
室内消防智能引导车的设计与分析*
2015-04-15 07:29朱方园肖海利南京信息职业技术学院机电学院江苏南京210023
机电工程技术 2015年8期
关键词:设计
颜 玮,朱方园,肖海利(南京信息职业技术学院机电学院,江苏南京210023)
室内消防智能引导车的设计与分析*
颜玮,朱方园,肖海利
(南京信息职业技术学院机电学院,江苏南京210023)
摘要:设计了一种用于建筑物内部起火,或较大火灾现场开辟救援通道的智能引导车。通过对消防机器人发展现状和建筑物内火灾现场的简要分析,对智能引导车的硬件和软件展开了具体设计。该智能引导车具有履带型四驱行走机构、气式清障驱动机构、干粉式灭火机构、自动识别传感系统和系统控制器,能自主判断道路状况,实现爬坡、清障、越障、灭火等功能,为消防机器人实现室内救援提供了新的思路。
关键词:室内消防;智能引导车;设计
*中国高等职业教育研究会“十二五”规划课题(编号:GZYLX2011073)
0 引言
国外,美、前苏联、英、日、法、德等国较早开展消防机器人研究。其中,日本的消防机器技术引领全球,数量也占据全球之首[1]。国内,我国863项目成功研制了我国第一代消防机器人[2]。该消防机器人具有行走机构、图像传输系统、探测系统和冷却自卫系统等,能进行防爆控制、安全自卫、化学检验、火情侦察。我国消防机器人技术的发展,大大减少国家财产损失和灭火救援人员伤亡。但随着高层建筑、地下建筑和大型石化企业不断涌现,这些建筑和企业运营的特殊性,导致此类场所的火灾事故发生率有所提高,而且诸如化学危险品和放射性物质泄漏以及燃烧、爆炸等也明显增加救援难度。面对高温、黑暗、有毒和浓烟等危害环境,研制新型消防机器人配备显得尤为重要[3-4]。
1 智能引导车总体方案设计
本文设计的智能引导车用于高层建筑、地下建筑和石化企业火灾现场的探测和破障,给消防人员寻找安全通道,为营救创造条件。鉴于上述火灾现场的特殊环境,该智能引导车需具备以下功能:
(1)行走功能:能够前进和后退、左右转、加减速,能穿越低矮的阶梯和凹凸不平地面;
(2)排障功能:能识别障碍物类型,对于可清除障碍物,将直接清除,对于不可清扫障碍物,采取绕开原则;
(3)灭火功能:能检测热源,避开热源,若检测到热源点过多,则选择最弱处,同时还可向四周以及向正前方喷射干粉消灭弱小火源;
(4)环境监测功能:如检测火灾现场有毒气体;
(5)语言提示功能:语音提示可前进或障碍转向行走,警告提示危险环境。
根据上述功能要求,该智能引导车需具有履带型四驱行走机构、气式清障驱动机构、干粉式灭火机构、自动识别传感系统和系统控制器等功能模块,总体设计方案如图1所示。
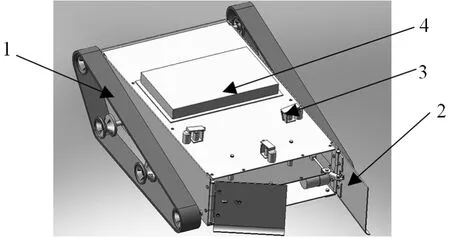
图1 智能引导车结构示意图
2 智能引导车本体结构设计
2.1履带式四驱行走机构
履带式行走机构可在凹凸不平、泥泞松软等恶劣道路上平稳行走,能越过一定高度物体和上下一定高度台阶,通过一定宽度的断裂带,实现在复杂环境下持续、稳定行走。履带设计形状有倒梯形、直角梯形、三角形[5-6]等,其驱动方式也有前轮驱动、后轮驱动、双轮驱动等多种方案。合理选择履带作为小车的行走机构,需要对比轮式行走机构与履带式行走机构特点及考虑环境因素。
履带布局设计成钝角三角形,能降低行走机构重心,减轻重量,缓解轴的承受载荷,有利于行走过程中保持平稳,而且方便上、下坡,也能够节省材料,降低成本。采用四轮驱动,可提供较大驱动力,易实现车体的前进、加减速、原地旋转、转弯、上下坡等动作。由于直流电动机驱动启动转矩大,运行稳定,便于控制,电源获得方便等,因此本文设计了由直流电机驱动的履带式四驱行走机构,如图2所示。
在选材上,智能引导小车履带选用金属材质履带,耐火、耐高温,与带齿金属驱动轮配合,可防止打滑,行走可靠,能满足特定工作环境下的要求。
2.2气式清障驱动机构
气式清障驱动机构的功能是清除由燃烧产生的可清除的废墟障碍,方便消防人员的快速进入,或者能帮助受困人员快速寻找到安全区域。如图3所示,该机构的主要器件包括气泵、二位五通电磁阀、气缸、排障板、气源处理器、气管、接头等组件,该结构装于车体前端,由专门的识别感应器对障碍物进行识别,做出判断处理。利用压缩空气作为驱动力,电磁阀控制气体的流向,控制气缸的往返运动推动排障板进行排障和复位。
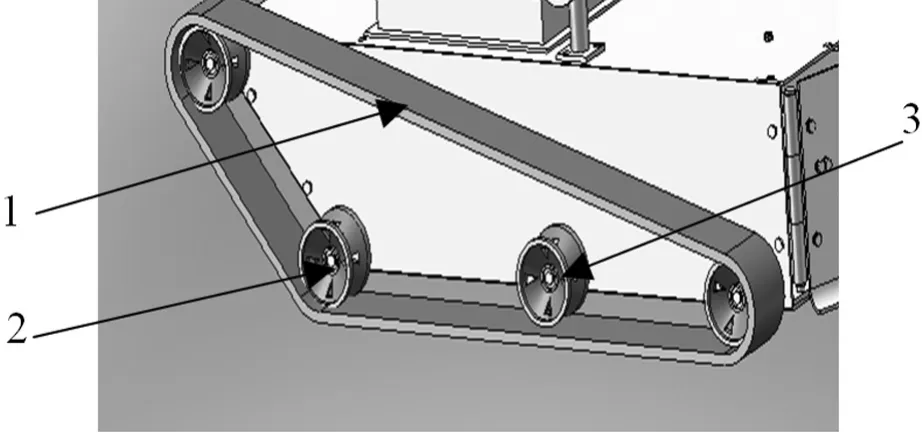
图2 行走机构
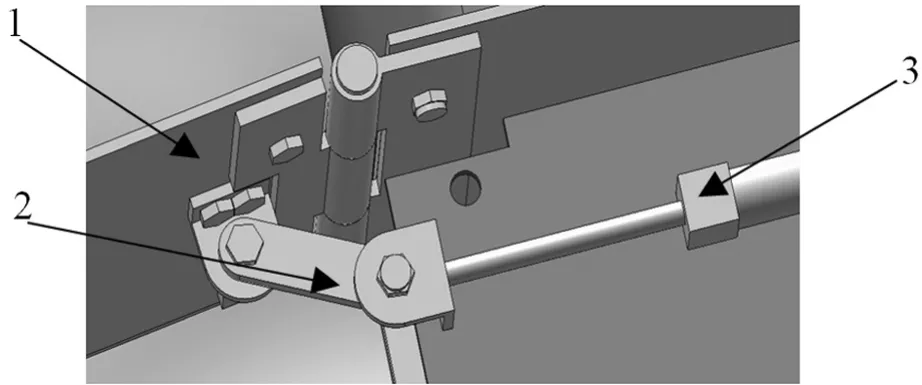
图3 清障机构
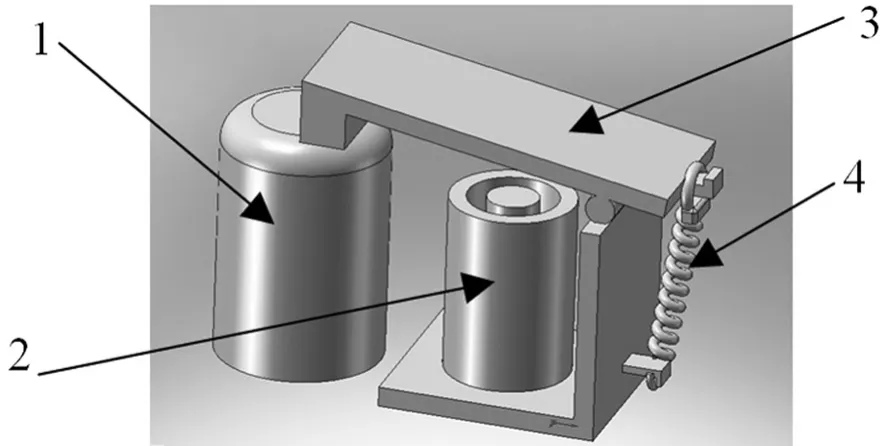
图4 灭火机构
2.3干粉式灭火机构
干粉式灭火机构元件主要用于保护车体不受到火源威胁,同时辅助消防员灭火。它主要有模拟干粉瓶、电磁机构和杆件,如图4所示。
电磁机构易于控制,可采用杠杆机构与电磁机构相结合来压下灭火开关。当控制信号传递给电磁机构,吸引衔铁动作,带动杠杆压下干粉灭火器开关。当控制信号结束,电磁机构失电原理,弹簧将衔铁复位,带动杠杆复位,干粉灭火器关闭。
灭火器在车体上分布的位置分别为左右和前方,全方位保护车体,位置分布时注意机构正前方没有其他元件遮挡。干粉罐放在车体内部,避免高温。
2.4自动识别传感系统
传感器系统起到环境数据采集及处理的作用,它把处理的数据传给机器人控制系统。它由模拟量传感器系统和数字量传感器系统组成。模拟量传感器系统包括:红外测距、灰度、接近开关、温度传感器、二氧化碳传感器等。数字量传感器系统包括:模拟量传感器扩展模块、电子罗盘、光电传感器扩展模块等。其组成包括:MCU、模拟量传感器、I2C通讯接口等,实现数据采集、数据处理和数据传输的功能。
3 智能引导车控制系统设计
基于上述的功能模块,本文设计的智能引导车如图5所示。该智能引导车的主控制器是南京智欢电子科技有限公司自主研发的智能机器人控制器。该控制器以LM3S1607处理器为核心,包括微处理器、存储器(FLASH存储器和SDRAM存储器)、键盘电路、与传感器系统通讯电路、LCD液晶显示电路、PWM驱动电路、电源供电电路等。
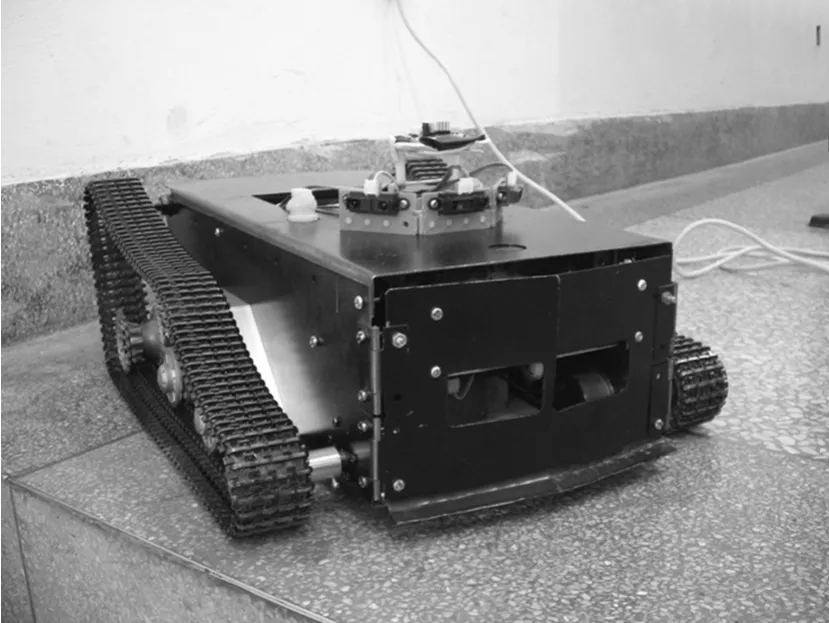
图5 智能引导车
该智能引导车的主控系统软件包括:系统启动程序、各模块硬件设备驱动程序、实时操作系统(Real Time Operating System,RTOS)等,系统控制程序流程如图6所示。
经模拟试验测试,小车能较好地行走于坡道及不平道路上,能自动识别墙体和障碍物,并可将障碍物推开。模拟火点也可开启灭火机构,进行自我保护。智能引导车的机构设计和控制系统,基本达到了预期的设计目标。
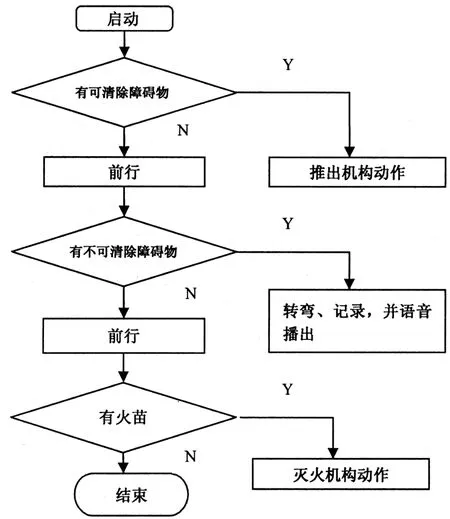
图6 小车程序控制流程图
4 结论
充分运用现代先进消防机器人的结构特点,结合室内消防的实际需求,设计了一种用于建筑物内部起火或较大火灾现场开辟救援通道的智能引导车。该小型智能引导车体积小,结构简单,成本低,灵活性强,自动化程度高,在高层建筑、地下建筑和大型石化企业将具有一定的应用前景。
参考文献:
[1]高瑞霞.美国的灭火与救援机器人研发综述[J].消防技术与产品信息,2005(3):59-60.
[2]胡斌.消防侦察机器人[J].机器人技术与应用,2005(6):19-22.
[3]陈引初,胡斌.消防救援机器人的研究[J].消防技术与产品信息,2005(2):23-25.
[4]卢勇,李瑞翔,张洪,等.消防报警机器人模型设计[J].中央民族大学学报:自然科学版,2009,18(4):53-56.
[5]贾广利,魏娟,马宏伟.一种六履带侦察机器人的运动分析及结构设计[J].机床与液压,2008,36(11):9-12
[6]候宪伦,葛兆斌,李向东,等.履带式机器人的设计[J].机械制造,2009,47(541):40-42。
(编辑:阮毅)
Designand Analysisof Intelligent Guided Vehiclefor Indoor Fire-Fighting
YAN Wei,ZHU Fang-yuan,XIAO Hai-li
(Department of Mechanical and Electrical Engineering,Nanjing College of Information Technology,Nanjing210023,China)
Abstract:In this paper an intelligent-guided vehicle is designed for opening a rescue way in fire building.With brief analysis to development of fire robot and situation in fire building,detail design for guided vehicle involves hardware and software.Equipped with four-wheel driving walking mechanism,remnant-clear mechanism,dry power extinguisher,automatic identification system and system controller,it can distinguish the different ways,walk on slope,clear or avoid collapse and mess,and even put out a fire.It provides a new thinking for fire robot indoor rescue.
Key words:fire protection indoor;intelligent-guided vehicle;design
作者简介:第一颜玮,女,1980年生,江苏江都人,硕士研究生,讲师。研究领域:工业机器人和机电一体化技术。
收稿日期:2015-06-30
DOI:10.3969/j.issn.1009-9492.2015.08.002
文章编号:1009-9492 (2015 ) 08-0007-03
文献标识码:A
中图分类号:TU998.1
猜你喜欢
河北画报(2020年8期)2020-10-27
现代装饰(2020年7期)2020-07-27
流行色(2020年1期)2020-04-28
电子制作(2019年19期)2019-11-23
电子制作(2019年15期)2019-08-27
电子制作(2019年7期)2019-04-25
艺术启蒙(2018年7期)2018-08-23
海峡姐妹(2017年7期)2017-07-31
Coco薇(2017年5期)2017-06-05
商周刊(2017年26期)2017-04-25
