基于MATLAB的双馈型风力发电机组仿真系统研究*
2015-04-16 07:11王旭
新技术新工艺 2015年7期
王 旭
(昆明冶金高等专科学校,云南 昆明 650000)
随着我国风力发电技术的不断发展,建造了很多大规模的风电场[1],机型也逐渐向双馈型和直驱型风力发电机组发展,尤其是双馈型风力发电机组在实际应用中比较重要。目前,我国风力发电的专业技术人员比较缺乏,为了培养更多风力发电方面的技术人才,本文以MATLAB软件为平台,设计了双馈型风力发电机组仿真系统,期望为技术人才培训提供更加宽广的平台。
1 双馈型风力发电机组的组成
目前,在国内外风电市场上,双馈型风力发电机组(DFIG)成为主流机型,主要由传动系统、风力机、双PWM变频器、双馈异步发电机和塔架及机舱等构成。它具有变频器额定容量小和风能利用率高等优点。风力机通过风获得能量,将其转化成机械能,传动系统对这些能量进行传递,发电机接收并利用这些能量,将其转化成电能,传输至电网[2]。发电机的定子和电网直接相连,转子通过双PWM变频器和电网相连。靠近转子的变频器被称为转子侧变频器,网侧变频器和电网直接相连。双馈型风力发电机组的结构图如图1所示。

图1 双馈型风力发电机组的结构图
双馈型风力发电机组的转速可以通过风速进行调整,实现超同步、同步及次同步发电运行。机组通过双PWM变频器控制实现变速恒频运行。通过控制转子侧变频器,控制转子励磁电流幅值、相角及频率,最终达到调节风力发电机组的输出功率和转速的目的。网侧变频器为转子侧变频器提供充足能量,通过对其进行控制,能使直流环节母线电压保持稳定[3]。
2 双馈型风力发电机组控制模型
2.1 双馈型风力发电机组的轴系模型
双馈型风力发电机组的轴系模型将发电机等效为一个质量块,齿轮箱和风力机等效为另一个质量块,2个质量块的轴系模型如下:
(1)
(2)
(3)
式中,ωw t是风力机转子转速,ωr是发电机的转子转速;Tw t是风力机机械转矩,Te是发电机电磁转矩;Hw t是风力机惯性时间常数,Hg是发电机惯性时间常数;Ds是阻尼系数;Ks是轴的刚度系数;ωs是同步转速,θs是2个质量块之间的相对角位移。
2.2 变桨距控制系统模型
在变桨距系统中,伺服电动机为直流电动机,驱动器对直流电动机的输出转矩进行控制。在建模时,对驱动器和直流电动机进行等效,将其看成伺服电动机(内部含有转矩闭环控制),等效之后,由于转矩信号对伺服电动机的转速产生影响,所以应对转矩信号进行控制。等效伺服电动机的数学模型如下:
(4)
式中,T是直流电动机的输出转矩;Tmax是直流电动机最大转速对应的转矩输出值;Tnmax是直流电动机最小转速对应的转矩输出值;nmax是直流电动机最大转速;n是直流电动机转速。
变桨距系统传动部分的数学模型建立时,将伺服电动机和减速机转子的转动惯量一起等效如下:

(5)
式中,JPD是伺服电动机转子与减速机的总转动惯量;β是叶片桨距角;Te是伺服电动机的输出转矩;JRB是叶片转动惯量;βe是伺服电动机转子的转动角度;TZB是叶片上变桨力矩;k是等效刚度系数;Tm是回转支承内环大齿上减速机小齿轮的作用转矩;N=NPD·NPB,其中NPB是减速机小齿轮与回转支承内环大齿轮的半径比,NPD是减速机的传动比;D是等效阻尼系数。
变桨系统的控制系统主要包括速度控制器、转速控制器及位置控制器等各种控制器,风力机转速ω的实际值和参考值ωref之间存在差值,转速控制器根据此差值产生叶片变桨角度参考值βref;位置控制器根据实际桨距角β与参考值βref的差值生成变桨速率参考值νref;实际变桨速率ν与变桨速率参考值νref存在差值,根据此差值速度控制器产生伺服电动机的转矩信号,以转矩信号为驱动力,伺服电动机驱动叶片和减速机使桨距角发生改变。变桨距控制系统控制框图如图2所示。
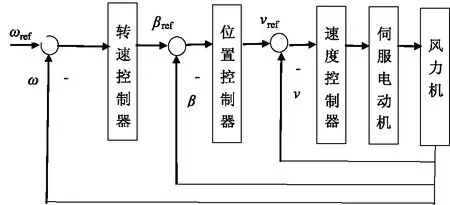
图2 变桨距控制系统控制框图
2.3 转子侧变流器控制系统
转子侧电流的控制是通过转子侧变流器控制系统对转子侧电压d、q轴分量进行控制,最终实现对风力发电机组输出的无功功率和有功功率的解耦控制[4]。

(6)

图3 转子侧变流器控制有功功率框图

图4 转子侧变流器控制无功功率框图
(7)
式6和式7中,uDC是变流器直流侧电压;urq_crl和urd_crl是变流器控制变量脉冲调制系数;isd是定子电流d轴分量;isq是定子电流q轴分量;ird是转子电流d轴分量;irq是转子电流q轴分量;Lr是转子自感;Lm是定、转子互感;ωs是同步速;Rr是转子电阻;s是转差率。
2.4 电网侧控制模型
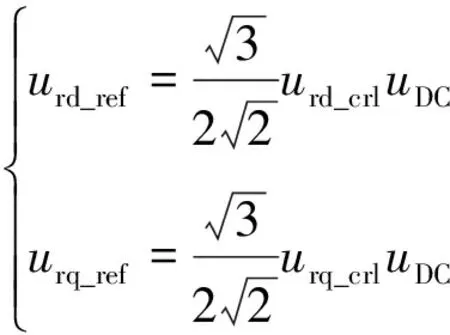
电网侧变流器控制系统有2方面作用:1)控制转子侧并网无功功率的大小和方向;2)控制变流器直流侧电压维持在额定值。电流控制模块是电网侧控制系统的核心部分,电网侧相应信号传输到同构测量模块,经坐标转换后将其传输到电流控制模块,再经坐标反变换输出,最终对电网侧逆变器进行控制[5]。 电网侧变流器控制也由解耦的2级闭环控制组成,如图5和图6所示。变流器和直流电压发出的无功功率由外环进行控制,产生电网侧变流器的参考控制电流igcd_ref和igcq_ref。由于控制电网侧变流器和主网的无功功率不进行交换,因此可直接设置igcq_ref=0,图6中没有外环无功控制部分。ugcq_com与ugcd_com(补偿电压)、ugcd_ref与ugcq_ref(参考控制电压的d、q轴分量)、ugcd_ref与ugcq_ref(脉冲调制系数),可分别按图5、图6、式8和式9求得。

图5 电网侧变流器控制直流电压框图

图6 电网侧变流器控制转子侧并网无功功率框图
(8)

(9)
式中,Lci是转子侧耦合电感器电感值;Rci是转子侧耦合电感器的电阻值;usq是定子电压的q轴分量;usd是定子电压的d轴分量。
3 仿真系统分析
仿真系统的主要作用就是通过MATLAB软件平台得到双馈型风力发电机组的控制模型,对发电机的运行过程进行分析,得到相关数据,确保机组运行的稳定性。由于仿真系统的模型运行需要在主计算机中完成,所以要求该计算的配置应较高,以保证系统的仿真结果。由于网络设备主要是实现主计算机和微机之间数据的实时传输,微机主要完成监控主计算机上仿真系统的运行界面的访问,所以一般配置即可。MATLAB软件负责仿真系统底层仿真模型的建立和运行,只需在主计算机上安装即可。
本文设计了双馈型风力发电机组的仿真模型,通过设置相应的风电机组运行参数,得到不同的运行结果,并对整个仿真过程进行控制。风速刚开始为8 m/s,在t=5 s时风速突然增大至14 m/s。监测风力发电机组的转速、风速和桨矩角仿真图如图7所示。

图7 发电机组的转速、风速和桨矩角仿真图
4 结语
本文基于MATLAB软件平台,设计了双馈型风力发电机组各个组成部分的仿真模型,并在计算机上实现仿真系统。在实际应用中,应对系统加强维护,及时完善系统功能,对于不足之后尽快改进。由于我国的风电技术发展较快,而专业的技术人员有所欠缺,研究仿真系统可以满足人员培养的需求,促进我国风电技术的快速发展。
[1] 张丽英,叶廷路,辛耀中,等.大规模风电接入电网的相关问题及措施[J].中国电机工程学报,2010,30(25):1-9.
[2] 范高峰,赵海翔,戴慧珠.大规模风电对电力系统的影响和应对策略[J].电网与清洁能源,2008,24(1):44-48.
[3] 林今,孙元章,李国杰,等.采用变速恒频机组的风电场有功功率波动对系统节点频率影响的动态评估模型[J].电力自动化设备,2010,30(2):14-18,32.
[4] 郝正航.双馈风电机组的暂态行为及其对电力系统稳定性影响[D].天津:天津大学,2011.
[5] 刘其辉,李万杰.双馈风力发电及变流控制的数/模混合仿真方案分析与设计[J].电力系统自动化,2011,35(1):83-86,95.
*云南省教育厅科学研究基金资助项目(2013Y086)
猜你喜欢
大电机技术(2022年3期)2022-08-06
湖南电力(2022年3期)2022-07-07
大电机技术(2022年1期)2022-03-16
防爆电机(2021年6期)2022-01-17
哈尔滨轴承(2020年3期)2021-01-26
通信电源技术(2020年17期)2020-12-28
哈尔滨轴承(2020年1期)2020-11-03
电子制作(2019年10期)2019-06-17
通信电源技术(2018年5期)2018-08-23
通信电源技术(2016年1期)2016-04-16