减摇鳍无源阻力加载系统分析
2015-04-16 09:05:13海装重庆局重庆4000重庆华渝电气集团有限公司重庆4000
液压与气动 2015年6期
, (.海装重庆局, 重庆 4000; .重庆华渝电气集团有限公司, 重庆 4000)
引言
为了验证减摇鳍的实际使用性能,需要在陆上建立加载试验装置,减摇鳍加载是对鳍轴施加一定规律的载荷。根据加载工作方式不同,可分为加载式加载系统(简称加载系统)和阻力式加载系统(简称阻力系统)。前者一般采用电液伺服阀控液压缸的方式,利用改变流入(流出)加载腔的流量来控制加载腔的压力,从而实现加载。后者一般采用各种压力阀的阻力原理,调节加载腔中油液流动的阻力来实现加载。
而阻力加载系统有两种方式:使用油泵加载称为主动式加载(有源加载);不使用油泵加载称为被动式加载(无源加载)。
在减摇鳍陆上台架试验时,我们采用了无源阻力加载系统来实现负载的模拟,无源阻力加载系统利用了先导式溢流阀具有良好的恒定压力特点,其调定的阻力压力不会随流量的变化而变化,不存在多余力的现象,是一种较理想的加载系统。另外本系统采用无加载油泵供油,具有耗能少、噪音低、发热量较少等优点。
1 系统工作原理
减摇鳍被动式无源加载系统的工作原理如图1所示。该系统由加载摇臂、加载油缸、单向阀组、加载溢流阀和无源油箱组成。两加载油缸的有杆腔与无杆腔交叉相通,从而形成了两个容积相同的密闭容腔,保证了油缸的活塞杆交替往返的速度基本相同。鳍轴1被驱动转动 (转动行程一般为±34°)时, 加载摇臂2带动加载油缸3的活塞杆运动,相应的加载腔向外排油,经加载溢流阀节流后回油箱, 该腔的压力受溢流阀5的控制,加载油缸的另一腔直接从油箱6吸油。
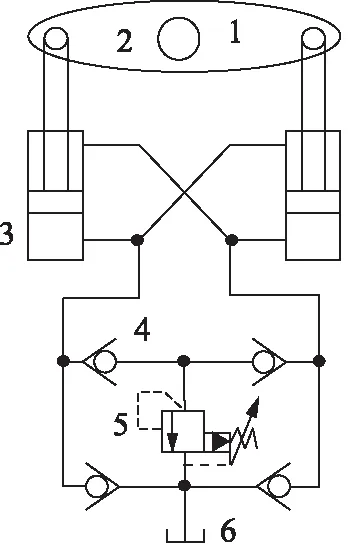
1.鳍轴 2.加载摇臂 3.加载油缸 4.单向阀 5.加载溢流阀 6.油箱
由于4个单向阀组成了桥式连接,加载油缸的任一油腔排油都要经过加载溢流阀,另一腔都从油箱吸油。这种加载方式不需要加载供油泵,故而不能主动推动鳍轴转动,但是节约了大量的能源。
2 数学模型
为了进一步简化模型,加载油缸的有效作用面积用AP表示:
(1)
式中,D—— 加载油缸的缸径
d—— 加载油缸的杆径
模型简化如图2所示。
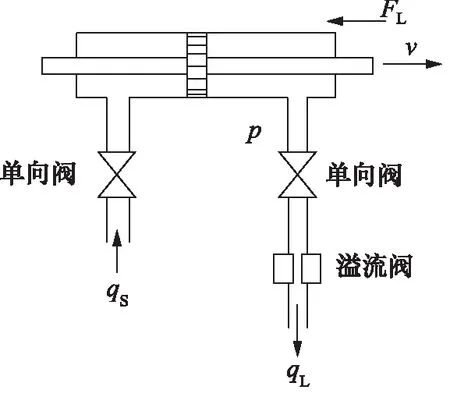
图2 系统模型简图
加载油缸提供的负载力FL始终与鳍轴转动方向相反,稳态条件下负载压力恒定,负载力也保持恒定。
加载油缸的流量方程:
(2)
式中,AP—— 加载油缸有效作用面积
xP—— 加载油缸活塞位移
Vt—— 加载油腔到溢流阀的总体积
βe—— 液压油的弹性模量
Ce—— 加载油缸总泄漏系数
p—— 加载腔压力
不考虑结构柔度,加载油缸活塞杆受力平衡方程:
(3)
式中,mP—— 加载油缸活塞总质量
BP—— 加载油缸活塞运动的黏性阻力系数
k—— 加载油缸活塞运动的弹性阻力系数
忽略加载溢流阀先导阀部分,则加载溢流阀的主阀部分压力-流量特性方程可表示为:
p=KpxV+KeqL
(4)
式中,Kp—— 加载溢流阀主阀阀口压力增益系数
xV—— 加溢流阀主阀阀芯位移
Ke—— 加载溢流阀主阀阀口压力-流量增益系数
将式(2)~(4)进行拉氏变换可得:
(5)
FL=pAP+(MPs2+BPs+K)xP
(6)
p=KpxV+KeqL
(7)
联立式(5)、式(7),并考虑Ke、Ce<<1,可得:
(8)
(9)
结合式(6),可得系统的方块图,如图3所示。
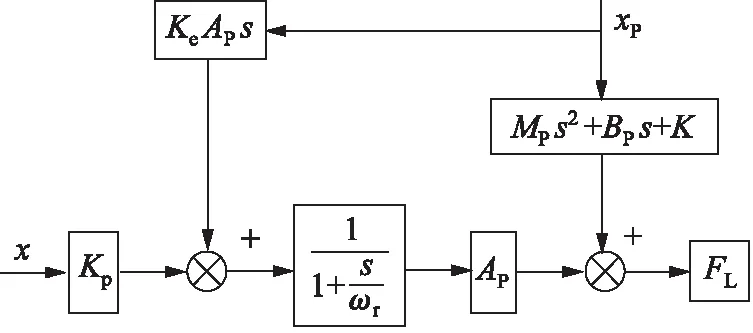
图3 系统方块图
由方块图,联立式(6)、式(8),消去中间变量p,可得:
(10)
(11)
(12)
当加载溢流阀的主阀阀芯未开启时,即xV=0时,系统由一个惯性环节和一个二阶微分环节构成。由式(11)可知,二阶微分环节的固有频率很小,此环节的开环增益也很小,对高频信号有抑制作用,故而鳍轴转动的周期较大时,系统随动性能较好。
此系统采用的加载溢流阀为先导型溢流阀,由于先导型溢流阀的传递函数由先导阀部分和主阀部分组成,总传递函数相当复杂,因此,此处只选取主阀部分做简单的定性分析。主阀部分由1个惯性环节、1个二阶振荡环节和1个微分环节组成,其中,由于主阀的流量增益系数较大,因此微分环节的频率相当高,不在工作区域内;二阶振荡环节的固有频率不高,因此起主导作用的是一阶惯性环节,其转折频率可表示为:
(13)
式中,V0—— 溢流阀前控制腔体积
Ks—— 溢流阀主阀阀芯弹簧刚度
因此选取较小的V0值,对溢流阀的响应有极大的影响。
系统中加载油缸的吸油腔与排油腔是交替互换的,当加载腔排油时,吸油腔从油箱吸油,其吸油能力与吸油腔的真空度和吸油单向阀的开启压力有关。真空度越大,单向阀的开启压力越低,吸油能力越好。所以为了保证吸油路的畅通,吸油单向阀的开启压力必须小于标准大气压力(约为0.1 MPa),实际使用中采用开启压力为0.05 MPa的单向阀。
同时加载油缸客观存在部分的内、外泄漏量,吸油腔难以完全被油缸活塞抽成真空,即真空度较小,故鳍轴反向时,该腔变成了排油腔被压缩,但活塞行程会压缩少部分空气,未直接接触油液压缩,所以加载溢流阀的进口压力会突然降低,这与减摇鳍无源阻力加载系统在实际调试应用时的情况一致。
由式(10)可知,系统的固有特性可由一个惯性环节表示,系统转折频率由式(9)表示。该频率对系统的响应起主导作用,降低加载油缸与加载溢流阀之间的油液体积,增大液压油液的弹性模量(一般取700 MPa),减少空气的混入,有助于提高系统的响应频率。
3 结论
通过以上的数学建模和理论推导,可得出如下结论:
(1) 所介绍的减摇鳍无源阻力加载系统为O型系统,不含有校正环节及反馈环节,是有差系统;
(2) 本加载系统的响应能力不仅受本身系统限制,还取决于加载溢流阀的响应能力;
(3) 缩短加载油缸与加载溢流阀之间的管路,有助于提高系统的响应频率;
(4) 本系统的油液中混进的空气,会极大地影响被压缩油液的βe值,不利于吸油腔吸油,更不利于系统工作,因此,系统工作前必须先排除内部的空气;
(5) 本系统不含加载油源装置,是良好的节能系统,而且本系统有效地实现了对减摇鳍装置进行模拟负载加载;
(6) 本系统可以等效地应用于类似的行程不超过一周的往复运动工作系统,例如船用舵机(±35°)等。
参考文献:
[1] 李壮云,葛宜远,陈尧明.液压元件与系统[M].北京:机械工业出版社,2000.
[2] 王春行.液压控制系统[M].北京:机械工业出版社,2000.
[3] 李福义.液压技术与液压伺服系统[M].哈尔滨:哈尔滨工程大学出版社,1992.
[4] 易孟林,曹树平,刘银水.电液控制技术[M].武汉:华中科技大学出版社,2010.
[5] 洪超.舰船减摇鳍伺服系统传递函数研究[J].液压气动与密封,2008,(4):14-17.
[6] 梁利华.液压传动与电液伺服系统[M].哈尔滨:哈尔滨工程大学出版社,2005.
猜你喜欢
重型机械(2020年2期)2020-07-24 08:16:20
水电站机电技术(2020年3期)2020-04-28 10:27:56
中北大学学报(自然科学版)(2020年1期)2020-03-17 03:48:46
船海工程(2019年3期)2019-07-03 09:34:02
制造业自动化(2018年7期)2018-07-21 07:35:20
中南大学学报(自然科学版)(2017年8期)2017-11-01 14:18:45
中国塑料(2015年5期)2015-10-14 00:59:53
筑路机械与施工机械化(2015年1期)2015-09-18 12:16:11
液压与气动(2015年2期)2015-04-16 08:51:21
油气田环境保护(2014年3期)2014-04-27 10:54:35