牵引变电站带电水冲洗机器人设计
2015-04-16 08:54西南交通大学机械工程学院四川成都6003朔黄铁路发展有限责任公司河北肃宁06350
液压与气动 2015年5期
, , , , ,(. 西南交通大学 机械工程学院, 四川 成都 6003; . 朔黄铁路发展有限责任公司, 河北 肃宁 06350)
引言
牵引变电站担负着整个铁路系统的用电安全,电气化铁路沿线牵引变电站污秽闪络事故却时有发生,已经成为电气化铁路的一大公害。为了避免污闪事故的发生,应对绝缘子进行清扫作业。现在很多供电段都已经采用了带电水冲洗来代替传统的人工清扫作业,提高了工作效率,降低了劳动强度,保证了铁路运输组织作业正常运行[1,2]。
但是由于经验、技术和环境等因素,工作人员不能对影响水冲洗安全的每个因素进行准确的判断,因此导致了许多事故的发生。所以为了保证工作人员的人身安全,针对110 kV牵引变电站,设计开发出一种新型的履带式带电水冲洗机器人。能够通过远程控制,完成大部分的水冲洗作业[3-6]。
1 总体设计方案
整个系统主要由轮式车辆平台、2台履带式水冲洗机器人组成。轮式车辆平台负责将水冲洗机器人等配套设备运送至牵引变电站内。再由工作人员将机器人从车上搬下,进行水冲洗作业。
1.1 轮式车辆平台
轮式车辆平台上搭载有柴油发电机、电动机、离心水泵、水箱等水冲洗的配套装置[7]。平台的动力由柴油发电机提供。柴油发电机为电动机供电继而驱动水泵。水泵通过水压系统向2台水冲洗机器人供水。
水压系统主要由离心泵、分流阀、电磁开关阀以及溢流阀等组成(图1)。通过变频器调节发电机的转速进而调节离心泵流量和扬程来满足不同冲洗要求。溢流阀来保证水压系统的安全运行,通过控制电磁开关阀实现非工作状态下的系统卸荷。从泵出来的水经过分流阀后均匀的输送给两台机器人使用,并能够通过两个电磁开关阀单独控制通断。
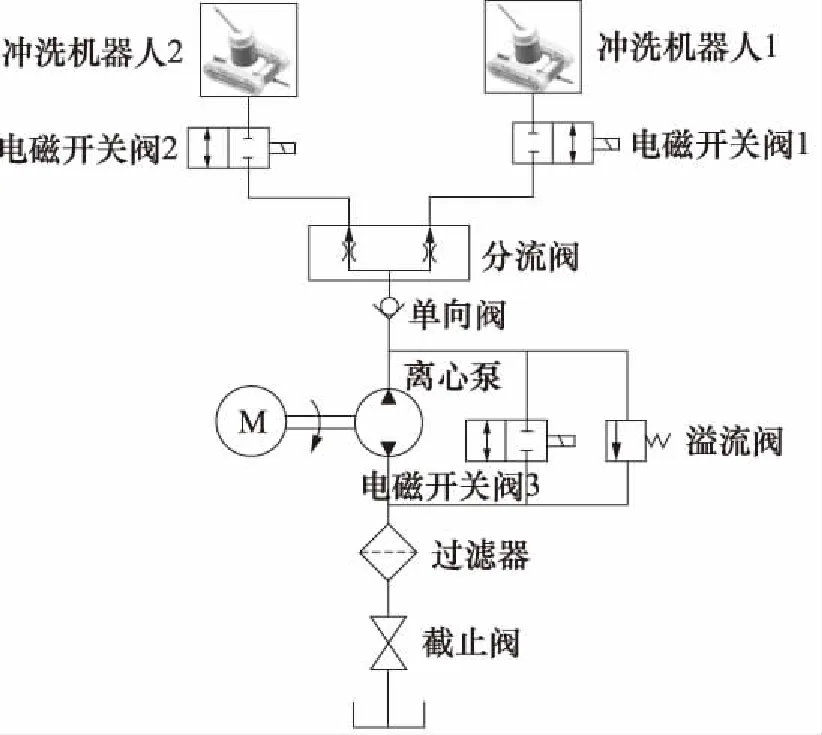
图1 水压系统工作原理图
1.2 水冲洗机器人
水冲洗机器人分为工作和行走两大部分。工作部分要完成旋转和俯仰动作[8],结构如图2所示。履带式底盘具有道路适应性强,转弯半径小等优点,作为工作部分的载体,实现工作部分在场地内的移动。冲洗工艺选择双枪跟踪法,两台水冲洗机器人协调作业。
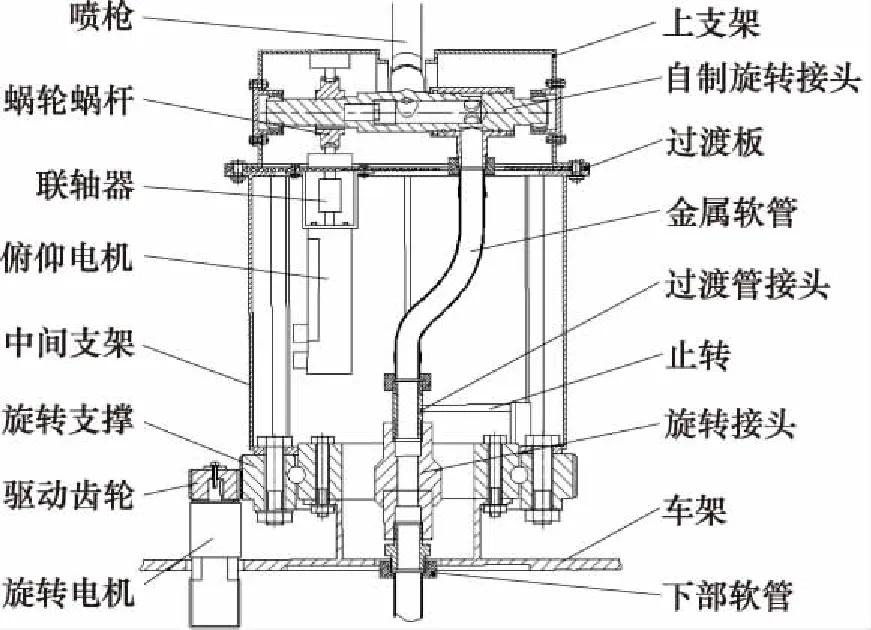
图2 工作部分结构
旋转动作:控制下部旋转伺服电机,通过齿轮传动使旋转支撑转动,带动其上的中间支架以及上支架的同步转动,安装在自制旋转支撑上的喷枪也随之转动。
俯仰动作:控制上部俯仰伺服电机,而后经过减速增矩后带动自制旋转接头转动,从而实现喷枪的俯仰动作。由于采用了具有自锁的蜗轮蜗杆传动形式,在断电时,喷枪能够停止在工作位置。
水压系统供应的水从下图管道流入图中下部软管中,通过旋转接头进入上部金属软管,再流入自制旋转接头,最后通过喷枪喷出。
2 机器人关键部件设计
2.1 喷嘴设计
喷嘴是整个设计中很重要的一个部件,喷嘴的优劣直接影响到水冲洗的效果。分析比较几种类型的喷嘴的结构和性能特点,最终选取圆柱形喷嘴。它具有高的水柱射程和水流密集度,水流不易散花,能够有效地除去绝缘子表面的污垢。设计的喷嘴结构如图3所示。
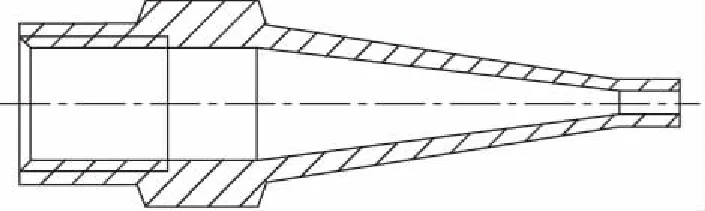
图3 喷嘴结构图
取进口压力为1 MPa,出口直径选择中冲洗4 mm。出口速度约为44.7 m/s,反冲力大小约为25 N,流量为33.6 L/min。
使用流体仿真软件对喷嘴性能进行计算,从得出的结果中可以看出:出口最大速度为44.7 m/s(如图4),流量为32.4 L/min,与理论计算结果对应,说明计算模型建立正确[9,10]。
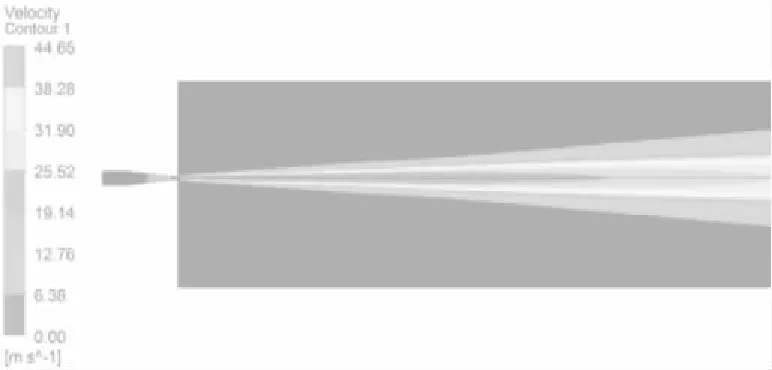
图4 喷嘴出口处速度云图
现行电力设备带电水冲洗导则中规定冲洗110 kV 时水柱长度不得小于3 m。保持一定的水柱长度是保证带电水冲洗时人身安全的必要条件[11]。同时,为了具有较好的冲洗能力,水柱在此距离外还应具有一定的打击力。而这些都在仿真结果中都有体现,从图5不同位置处垂直于轴线流体速度分布曲线中,可以看到,在水柱直径0.2 m处水流速度仍有4.6 m/s,能够满足水冲洗的去污要求。
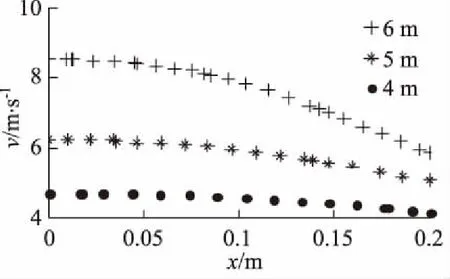
图5 距喷嘴4 m、5 m和6 m时垂直于轴线流体速度分布曲线
2.2 旋转接头设计
由于机器人要完成旋转和俯仰动作,如果在两个机构的重合部分不使用旋转接头,那么连接到旋转轴上的水管就会不断地被动弯曲,容易造成疲劳破坏,影响正常的生产作业。其性能的优劣对整个系统的长期可靠工作至关重要。
然而市面上没有能够直接满足工作要求的旋转接头,所以在此处就自行设计了一种旋转接头,结构如图6所示。旋转接头采用通轴形式,避免在接口处形成简支轴同时,采用金属软管连接入流口,防止旋转部分承受扭矩,造成疲劳破坏,保证旋转接头的密封性能,延长其工作寿命[12]。
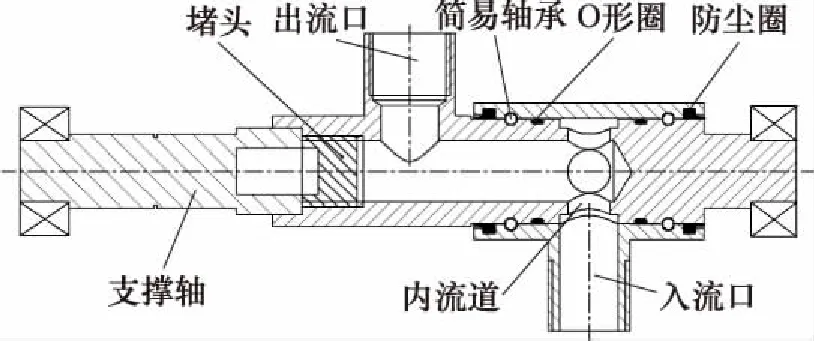
图6 自制旋转接头结构
3 机器人总体参数计算
(1) 重量:为了使冲洗机器人在工作时能够保持静止,在不增加结构复杂程度的情况下,依靠其自身与地面摩擦力来克服机器人的运动,这就对重量就有一定的要求。整台机器人(包括地盘)的重量约为40 kg;
(2) 尺寸:在能够满足重量要求得前提下,尽量减小尺寸,方便车上放置以及人员搬运。最终尺寸定为 800 mm×600 mm×800 mm;
(3) 运行速度:因为运行场地道路狭窄,运行速度不宜过大,考虑到现场工作情况,选定运行速度为1 m/s;
(4) 转弯半径:底盘驱动采用两个普通交流电机,前后布置,为差速转向,理论转向半径为0,并且地盘长度尺寸较小,满足现场作业道路要求;
(5) 转角范围:考虑到水冲洗准则要求水平和垂直冲洗角度都应小于45°。为了增加喷射范围和操作灵活性,工作部分可以做360°回转以及20°~90°的俯仰;
(6) 水管管径:参照水在管道内流速常用值,应用场合为泵出口时,平均流速推荐值为1.0~3.0 m/s,现选取2.5 m/s。所以管径选择19 mm的夹布胶管。
4 结论
履带式带水冲洗机器人针对110 kV铁路牵引变电站,严格按照电力设备带电水冲洗导则进行设计。同时,使用了计算机仿真软件予以辅助设计。可以通过控制其俯仰和旋转动作以及两台机器人之间的协调作业,实现多种水冲洗动作。能够提高水冲洗作业的智能化程度和安全性能。
参考文献:
[1]WANG R, SUN L. Safety and Technique of Hot Washing[C]//Proceeding of ESMO′93, IEEE 6th International Conference on Transmission and Distribution Construction and Live-line Maintenance, the Riviera Hotel, Las Vegas, Nevada, September 12-17, 1993 New York:Institute of Electrical and Electronics Engineers, 1993:225-239.
[2]王如璋.带电水冲洗的现状及发展[J].东北电力技术,1994,(7):41-43.
[3]Yasuda M, Fujimura T. Study and Development of Highwater Pressure Hot-Line Insulator Washing Equipment for 500 kV Substation[J]. IEEE Transactions on Power Apparatus and Systems, 1976, 95(6):1919-1928.
[4]HE Y, CHEN J S. The Research of the Automatic Washing-brushing Robot of 500 kV DC Insulator string[C]//Proceeding of ESMO′93, IEEE 6th International Conference on Transmission and Distribution Construction and Live-line Maintenance, the Riviera Hotel, Las Vegas, Nevada, September 12-17, 1993 New York:Institute of Electrical and Electronics Engineers, 1993:411-424.
[5]车立新,杨汝清,顾毅.220/330 kV变电设备高压清扫机器人设计[J].机器人,2005,27(2):102-107.
[6]CHE L X, GU Y. A New Designed Hot-Line Work Robot for Sweeping Post Insulators at High-Voltage[J]. The International Journal of Advanced Manufacturing Technology, 2006, 29(9):1068-1073.
[7]王佩,于兰英,王国志,等.铁路牵引变电所轮式带点水冲洗车设计[J].中国铁路,2013,(1):79-81.
[8]王国志,王兴民,单宝成,等.KJ-A型电气化铁道绝缘子带电水冲洗装置的研制[J].电气化铁道,2003,(1):26-28.
[9]杨国来,周文会,刘肥.基于FLUENT的高压水射流喷嘴的流场仿真[J].兰州理工大学学报,2008,34(2):49-52.
[10]张俊,李晓辉,朱玉泉.锥形喷嘴水射流反推力的研究[J].机床与液床,2007,35(4):139-142.
[11]GB/T 13359-2008,电力设备带电水冲洗导则[S].
[12]王步洲,李素斌.自制旋转接头结构改进[J].设备管理与维修,2008,(12):52.
猜你喜欢
排灌机械工程学报(2022年12期)2023-01-02
发明与创新(2021年39期)2021-11-05
中老年保健(2021年11期)2021-08-22
水利规划与设计(2021年6期)2021-06-19
能源工程(2021年1期)2021-04-13
中国临床护理(2020年5期)2020-10-09
世界睡眠医学杂志(2019年3期)2019-04-26
中国有色冶金(2018年1期)2018-02-01
中国煤层气(2015年3期)2015-08-22
汽车维护与修理(2015年1期)2015-02-28