOC,and regulation power of single EV with two users’ demand settings in Case 2
根据算例2的上述分析与结果,可知计及车辆限制和用户需求的EV参与一次、二次频率调节的控制策略在降低系统频率波动的同时能够满足车辆与用户的需求,实现了EV用户参与调频的智能化与个性化。
6 结论
频率是决定供电质量的关键因素,也是反映电力系统安全稳定运行的重要指标。电动汽车推广后,作为分布广泛、数量庞大的移动储能装置辅助电力系统
频率调节控制,与传统调频机组相比,其对负荷波动响应更加迅速,能够降低传统机组的磨损,接入位置靠近负荷中心,输配电损耗小、一次性投资少,能量转换效率高。此外,不同于传统调频机组,电动汽车参与调频控制时不存在物理上的“调速器”、“调频器”,只通过在充放电机软件中嵌入程序模块,软件模拟“调速器”和“调频器”的功能,调节充放电机的充、放电状态和功率大小参与系统频率调节。本文介绍了一种集散式层次化的电动汽车辅助调频系统结构框架,阐述了系统的工作机理。基于电力系统频率调节控制基本动态模型,建立了包含V2G和单向V2G两种工作模式电动汽车参与电网一次、二次频率调节控制的模型,给出了一种确定电动汽车辅助调频参数的计算方法。在此基础上,针对相关研究较少考虑电动汽车车辆属性的特点,提出了计及车辆限制和用户需求的电动汽车参与电网一次、二次频率调节的控制策略,该策略在实现电动汽车辅助频率控制的同时,能够满足车辆用户用车时间和容量的个性化需求,同时避免荷电状态超限和充放电电流倍率过大对电池造成的不利影响。最后,通过两个算例对提出的电动汽车辅助调频系统的模型,以及计及车辆限制和用户需求的电动汽车辅助调频控制策略进行了研究分析,结果说明电动汽车参与电网频率调节控制可有效降低系统的频率波动,同时提出的策略也有效保证了车辆与用户的需求,从而验证了模型与策略的有效性。
电动汽车参与电网频率调节控制基于未来智能电网建设相对成熟、电动汽车广泛应用的情况,是国内外研究的前沿热点问题,随着相关技术的发展应用,本文的模型及控制策略可在基础条件具备时予以实现,电动汽车在完成与移动储能控制中心的信息交互后,通过已预先嵌入充放电机控制程序中的模型和控制策略即可控制充放电机功率,参与电网频率调节。
国外调频市场采用竞价机制,发电厂将机组爬坡率、可用时间以及价格等信息发送给电网调度控制中心参与电力市场,调频机组的收益取决于其备用时间和校正实际提供的电能,如果在合同规定时间内电厂不能提供服务将从经济上进行一定程度的处罚。电动汽车参与电网频率调节控制的经济激励措施可以借鉴这一模式,也是今后研究的一个重要方向。
附 录
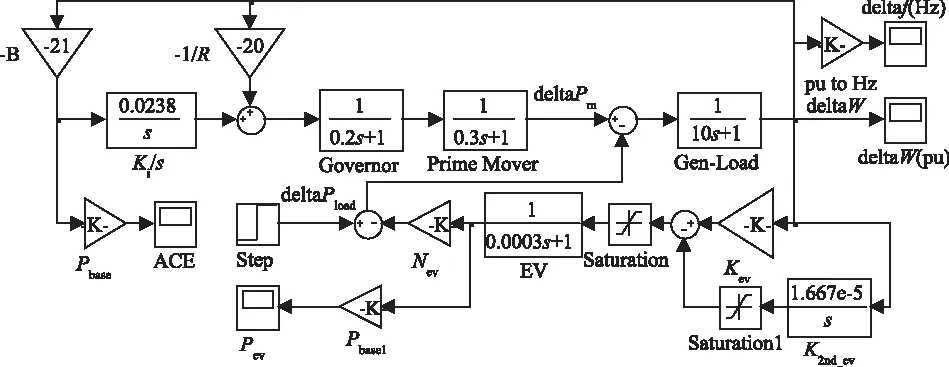
图A1 场景S3移动储能参与一次和二次频率调节控制模型Fig.A1 Control model of EVs participating in primary and secondary frequency regulation in Scenario 3
图A1在典型单区域电力系统模型基础上加入了移动储能参与一次、二次调频的模型,其中“Governor”和“Prime Mover”分别为调速器和原动机模型,“Gen-Load”为发电机惯性及负荷阻尼模型,模块“-1/R”、“-B”和“Ki/s”构成发电机组一次、二次调频模型,“deltaPload”为系统负荷波动,其余部分为图5所示的电动汽车参与一次、二次调频的模型。

图A2 算例2计及车辆限制和用户需求的电动汽车参与电网频率控制模型Fig.A2 Control model of EVs participating in frequency regulation considerging vehicles’ constraints and users’ demands in Case 2

图A3 算例2计及不同用户需求的电动汽车参与电网频率控制模型Fig.A3 Control model of EVs participating in frequency regulation considerging different users’ demands in Case 2
图A2、图A3在图A1模型的基础上,加入了电池模块和电动汽车调频控制模块模型,其中,“Battery”为电池模块,用于模拟电池组在一定充/放电功率下的SOC变化,其输入为单辆EV充/放电功率,输出为车辆电池SOC;“Controller”为电动汽车车载充放电机调频控制模块,其输入为电池SOC,该模块根据用户设置参数及电池基本参数,按照本文提出的控制方法输出EV调频方式的控制标志modeflag。
[1] 国民经济和社会发展第十二个五年规划纲要[EB/OL].[2014-11-04].http://www.gov.cn/2011lh/content_1825838_2.htm.
[2] 马玲玲,杨军,付聪,等.电动汽车充放电对电网影响研究综述[J].电力系统保护与控制,2013,41(3):140-148. Ma Lingling,Yang Jun,Fu Cong,et al.Review on impact of electric car charging and discharging on power grid[J].Power System Protection and Control,2013,41(3):140-148.
[3] 杨冰,王丽芳,廖承林.大规模电动汽车充电需求及影响因素[J].电工技术学报,2013,28(2):22-27. Yang Bing,Wang Lifang,Liao Chenglin.Research on power-charging demand of large-scale electric vehicles and its impacting factors[J].Transactions of China Electrotechnical Society,2013,28(2):22-27.
[4] Kempton W,Tomic′ J.Vehicle-to-grid power implementation:From stabilizing the grid to supporting large-scale renewable energy[J].Journal of Power Sources,2005,144(1):280-294.
[5] 刘晓飞,张千帆,崔淑梅.电动汽车V2G技术综述[J].电工技术学报,2012,27(2):121-127. Liu Xiaofei,Zhang Qianfan,Cui Shumei.Review of electric vehicle V2G technology[J].Transactions of China Electrotechnical Society,2012,27(2):121-127.
[6] Brooks A N.Vehicle-to-grid demonstration project:grid regulation ancillary service with a battery electric vehicle[R].AC Propulsion,2002.
[7] Kempton W,Tomic′ J.Vehicle-to-grid power fundamentals:calculating capacity and net revenue[J].Journal of Power Sources,2005,144(1):268-279.
[8] Tomic′ J,Kempton W.Using fleets of electric-drive vehicles for grid support[J].Journal of Power Sources,2007,168(2):459-468.
[9] Andersson S L,Elofsson A K,Galus M D,et al.Plug-in hybrid electric vehicles as regulating power providers:Case studies of Sweden and Germany[J].Energy Policy,2010,38(6):2751-2762.
[10]翁国庆,张有兵,戚军,等.多类型电动汽车电池集群参与微网储能的V2G可用容量评估[J].电工技术学报,2014,29(8):36-45. Weng Guoqing,Zhang Youbing,Qi Jun,et al.Evaluation for V2G available capacity of battery groups of electric vehicles as energy storage elements in microgrid[J].Transactions of China Electrotechnical Society,2014,29(8):36-45.
[11]黄媛,刘俊勇,陈井锐,等.计及电动汽车入网的负荷频率控制[J].电力系统自动化,2012,36(9):24-28. Huang Yuan,Liu Junyong,Chen Jingrui,et al.Load frequency control considering vehicle to grid[J].Automation of Electric Power Systems,2012,36(9):24-28.
[12]张立岩,赵俊华,文福拴,等.基于线性矩阵不等式的电动汽车网络化鲁棒控制[J].电力系统自动化,2013,37(20):54-62. Zhang Liyan,Zhao Junhua,Wen Fushuan,et al.Networked robust control of electric vehicles based on linear matrix inequalities[J].Automation of Electric Power Systems,2013,37(20):54-62.
[13]张谦,周林,周雒维,等.计及电动汽车充放电静态频率特性的负荷频率控制[J].电力系统自动化,2014,38(16):74-80. Zhang Qian,Zhou Lin,Zhou Luowei,et al.Load frequency control considering charging and discharging static frequency characteristics of electric vehicles[J].Automation of Electric Power Systems,2014,38(16):74-80.
[14]Mu Y F,Wu J Z,Ekanayake J,et al.Primary frequency response from electric vehicles in the Great Britain power system[J].IEEE Transactions on Smart Grid,2013,4(2):1142-1150.
[15]Ota Y,Taniguchi H,Nakajima T,et al.Autonomous distributed V2G (vehicle-to-grid) satisfying scheduled charging[J].IEEE Transactions on Smart Grid,2012,3(1):559-564.
[16]Liu H,Hu Z,Song Y H,et al.Decentralized vehicle-to-grid control for primary frequency regulation considering charging demands[J].IEEE Transactions on Power Systems,2013,28(3):3480-3489.
[17]Galus M D,Koch S,Andersson G.Provision of load frequency control by PHEVs,controllable loads,and a cogeneration unit[J].IEEE Transactions on Industrial Electronics,2011,58(10):4568-4582.
[18]Masuta T,Yokoyama A.Supplementary load frequency control by use of a number of both electric vehicles and heat pump water heaters[J].IEEE Transactions on Smart Grid,2012,3(3):1253-1262.
[19]高翔.现代电网频率控制应用技术[M].北京:中国电力出版社,2010.
[20]Han Sekyuang,Han Soohee,Sezaki K.Development of an optimal vehicle-to-grid aggregator for frequency regulation[J].IEEE Transactions on Smart Grid,2010,1(1):65-72.
[21]田文奇,和敬涵,姜久春,等.电动汽车换电站有序充电调度策略研究[J].电力系统保护与控制,2012,40(21):114-119. Tian Wenqi,He Jinghan,Jiang Jiuchun,et al.Research on dispatching strategy for coordinated charging of electric vehicle battery swapping station[J].Power System Protection and Control,2012,40(21):114-119.
[22]杨玉青,苏粟,姜久春,等.改善配电网负荷特性的充电站有序充电优化策略[J].电力系统保护与控制,2014,42(7):60-66. Yang Yuqing,Su Su,Jiang Jiuchun,et al.Dynamic optimizing strategy of coordinated charging to improve the load characteristics of distribution system[J].Power System Protection and Control,2014,42(7):60-66.
[23]Prabha K.电力系统稳定与控制[M].北京:中国电力出版社,2002.
[24]鲍谚,姜久春,张维戈,等.电动汽车移动储能系统模型及控制策略研究[J].电力系统自动化.2012,36(22):36-43. Bao Yan,Jiang Jiuchun,Zhang Weige,et al.Model and control strategy of electric vehicle mobile energy storage system[J].Automation of Electric Power Systems,2012,36(22):36-43.
Research on the Control Strategy of Electric Vehicle Mobile Energy Storage in Ancillary Frequency Regulation
BaoYan1,2JiaLimin2JiangJiuchun1ZhangWeige1
(1.National Active Distribution Network Technology Research Center Beijing Jiaotong University Beijing 100044 China 2.School of Traffic and Transportation Beijing Jiaotong University Beijing 100044 China)
Numerous EVs have been integrated in the grid,which will not only act as controllable loads,but also as mobile energy storage systems to supply ancillaryservice and support.The advantages of EVs participated frequency control are analyzed in this paper at first.A framework and its operation principle of mobile energy storage assisted frequency regulation are then introduced.Based on the basic dynamic model of frequency regulation in the power system,the models of EVs participating in the primary and secondary frequency regulation are established.Based on this,the control strategy considering the vehicle constraints and users’ demands,which have been rarely discussed by other researchers,is proposed here.This strategy can satisfy the individual demand of users’use time and capacity,avoid exceeding the state of charge (SOC)limit or damaging the battery caused by the large charge-discharge current.The proposed models and control strategy are then implemented in two case studies,and their effectiveness is verified finally.
Electric vehicle,ancillary frequency regulation,vehicle constraint,user’s demand,control strategy
国家国际科技合作专项资助项目(2013DFA60930)。
2014-11-04 改稿日期2015-02-25
TM76;U469.72
鲍 谚 男,1982年生,博士,讲师,研究方向为电动汽车与电网互动技术、智能电网与新能源发电技术。(通信作者)
贾利民 男,1963年生,博士,教授,博士生导师,研究方向为控制科学与工程、智能自动化。
猜你喜欢
能源工程(2021年5期)2021-11-20 05:50:42
新能源汽车供能技术(2021年1期)2021-10-14 08:59:48
煤气与热力(2021年6期)2021-07-28 07:21:24
电子制作(2019年23期)2019-02-23 13:21:36
通信电源技术(2018年3期)2018-06-26 06:33:42
能源(2017年12期)2018-01-31 01:42:59
电源技术(2016年2期)2016-02-27 09:05:08
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
电源技术(2015年5期)2015-08-22 11:18:02
