基于新型非线性PID 控制算法的V 型滤池液位控制①
2015-04-14 08:05盛娜,夏励,钱宏
佳木斯大学学报(自然科学版) 2015年4期
盛 娜,夏 励,钱 宏
(1.安徽工业大学工商学院,安徽马鞍山243002;2.马鞍山钢铁股份有限公司,安徽马鞍山243021;3.中冶华天工程技术有限公司,江苏南京210019)
0 引 言
V 型滤池自动过滤过程大都采用恒水位、恒滤速的控制过程,达到进出水平衡,是污水处理厂净水工艺中的重要环节.滤池的运行水位过高,将会导致进水堰的淹没流态形成雍水,导致邻近滤池之间水面的串通,使相互独立的滤池自控装置在检测滤池运行水位的变化量时遇到干扰,使其难以实现自控的调节(V 型滤池实施恒水位过滤,其运行水位的变化量常调控在3CM 左右).过低的运行水位,满足不了砂层以上水深的要求,就可以产生滤层中的负水头现象,会导致溶解于水中的气体释放出来而形成气泡,造成“气阻”,破坏滤层的结构,导致滤砂的流失[1].
1 控制系统描述与建立
V 型滤池生产工艺的恒水位过滤控制流程如图1 所示,其工作原理为:控制系统根据检测仪表测得的液位值,与设定液位值进行比较后,通过控制器输出改变阀门定位器的给定值,从而控制进入阀体进气的增量,改变调节阀门的开度,控制出水量,维持V 型滤池中水液位的稳定,达到V 型滤池的恒水位过滤功能.
根据上述工艺要求及控制系统特点,本文设计的一种非线性PID 控制算法的V 型滤池液位控制系统采用串级控制系统(如图2 所示),副回路是位置环,采用非线性PID 来控制阀门定位器,使其准确定位;主回路是液位环节,采用Smith 预估补偿环节,克服由于在污水处理过程中,液位波动频繁、杂质污垢、阀门浸蚀和腐蚀等因素的影响,而导致控制具有较大的滞后性,控制速度难以跟上液位变化的速度.为保证液位控制的连续性,避免调节死区,在控制回路中串入抖振小信号,使得液位自动控制顺利进行[4,7].

图1 V 型滤池液位控制系统结构图
2 控制算法设计
Smith 预估器设计思想是[5]:预先估计出控制过程的动态响应,然后由预估器进行补偿,力图使被迟延了τ 的被调量超前反映到调节器,使调节器提前动作,从而减小超调量,加速调节过程.本文根据V 型滤池液位控制系统的特点,在非线性PID控制算法的基础上利用Smith 预估器进行滞后补偿.如图3 所示.
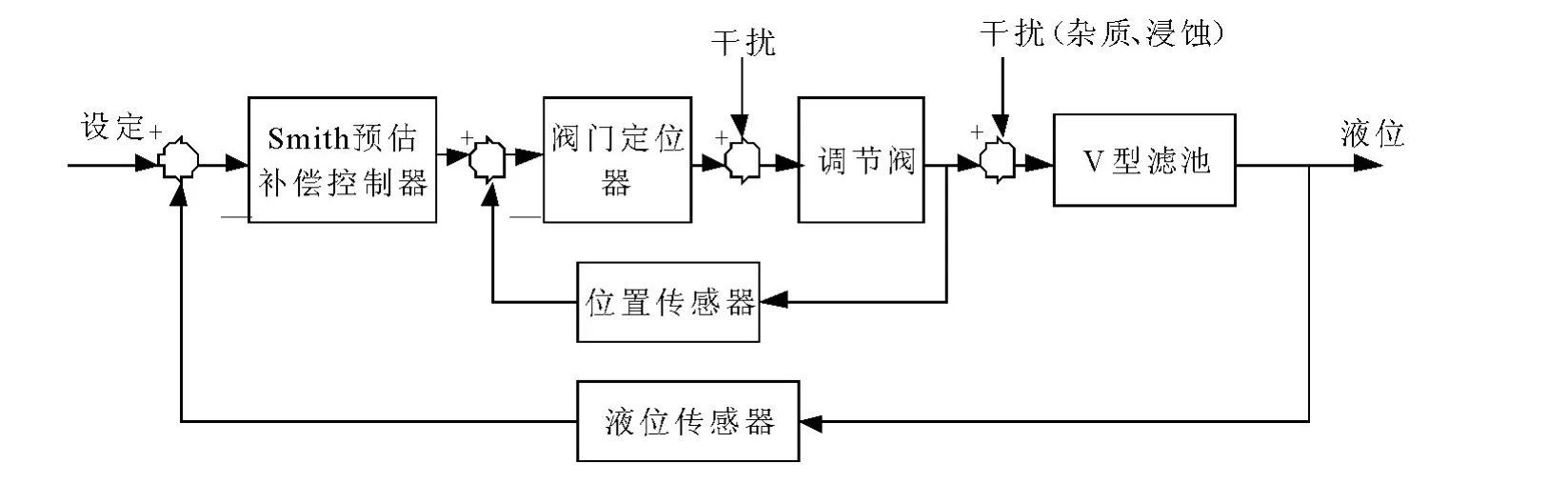
图2 V 型滤池液位控制原理框图
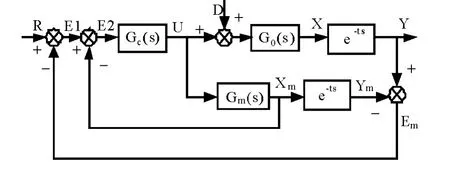
图3 Smith 补偿的控制系统方框图

图4 kp,kd,ki 的变化曲线
在图3 中,该系统有两条反馈回路,其中Gc(s)为非线性PID 控制器的传递函数.Smith 预估补偿器的控制策略[6]为:若G0(s)=Gm(s),D=0,则Y=Ym,Em=Y-Ym=0,X=Xm,则可用Xm这一条反馈路径来实现纯滞后环节.若或,则,此时用Em这条反馈路径.
现构造新型非线性PID 控制器的参数:
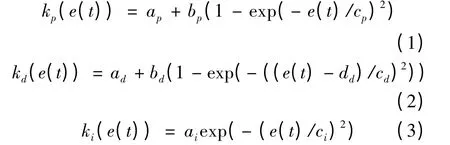
式(1)中:ap,bp,cp为常数.当时,kpmax=ap+bp;当ep=0 时,kpmin=ap;bp为kp的变化区间,cp是kp的变化速率;
式(2)中:ad,bd,cd,dd为正实数,其中kdmin=ad,kdmax=ad+bd,当e(t)=0 时,kd(e(t))=ad+bd(1-exp(-(dd/cd)2)),调整cd可调整kd的变化速率;
式(3)中:ki∈(0,ai),当e(t)=0 时,ki(e(t))=aiexp(-(0/ci)2)),ci决定ki的变化快慢.

图5 常规PID 控制图

图6 新型非线性PID 控制趋势图
参数kp,kd,ki的变化曲线如图4 所示.在图(a)中,当ep>0 时,kp与ep成正比例增大,使得系统过渡过程加快,同时也减小了稳态偏差.当ep<0 时,当|ep(t)|增大时,为了增大反向控制作用,减小稳态偏差,kp应增大;当|ep(t)|减小时,为使系统尽快回到稳态值,kp应减小.
由图(b)中可知,当系统的偏差增加时,kd增大,有效减小动态偏差,缩短调节时间.
由图(c)可知,当e(t)较大时,ki不要太大,以防引起调节过程振荡;而当e(t)较小时,ki增大,消除系统的稳态偏差,实现无差调节.
新型控制器的控制输出为:
由式(4)知,kp,kd,ki能够随e(t)变化而变化,所以其抗干扰能力也比传统PID 控制器强[7].如果kp,kd,ki选择适当的话,就能提高控制系统的控制品质,使控制系统达到稳、快、准的目标.
3 应用结果
本文针对某综合污水处理厂,根据V 型滤池液位控制系统的特点及污垢堵结,加入一个正弦抖振信号(幅值为0.2mm,频率为2Hz)进行实践应用.结果如图5,图6 所示.图5 为常规PID 控制图,图6 为新型非线性PID 控制的趋势图.由图5可知,V 型滤池液位偏差可达10cm 左右,即常规PID 控制器对纯滞后所引起的系统不稳定没有很好的抑制效果.由图6 可知,V 型滤池液位偏差最大达3cm,即新型控制策略可以减小环境因素的干扰对液位波动的影响,也可以很好地抑制纯滞后所带来的系统的不稳定性.
4 结 论
本文阐述了V 型滤池液位控制的特点和影响液位稳定的影响因素.针对V 型滤池液位控制问题,提出了一种新型控制方案——基于非线性PID的Smith 滞后补偿控制,并以某综合污水处理厂1#滤池为对象,将其应用于生产过程,达到了较好的动态控制效果,有效地提高了V 型滤池恒水位控制能力.
[1] 胡志生.PID 调节与V 型滤池恒水位控制[J].微计算机信息,2012,28(9):103-104,292.
[2] 张奇,许金萍,等.基于V 型滤池的净水厂自动控制系统设计[J].工业控制计算机,2011,24(5):39-42.
[3] 尚宏,陈志敏,任永平.一种新型非线性PID 控制器及其参数设计[J].控制理论与应用,2009,26(4):339-440.
[4] 焦晓红,方一鸣,吴晓明.连铸结晶器振动位置环的非线性PID 控制器设计及应用[J].自动化仪表,2001,22(7):4-5.
[5] M.R Mantausek,A.D Micic,A Modified Smith Predictor for Controlling Process with an Integrator and Long Dead-time[J],IEEE Tran,1996,41(6):1199-1203.
[6] 刘金琨.先进PID 控制MATLAB 仿真[M].北京:电子工业出版社,2006.79-80:288-299.
[7] 章家岩,马中海,等.Smith 预估补偿控制策略在转炉煤气回收系统中的应用[J].仪器仪表学报,2011,32(3):628-632.
[8] Kuc T Y,Han W G.An adaptive PID Learning Control of Robot Manipulators[J].Automatica,2000,36:717-725.
猜你喜欢
化工管理(2022年14期)2022-12-02
矿山安全信息(2022年22期)2022-11-24
供水技术(2020年6期)2020-03-17
制造技术与机床(2017年6期)2018-01-19
当代化工研究(2016年2期)2016-03-20
环境科技(2015年6期)2015-11-08
环境科技(2015年6期)2015-11-08
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01
上海金属(2013年4期)2013-12-20