
基于PAM和MRD的新型六维宽频隔振系统及其特性
2015-04-16 07:15,
液压与气动 2015年12期
,
(河南科技大学 机电工程学院, 河南 洛阳 471003)
引言
军用车辆、舰艇、飞机等经常处于路况颠簸、海面风浪拍击、气流袭扰、炸弹袭击等恶劣环境中,极易导致车载/舰载/机载精密设备受到三维平移及三维旋转方向的强烈振动,然而这些精密设备只有在振动极其微弱甚至没有振动的环境中才能正常工作,振动和冲击稍大或稍多一些就容易导致设备无法工作,甚至失效。因此要保障这些精密设备的可靠运行及其生命力,就必须进行六维宽频隔振。
六维隔振系统容易产生刚度耦合、阻尼耦合,这给刚度阻尼的设计带来了困难,其次系统需要支撑一定的载荷,但系统的变形范围有限,因此系统刚度不能无限减小,从而阻碍了隔振频率的降低,除此以外,刚度和阻尼不易调节,大多数隔振材料或隔振器的刚度和阻尼不能随隔振频率的变化而改变,这就限制了系统的宽频隔振能力。
针对六维隔振很多学者做了卓有成效的研究,Wada等[1]利用立方构型的Stewart机构实现了解耦,并采用主动控制方法实现了高精度的振动隔离和抑制。Thayer和Campbell等[2]在此基础上对其设计进行了改进,增大了系统可控制的振动幅度。张春良、梅德庆等[3]提出了一种以空气弹簧为被动隔振元件、超磁致伸缩致动器为主动隔振元件的微制造平台六自由度隔振系统, 通过主动控制方式实现了高性能隔振。杨庆俊等[4]提出了一种能实现卫星六自由度隔振的气动八作动器隔振平台,并进行了主动控制研究。石奇端、马履中等[5]在减振装置中采用六自由度并联机构作为基体,在原动件处辅以可控弹簧阻尼系统,较好地解决了多自由度减振问题。李坤全[6]提出了一种基于6-RSS并联机构的六维减振系统,并利用主动控制方法提高隔振能力。
本研究则提出了一种基于气动肌肉和磁流变阻尼器的六维宽频隔振系统,该系统可实现刚度阻尼的解耦,可利用气动肌肉、磁流变阻尼器实现刚度、阻尼的调节,能通过改变机构参数大幅降低支撑频率。
1 六维隔振系统
图1为处于工作平衡位置时的六维隔振系统,基座上固定有3个按圆周均布的基架,在基架与中间悬架之间通过球铰并联9个气动肌肉和6个磁流变阻尼器,在中间悬架与载荷支撑平台之间通过球铰并联6个气动肌肉和3个磁流变阻尼器。气动肌肉的刚度可通过调节进气压力进行调节,磁流变阻尼器的阻尼参数可通过调节输入电流进行调节,整个机构是全对称的。
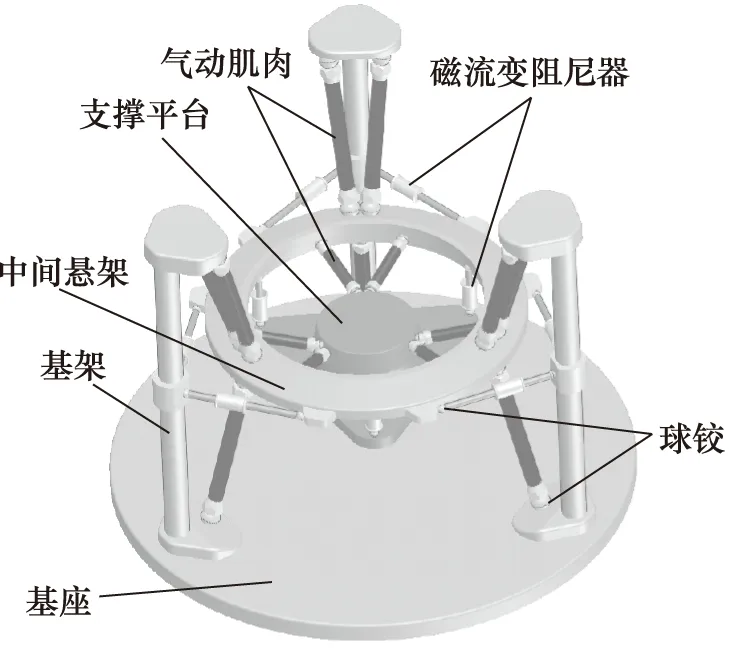
图1 六维隔振系统外观图
1.1 气动肌肉并联设计
气动肌肉并联机构主要为载荷/支撑平台提供恢复力和支撑力,处于工作平衡位置时,其机构如图2所示,该机构是全对称的。其中,点B1、B2、B3在半径为R的圆周上均布,点B4、B5、B6在半径为r的圆周上均布,弧A10B1、A11B1、A12B2、A13B2、A14B3、A15B3所对的圆心角皆为30°,气动肌肉A1B1、A2B1、A3B1、A4B2、A5B2、A6B2、A7B3、A8B3、A9B3与相应的过B1、B2、B3点的分布圆切平面之间的空间夹角均为μ,且满足0<μ<2°,气动肌肉A1B1与A2B1之间、A4B2与A5B2之间、A7B3与A8B3之间的空间夹角均为γ,且满足0<γ<4°,气动肌肉A10B4、A11B4、A12B5、A13B5、A14B6、A15B6与中间悬架圆平面之间的空间夹角均为σ,且满足σ<2°,另外A1B1、A2B1、A3B1、A4B2、A5B2、A6B2、A7B3、A8B3、A9B3这9个气动肌肉的长度均为Lw,A10B4、A11B4、A12B5、A13B5、A14B6、A15B6这6个气动肌肉的长度均为Ln。
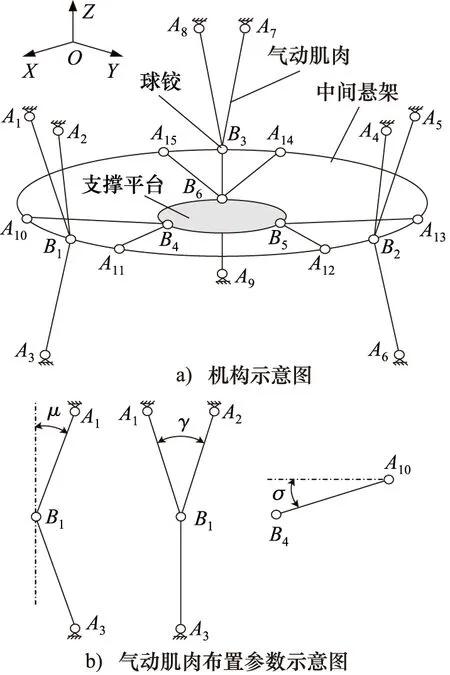
图2 气动肌肉并联机构
1.2 磁流变阻尼并联设计
磁流变阻尼并联机构主要为系统提供阻尼力,耗散系统能量,处于工作平衡位置时,其机构如图3所示,该机构是全对称的,磁流变阻尼器C1D1、C1D2、C2D3、C2D4、C3D5、C3D6与中间悬架圆平面共面,且长度相同,弧D1D2、D3D4、D5D6所对的圆心角均为2α,C1、C2、C3所在的分布圆半径为d,磁流变阻尼器C7D7、C8D8、C9D9皆平行Z轴。
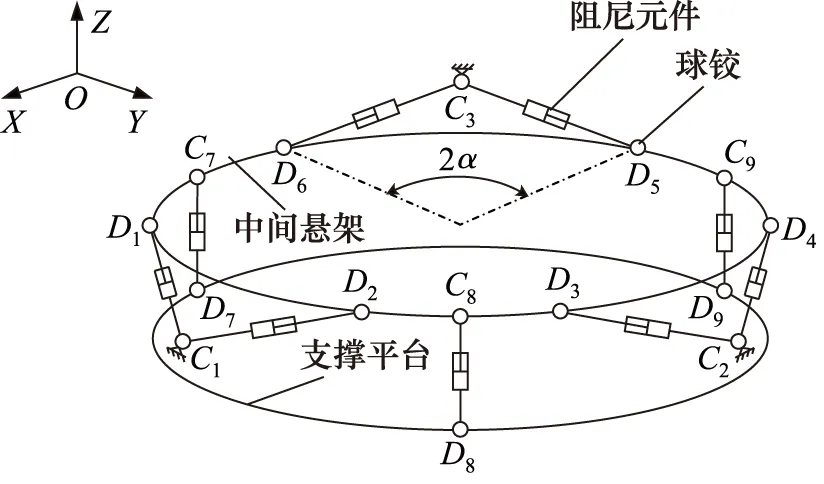
图3 磁流变阻尼并联机构
2 系统雅可比
2.1 气动肌肉子系统的雅可比
系统处于工作平衡位置时,根据运动学理论可求得气动肌肉并联机构的由气动肌肉作用空间到支撑平台笛卡尔六维空间的雅可比矩阵(假设γ、μ、σ很小)。
2.2 磁流变阻尼子系统的雅可比
系统处于工作平衡位置时,同样根据运动学理论可求得磁流变阻尼并联机构的由磁流变阻尼器作用空间到支撑平台笛卡尔空间的雅可比矩阵。

3 载荷/支撑平台振动方程
设支撑平台处于工作平衡位置时基架与中间悬架之间的上层6个气动肌肉的刚度均为kw,下层3个气动肌肉的刚度均为kwd,中间悬架与支撑平台之间的6个气动肌肉的刚度均为kn;基架与中间悬架之间的6个磁流变阻尼器的阻尼系数均为cw,中间悬架与支撑平台之间的3个磁流变阻尼器的阻尼系数均为cn;载荷质量为m,其在惯性坐标系O-XYZ中的惯量矩阵为diag{Jx,Jy,Jz},假设支撑平台和中间悬架的质量远小于载荷质量,可忽略不计。根据功能计算原理,可分别求得隔振系统在工作平衡位置的惯性、刚度及阻尼矩阵:
M=diag{m,m,m,Jx,Jy,Jz}
(1)
kwd,kn,kn,kn,kn,kn,kn}Jk
(2)
6R2d2cwsin2α/(R2+d2-2Rdcosα)}
(3)
由式(1)~式(3)显见,系统的刚度及阻尼矩阵是解耦的,而通过合理地放置载荷可实现惯性矩阵的解耦,因此整个隔振系统此时是完全解耦的。
设支撑平台在惯性坐标系O-XYZ中的振动位移为:
基座在惯性坐标系O-XYZ中的振动位移为:
假设载荷/支撑平台作小位移振动,忽略非线性因素,则载荷/支撑平台的振动方程可写为:
(4)
4 宽频隔振原理及弹性阻尼元件参数计算
由于系统的惯性、刚度及阻尼都是解耦的,因此容易根据式(1)~式(4)将系统解耦成单自由度系统而分别得到沿X、Y、Z轴平移以及绕X、Y、Z轴旋转方向的固有频率:
(5)
(6)
(7)
(8)
(9)
(10)
对于任一方向的单自由度系统而言,若基座作频率ω的简谐振动,则系统的振动位移传递率(振幅比)为:
(11)
根据式(11)可得η与ξ、λ之间的关系曲线,如图4所示。

图4 η与ξ、λ之间的关系曲线
由式(5)~式(10)显见,减小kw、kwd、kn、γ、μ、σ就能降低各方向的固有频率,然而由于载荷需要支撑,且气动肌肉伸缩空间有限,因此其刚度不能无限减小。对于中间悬架与基架之间的9个气动肌肉而言,下层3个不能起到支撑作用(只起稳定作用),其刚度kwd可以任意小,而上层6个将起支撑作用,由于γ、μ很小,根据静力学原理有:
6kwδw=mg
(12)
其中,δw为中间悬架与基架之间上层6个气动肌肉的静变形量。
因为所允许的气动肌肉的伸缩空间有限,因此要求:
δw≤δwmax
(13)
其中,δwmax为相应气动肌肉所允许的最大静变形量。
所以结合式(12)、式(13)可得到这6个气动肌肉的最低刚度:
kwmin=mg/(6δwmax)
(14)
对于支撑平台与中间悬架之间的6个气动肌肉而言,也要起到支撑作用,由于σ很小,则根据静力学原理有:
1.人生三截草,不知哪截好。(人有旦夕祸福,人生也难以预测,将人生几个阶段比喻成三截草,不知道哪个阶段生活会怎么样。)
6σknδn=mg
(15)
其中,δn为支撑平台与中间悬架之间6个气动肌肉的静变形量。
同样由于气动肌肉伸缩空间的限制,因此要求:
δn≤δnmax
(16)
其中,δnmax为相应气动肌肉所允许的最大静变形量。
所以结合式(15)、式(16)可得到该6个气动肌肉的最低刚度:
knmin=mg/(6σδnmax)
(17)
将式(14)、式(17)确定的kw、kn代入式(5)~式 (10)可得:
(18)
(19)
(20)
(21)
(22)
(23)


(24)
(25)
(26)
(27)
(28)
(29)
则根据式(24)~式(29)及阻尼比的取值ξ=0.1~0.3即可确定基架与中间悬架之间6个磁流变阻尼器的阻尼系数cw,以及中间悬架与支撑平台之间3个磁流变阻尼器的阻尼系数cn。
5 结论
针对车载/舰载/机载精密设备的隔振需求,本研究提出了一种六维隔振系统,通过分析得出该系统具有三个特点: ① 刚度及阻尼解耦,因此能大大降低系统参数的设计与计算的复杂度,容易实现各方向性能均衡的隔振; ② 刚度和阻尼可调,支撑频率可大幅降低,因此能隔离超低频的振动, 进而实现宽频隔振; ③ 阻尼布置的优化,提高了各方向阻尼的有效性。所以该系统具有一定的实用价值。
参考文献:
[1]WADA B K, RAHMAN Z, KEDIKIAN R, et al. A Vibration Isolation, Suppression and Steering (VISS)[J]. Journal of Intelligent Material Systems and Structures, 1996, 7(2): 241-245.
[2]THAYER D, CAMPBELL M, VAGNERS J, et al. Six-axis Vibration Isolation System Using Soft Actuators and Multiple Sensors[J]. Journal of Spacecraft and Rockets, 2002, 39(2): 206-212.
[3] 张春良,梅德庆,陈子辰.微制造隔振平台振动的模糊广义预测控制[J].机械工程学报,2007,43(12):194-201.
[4]杨庆俊,王晓雷,郑钢铁.气动八作动器隔振平台的主动隔振研究[J].应用力学学报,2007,24(3):339-342.
[5]石奇端,马履中.六自由度并联机构组合弹簧阻尼减振装置[J].农业机械学报,2007,38(8):128-131.
[6]李坤全.6-RSS并联机构在六维主动减振平台中的应用研究[D].北京:北京交通大学,2008.
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
施工技术(中英文)(2022年9期)2022-06-21
建材发展导向(2022年5期)2022-04-18
广东建材(2022年3期)2022-04-13
中学生数理化·中考版(2021年10期)2021-11-22
中国环境监察(2016年7期)2016-10-23
北京汽车(2016年6期)2016-10-13
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
汽车实用技术(2015年8期)2015-12-26
