水声声压校准用位移平台及控制系统的设计
2015-04-16 07:14曾显波李志勇
新技术新工艺 2015年7期
曾显波,李志勇
(1.青岛港湾职业技术学院,山东 青岛 266404;2.山东科技大学,山东 青岛 266590)
在位移装置的设计中,其灵活性和定位精度是设计中的重点,也是难点。本文介绍一种自主研制的直线与回转位移装置,用于进行水声声压校准时搭载测试设备的位移平台。汤斌等设计了2种升降回转定位装置,分别为框架式结构定位装置和中空柱式结构定位装置,并从工程角度分析了2种结构的各自特点[1]。张金钟等介绍了人工岛格型钢板桩回转与升降装置的结构设计及其工作原理,并应用有限元方法对其在施工过程中遇到的各种工况进行了受力分析[2]。林靖等把编码器应用到湖上平台回转升降平移装置中,整个设计系统以PLC为控制核心,利用增量型光电编码器对位置进行实时监测,得到了理想的控制效果[3]。之前的研究大部分只限于升降回转位移装置中部分的设计,本文在参考上述设计方案的同时,系统地介绍了水声声压校准用位移平台装置的整体设计。此外,在K. Mateti等研究机翼旋转和升降装置中,减振效果明显[4];R. L. Barnett等研究的关于汽车电梯的旋转机构中存在的隐患也给本设计提供了很大的参考[5]。
1 位移平台装置的整体设计
1.1 功能要求和技术指标
位移平台装置的功能要求是研制一套位移装置,该装置可控制被测试声结构在水中的放置方位,同时配备水声换能器基本参数测试软件,可控制Y轴和Z轴2个方向及旋转角度的自动定位(X轴方向采用手动控制),并记录这些信息。其中,要求Z轴下端法兰盘承重载荷20 kg。
位移平台主要技术指标如下。
1)运动范围(见表1)。

表1 运动范围
2)测量精度和控制精度(见表2)。
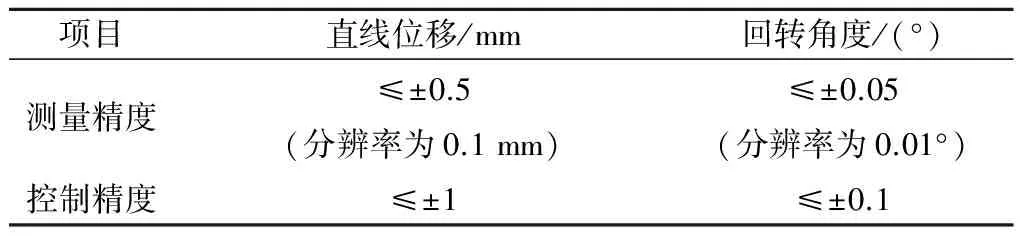
表2 测量精度和控制精度
3)运动速度(见表3)。

表3 运动速度要求
4)其他要求。
使用环境要求温度为0~40 ℃;湿度为<90%RH;电源为220 VAC、50 Hz。
1.2 机电控制系统方案设计
控制系统主要由信捷PLC XCC-32T、THA62-MT(触摸屏)和自行开发的接口、细分电路组成,控制系统的基本组成结构图如图1所示。
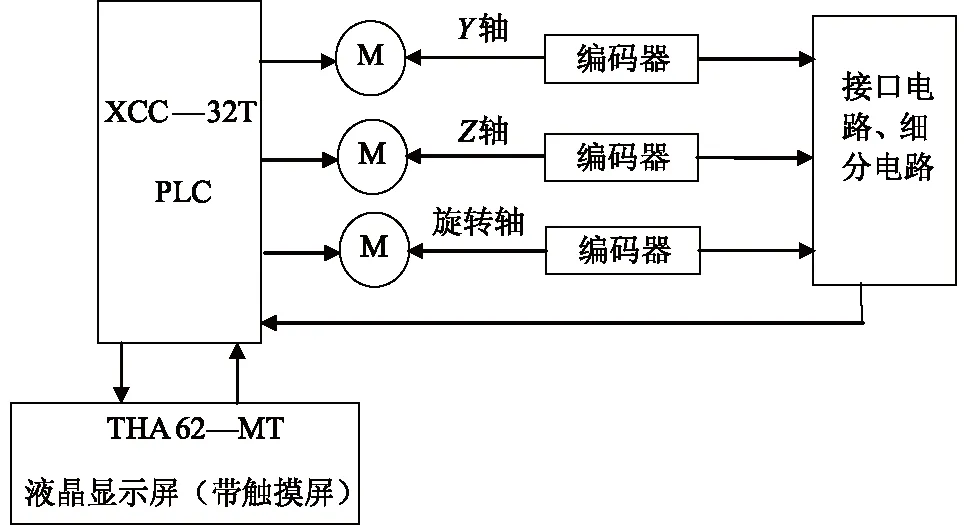
图1 控制系统基本结构图
位移平台共4个轴,对其中3个轴(除X轴)进行电控,即对平台的Y轴、Z轴和旋转轴用PLC进行控制。控制方式采用手控点动方式、手控连续方式和计算机程序控制方式。PLC和自行设计的接口、细分电路配合完成对位移传感器的数据读取,PLC的RS485提供计算机远程接口,液晶显示器显示各项位移数据,并接受操作员的操作指令。上述坐标轴能分别实现X、Y、Z和θ方向的手动定位,且各个方向的运动相互独立,互不干扰。
1.3 机械系统设计
机械系统主要由有一定跨度距离的可做X向滑动的平台底座组成,平台底座上设计安装Y向滑台,实现Y向运动。Y向滑台上设计安装升降回转装置,可以带动连接轴做垂直和回转运动。每个运动自由度均在动力输入端安装手轮,以实现手动移动,每个运动轴侧都安装有标线尺或刻度盘作为位置标识。机械结构图如图2所示。
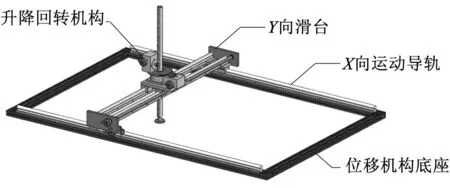
图2 位移平台机械结构图
整个位移平台是一个独立的装置,工作时可将平台底座整体移动,直接放置在水槽上方即可。Z轴下端法兰盘搭载被测试结构件。X方向、Y方向和Z方向运动平台均采用铝合金框架的直线单元结构,丝杠与导轨等部件均封闭在框架之内,铝型材表面阳极化防锈,整体外形美观、大方。
机械系统设计中,位移平台的升降回转机构应满足结构紧凑和升降自锁等要求,是应重点考虑的部位。本文选用自行制作蜗轮蜗杆方案(也可采购整体丝杠升降机),用以实现自锁功能。升降回转机构安装在大齿轮齿盘上,升降杆为研磨级不锈钢空心厚壁光轴,用精密不锈钢直线轴承作升降导向,如图3所示。升降杆于一侧表面刻制齿条,通过齿轮齿条传动方式实现升降运动。齿条背面开方槽,可用来导向,并安装升降标尺和限位开关。
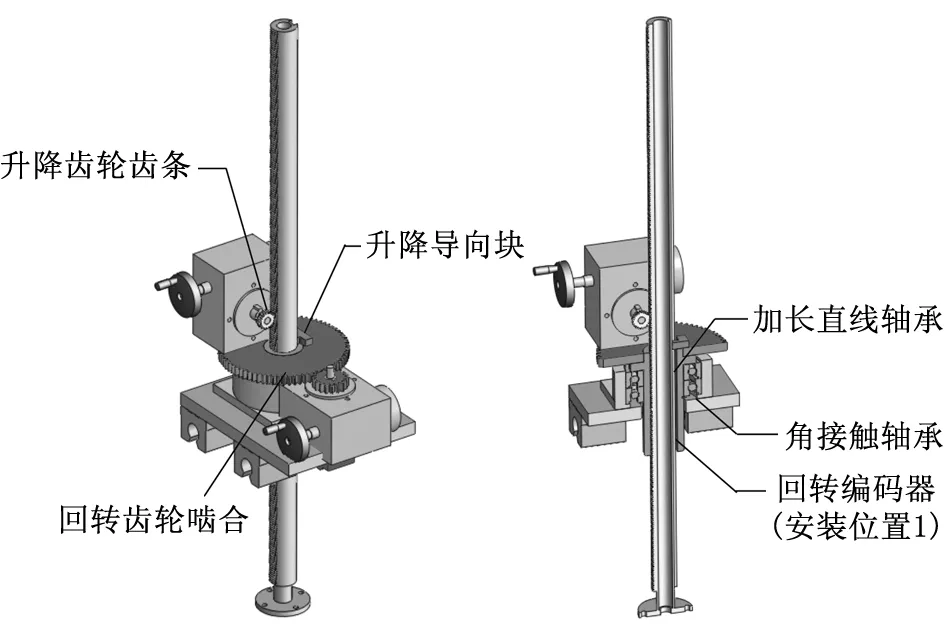
a)结构图 b)结构剖视图图3 升降回转机构结构图
2 位移平台运动控制基本工作原理
位移平台的运动基本工作原理如下:PLC根据操作人员的指令和相应的测量系统的位移值,计算出步进电动机的转动量和转动方向,发出相应的运动指令,控制步进电动机通过减速器和传动机构带动相应的部件进行直线或旋转运动,PLC根据旋转编码器实时位移测量结果判断位移是否完成。整个位移过程是通过闭环控制完成的,当实际位移量与期望位移量的误差小于系统设计指标时,运动过程停止。
PC机控制端可根据要求编写控制软件。PC机与控制仪通过串行接口(可以选择RS232或RS485)进行通信,控制仪接收PC机的通信命令,根据PC机的命令控制各轴的运动,将各轴的坐标值以及运动状态发送给PC机,并实时显示。电气器件及控制示意图如图4所示。
2.1 机电系统工作原理
该运动机构的运动均由步进电动机驱动。采用在步进电动机尾部安装编码器的方案。其中,Z向和θ向步进电动机输出端接蜗轮蜗杆减速机,以提高驱动分辨力;同时具有锁定功能,以确保每一个位移机构在掉电时能自锁。
Y方向和Z方向的直线位移是通过步进电动机带动丝杠实现,Z方向升降直线运动通过减速机带动丝杠实现,旋转运动通过减速机来实现。同时,在运动的上、下限处设置限位保护。限位保护可发出限位控制信号,该信号禁止在该方向上的运动;但仍可进行反方向的运动,以便脱离限位保护状态。
2.2 测量系统工作原理
直线运动部分的测量系统是将编码器固定在丝杠一端,当丝杠旋转时,编码器根据旋转量的大小和方向输出相应的正交脉冲信号,通过丝杠旋转的圈数和脉冲个数可以计算出相对位移量。旋转运动部分的测量系统是将旋转编码器固定在转台上,当转台旋转时,编码器读数头根据旋转位移量的大小和方向输出相应的正交脉冲信号。
接口电路将读数头输入信号转换成TTL电平信号,细分电路根据正交脉冲信号的相位判断读数头运动方向,并产生细分脉冲信号和方向信号,PLC计数器模块根据脉冲信号和方向信号对脉冲进行计数,从而获得到当前位移量。
测量系统采用旋转编码器,安装在各个自由度的最后一级,以确保测量及校准精度。测量精度要求见表4。
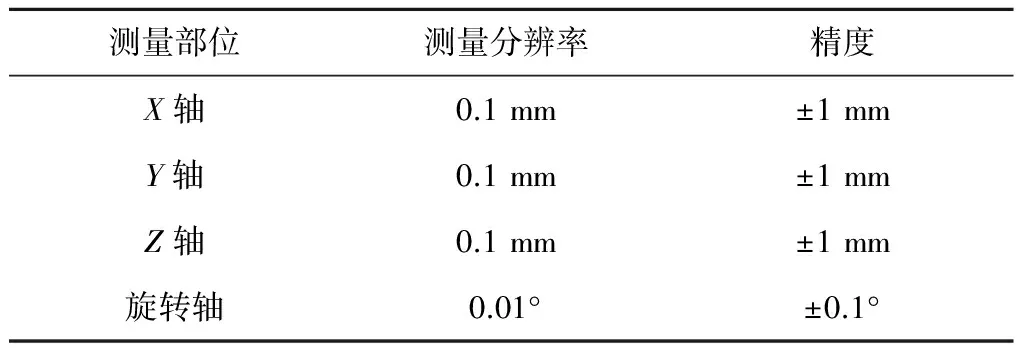
表4 测量精度要求
3 设计计算
3.1 Y向参数计算
3.1.1Y方向速度计算
丝杠直径为20 mm,导程为5 mm,Y向移动速度要求为1 000 mm/min。需要电动机转速为1 000/4=250 r/min,所选步进电动机转速约为600 r/min,满足要求。
3.1.2Y方向转矩计算
梯形丝杠的效率为:
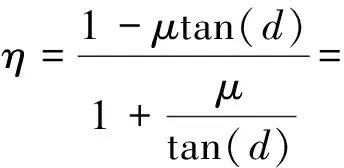
(1)
式中,d为丝杠螺纹升角;μ为滑动摩擦因数,钢与黄铜的滑动摩擦系数为0.21。
所需转矩为:
(2)
式中,Fa为负载36 kg情况下所需克服的摩擦力,Fa=μ2N=0.05×36×10=18 (N);s为安全系数,此处取2;R为丝杠半径。
选用57BYGH系列混合式步进电动机,转矩最大为1.5 N·m,满足要求。
3.1.3Y方向定位精度要求
Y方向定位精度要求为±1 mm,编码器选用标准2000P/R产品,能达到的分辨率为5/2 000=0.002 5 mm,因此远远满足要求。
3.2 Z向参数计算
3.2.1Z方向速度计算
Z向移动采用齿轮齿条。齿合方式,Z向移动速度要求为1 000 mm/min。所选蜗轮蜗杆减速机减速比10∶1,所需电动机转速约为100 r/min,所选步进电动机转速约为600 r/min,满足要求。
3.2.2Z方向转矩计算
(3)
式中,η为蜗轮蜗杆减速机的效率,η取0.6;Fb为负载与丝杠自重在减速机传动情况下需克服的磨擦力。
选用57BYGH系列混合式步进电动机,转矩最大为1.5 N·m,满足要求。
3.2.3Z方向定位精度要求
Z方向定位精度要求为±1 mm,编码器选用标准2000P/R产品,能达到的分辨率为20/(2 000×10)=0.001 mm,满足要求。
3.3 回转轴θ方向参数计算
3.3.1θ方向速度计算
齿轮减速比为5∶1,θ方向转动要求1 r/min。所选蜗轮蜗杆减速机减速比为20∶1,需要电动机转速为20×5=100 (r/min),所选步进电动机转速约为600 r/min,基本满足要求。
3.3.2θ方向转矩计算
(4)
式中,η为蜗轮蜗杆减速机的效率,η取0.6;Fc为负载以及丝杠和减速机自重在减速机传动情况下需克服的磨擦力。
选用57BYGH系列混合式步进电动机,转矩最大为1.5 N·m,满足要求。
3.3.3θ方向定位精度要求
θ方向定位精度要求为±0.1°,编码器选用标准2000P/R产品,安装在蜗轮蜗杆减速机输出轴上,能达到的分辨率为:360°/(5×2 000)=0.036°,满足要求。
4 不确定度的分配及评估
4.1 Z方向位移精度计算
选择传动链级数多的Z方向传动进行位移精度计算。选用57BYGH系列混合式步进电动机搭配PN型减速机,减速比为10∶1,输出转矩为1.5 N·m(输入电压单相110 V),步进电动机编码器最大细分数为2000P/R,分辨率为0.05°/脉冲,则:

PN型减速机齿隙为0.034°,角度传动误差为0.1°。
PN型减速机对于Z方向直线位移产生的定位误差为:
Z方向减速机定位精度=
梯形丝杠长600 mm,丝杠精度为±0.15/300 mm,丝杠累积精度=(600×0.15)/300=±0.3 mm,安装精度按±0.2 mm计算,因此,Z方向位移总精度=电动机控制精度+减速机定位精度+丝杠精度+装配精度=0.000 25+0.001 86+0.3+0.2≈0.502 mm,满足Z方向位移定位精度(±1 mm)的要求。
4.2 旋转定位精度
旋转定位精度要求为±0.1°。旋转运动由安装在升降机构上的电动机提供驱动力,测量分辨率能达到0.01°。进一步的精确定位由弹性万向滚珠的安装精度(±0.1 mm)、旋转平台凹槽的加工精度(±0.05°)与装配精度(±0.1 mm)等来保证。
5 结语
本文详细介绍了一种高频水声声压校准时搭载测试设备的位移平台的设计,该装置主要由1套位移平台和1台控制仪组成,位移平台根据实际需要可增加Y向滑台数量。位移平台可实现沿长轴方向的2根导轨灵活移动,采用编码器进行直线位移测量和旋转位移测量,并通过计算机控制系统和步进电动机对各运动部件的位移进行控制;同时,对其机电系统和测量系统的工作原理做了相应的介绍,最终通过计算验证了设计的可行性。
[1] 汤斌,王文健, 王华.两种升降回转定位装置的设计[J].计测技术, 2012(3):30-32.
[2] 张金钟,熊威,刘志鹏,等. 港珠澳大桥人工岛格型钢板桩工程支撑回转与升降装置结构设计[J].中国水运(下半月), 2014(6): 259-264.
[3] 林靖,江伟杰, 林峰. 编码器在湖上平台回转升降平移装置中的应用[J].传感器与微系统, 2010(12): 137-140.
[4] Mateti K, Byrne-Dugan R A, Tadigadapa S A, et al. Wing rotation and lift modeling and measurement in SUEX flapping wing mechanisms[C]//ASME 2012 Conference on Smart Materials, Adaptive Structures and Intelligent Systems. New York: American Society of Mechanical Engineers, 2012:591-599.
[5] Barnett R L, Glauber J B. Automotive lifts: unrestrained vs. restrained swing arms[C]//ASME 2009 International Mechanical Engineering Congress and Exposition. New York: American Society of Mechanical Engineers, 2009:373-387.
猜你喜欢
山东冶金(2022年1期)2022-04-19
制造技术与机床(2019年11期)2019-12-04
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2019年1期)2019-01-14
中国金属通报(2019年5期)2019-01-03
制造技术与机床(2018年10期)2018-10-13
制造技术与机床(2017年8期)2017-11-27
雷达学报(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01