基于前驱动桥式后轮毂式分布式驱动电动汽车整车设计研究①
2015-04-13 02:28熊璐,傅稳
佳木斯大学学报(自然科学版) 2015年4期
熊 璐,傅 稳
(同济大学中德学院,上海201804;同济大学新能源汽车工程中心,上海201804)
0 引 言
面对燃油汽车尾气排放造成的污染及对石油资源的过度消耗引发的能源问题,电动汽车已经成为国际汽车工业发展的“热点”之一.电机控制器对于电机的转矩控制更精确,电机的响应时间是内燃机和液压系统的1/100 到1/10[1].这使得电机驱动容易实现高性能的一体化TCS/ABS.
1 基于前轮边后轮毂的分布式驱动电动汽车参数匹配
分布式驱动电动汽车引入了多驱动源,车辆前后轴的驱动参数匹配是分布式驱动系统的核心技术.针对前驱动桥式后轮毂的分布式驱动电动汽车进行整车动力性能参数匹配.四驱平台车基于荣威E50 改制而来.目标平台车的指标参数如表1 所示.

表1 分布式驱动平台车项目指标
1.1 整车功率需求
1.1.1 根据最大车速选择最大驱动功率
车辆在水平良好路面上,以最高车速匀速行驶,坡道阻力和加速阻力为零,由功率平衡方程可得:

满载时,
1.1.2 根据纯电动汽车的加速性能选择
车辆在水平高附路面全油门加速,百公里加速时间为11s,行驶阻力由滚动阻力、加速阻力以及空气阻力构成.
满载时,
1.1.3 根据爬坡性能选择
假设车辆以某一恒定车速匀速ua爬坡行驶,车辆的加速阻力和空气阻力为零.此时需要消耗的功率为:

满载时,

驱动电机的峰值功率为:


图1 网络拓扑架构
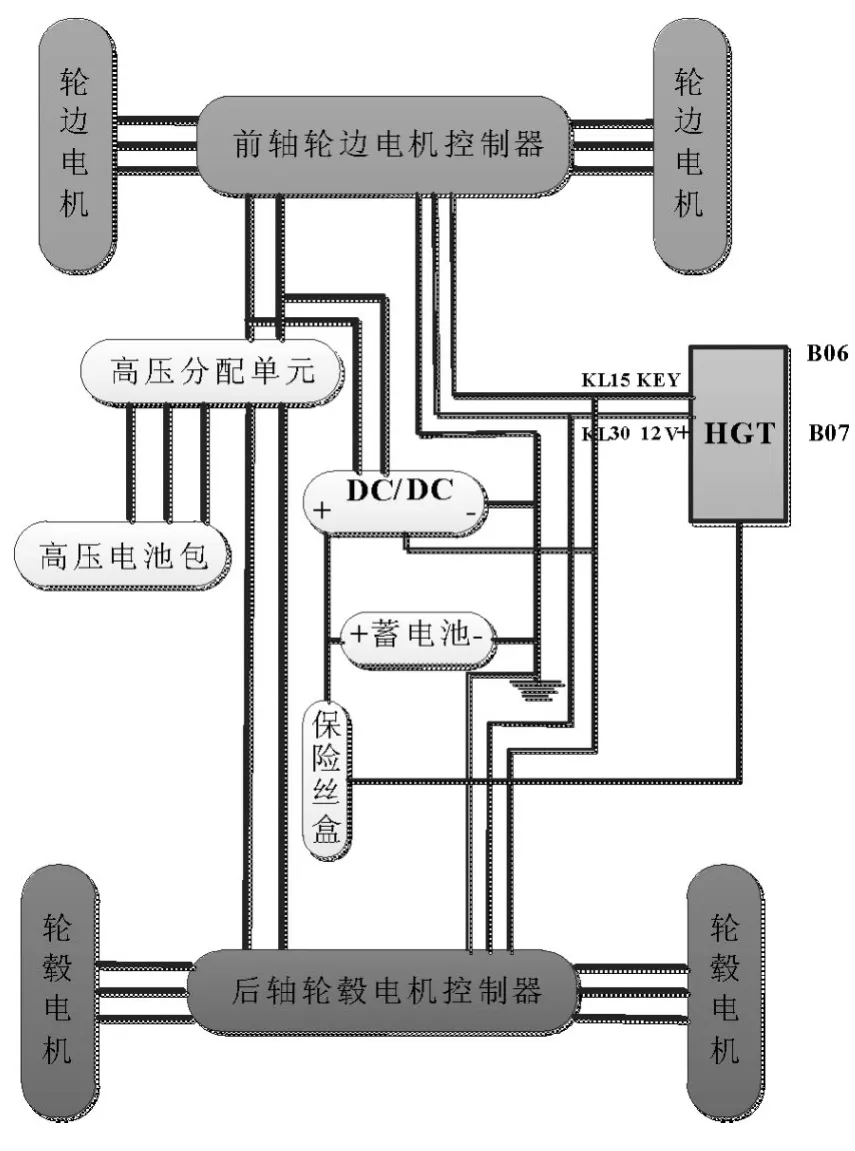
图2 高低压电气架构
1.2 理想四驱动力系统
由于目标平台车是四轮驱动的平台车,因此要对车辆前、后轴电机参数进行匹配.类似于制动力分配I 曲线,对于驱动系统也存在驱动力分配I 曲线.

式中,Ft_r,Ft_f为前后轴驱动力,a,b 为质心到前后轴的距离,L 为轴距,hg为质心高度,与制动力分配时一样,驱动力分配同样也存在所谓的f 组线和r 组线.
这里绘制驱动力I 曲线时,假设b=L/2,L=2305mm,并取质心高度hg=0.525m.
平台车动力系统的需求主要体现在起步加速上,由于平台车空间受限,因此将起步加速度设为0.4g.则车辆前后轴驱动力需求为:

联立方程,求得Ft_f=2126.3N,Ft_r=3073.7N
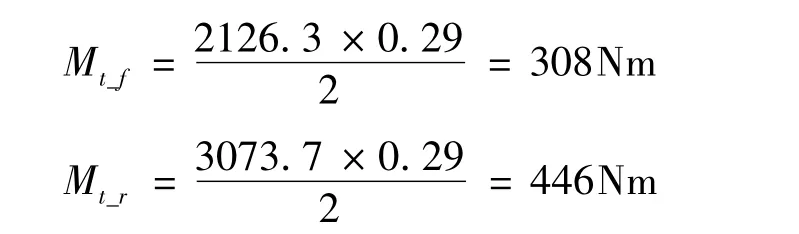
根据前后轴的驱动力需求,可以得出前后轴的驱动力矩,进一步计算出所需电机的扭矩.轮胎型号为185/55R15,车轮自由半径为0.29m.
则前轴和后轴单个驱动轮驱动力矩为:
根据式以9550P=T×n 及电机外特性易知,电机的最大功率在电机最大外特性的转折点处,其中转折点转速为n转.则有:

将上述式带入,令过载系数X =3,vmax=140km/h,R=0.29m,化简得:

则前轴单个电机最大功率为Pmax′ =14.5kW取整为15kW.后轴单个电机功率为Pmax″=21kW,取整后为20kW.
整车动力输出为Pmax=2(pmax′+pmax″)=70kW,与整车功率需求相符.
以上为理想驱动工况下即四个驱动轮均不滑转情况下前后轴电机的性能参数.但是实际无法找到一款集成于后轮轮辋空间内的446Nm 以及20kW 的轮毂电机.因此对前后轴电机参数进行重新匹配设计.前后轴电机的匹配选型必须在动力参数性能上和整车布置可行性上实现权衡.经过选型匹配,前后轴驱动系统参数见表2.整车的功率为65kW.

表2 前后轴电机参数
减速器的减速比应该满足最高车速以及爬坡度的要求,即使:

将nmax=9000r/min,vmax=140km/h 带入,得到4.3 <i减≤7.02
参考原车E50 的减速比,减速器定为6.2.
2 基于前轮边后轮毂的分布式驱动电动汽车电气架构构建
整车电气架构由网络拓扑架构及高低压电气架构构成.网络拓扑架构如图1 所示,其中HGT 网关负责将车载传感器信息如油门/制动踏板、方向盘转角等感器信息等传递给Autobox,Autobox 会根据车辆运行状态以及控制算法的需求分配四轮控制力矩.高低压电气架构如图2 所示,DC/DC 是整车低压供电单元的核心,整车低压照明、控制器供电以及低压执行单元通过DC/DC 的变压作用提供低压功率,DC/DC 的功率为1.8kW.
3 实车试验
图3 为实车动力性能指标实车实验数据,在30s 时试验车辆已经达到了143.9km/h.车辆百公里加速时间为11.37s.基本满足了设计要求.
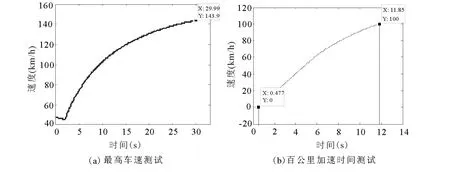
图3 力性能测试
4 结 论
利用驱动力分配I 曲线对前驱动桥式后轮毂式分布式驱动电动汽车进行参数匹配并且制定了整车的电气架构,其中包括网络拓扑架构和高低压电气架构,为分布式驱动电动汽车整车设计提供了理论依据.
[1] 余卓平,姜炜,张立军.四轮轮毂电机驱动电动汽车扭矩分配控制[J].同济大学学报,2008,36(08):1115-1119.
[2] 杨养户.电动汽车轮毂电机技术[J].汽车维修,2012,3:44-47.
[3] 周飞鲲.纯电动汽车动力系统参数匹配及整车控制策略研究[D].长春:吉林大学,2013.
[4] 李芳,张俊智,王丽芳,等.电动汽车动力总成系统控制器局域网(CAN)总线通信协议[J].机械工程学报,2008,44(5):102-107.
[5] 李田田,金启前,冯擎峰.纯电动汽车高压电气架构的设计[J].汽车工程师,2013,11:49-51.
[6] 余志生,主编.汽车理论.第五版[M].北京:机械工业出版社,2012,130-202.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
上海涂料(2021年5期)2022-01-15
中国外汇(2019年9期)2019-07-13
家庭影院技术(2018年9期)2018-11-02
现代企业文化(2018年13期)2018-06-09
家庭影院技术(2018年3期)2018-05-09
制造技术与机床(2017年10期)2017-11-28
制造业自动化(2017年2期)2017-03-20
大型铸锻件(2015年1期)2016-01-12
噪声与振动控制(2015年4期)2015-01-01