不同土壤环境下螺旋叶片驱动扭矩实验研究①
2015-04-13 02:28:34任文博冯晓明颜兵兵殷宝麟
佳木斯大学学报(自然科学版) 2015年2期
任文博,冯晓明,颜兵兵,殷宝麟
(佳木斯大学 机械工程学院,黑龙江 佳木斯154007)
0 引 言
自“中旭1 轮”成功打捞后,我国交通运输部海事局正式启动以公共航行安全为目的的“碧海行动”,沉船打捞再次成为热点问题[1~2].攻打千斤洞作为打捞沉船的一项关键工序至今仍为人工作业,使得打捞工作效率低下.拱泥机器人[3~5]是我国学者为代替人工攻打千斤洞设计的一个机器人,但现有拱泥机器人多为仿蚯蚓蠕动的作业方式,至今尚无工程样机问世,本文提出一种螺旋式前进的拱泥机器人设计方案,方案中螺旋式拱泥机器人可通过左旋和右旋螺旋叶片的相反方向旋转产生方向一致的轴向驱动力而前进.选取螺旋式拱泥机器人主要零部件螺旋叶片为研究对象,进行在两种不同土壤环境下螺旋叶片驱动扭矩随着叶片结构参数的实验变化规律,为后续研制螺旋式拱泥机器人奠定了实验基础.

图1 实验平台结构示意图
1 实验平台
由于需要保证螺旋叶片在工作状态下无轴向力,设计了一套实验平台,实验平台主要包括步进电机,电机驱动器,单片机控制板,螺旋叶片,AMPCI9110 数据采集卡,土槽,轴,联轴器,滑轨,扭矩传感器,电源等.通过使用滑块与滑轨尽量减小了轴向阻力对实验的影响,同时通过扭矩传感器可实时检测螺旋叶片工作时扭矩,通过数据采集卡及上位机可实现实时观测扭矩变化情况,同时可将采集数据进行数据分析,达到试验目的,整套实验平台示意图如图1 所示.
2 驱动扭矩实验比较分析
利用图1 所示的实验平台,对螺旋叶片在粉土和砂土中工作时的驱动扭矩Me 随螺旋叶片结构参数特性的变化规律进行一系列实验比较研究,实验所用部分螺旋叶片结构参数如表1 所示,其中D 为螺旋叶片外径,d 为内径,S 为螺距,定义螺旋叶片的宽度为W(W=(D-d)/2),螺旋叶片转速均为20r/min,实验所用两种土壤为粉土与砂土,土壤力学指标[6]如表2 所示.
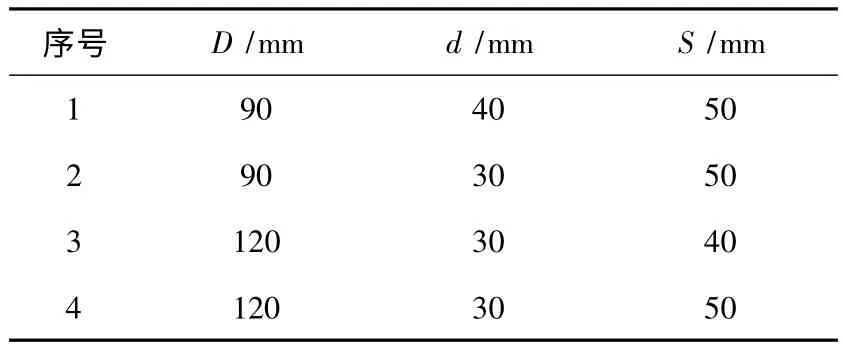
表1 螺旋叶片结构参数表

表2 土壤力学指标
图2 给出了粉土和砂土中螺旋叶片驱动扭矩Me 随外径D 的变化规律,由图可知,在粉土和砂土中螺旋叶片驱动扭矩Me 随着外径D 的增大而增大,但相同的叶片在粉土中所需驱动扭矩更大.

图2 Me 随D 变化规律图
图3 给出了粉土和砂土中螺旋叶片驱动扭矩Me 随内径d 的变化规律,由图可知,在粉土和砂土中螺旋叶片驱动扭矩Me 随着内径d 的增大而减小.
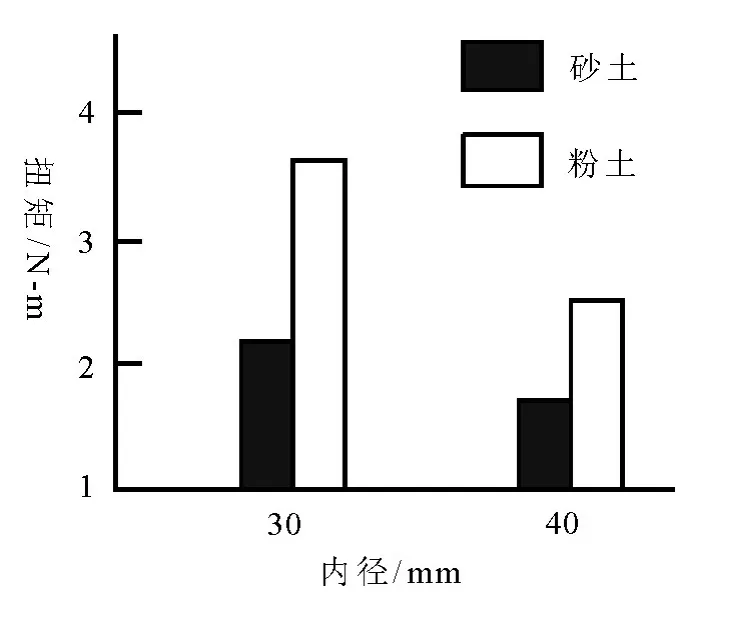
图3 Me 随d 变化规律图
图4 给出了粉土和砂土中螺旋叶片驱动扭矩Me 随螺距S 的变化规律,由图可知,在粉土和砂土中螺旋叶片驱动扭矩Me 随着螺距S 的增大而减小.

图4 Me 随S 变化规律图
综合图2,图3 可以看出螺旋叶片外径D 越大,内径d 越小,所需驱动扭矩越大,即螺旋叶片宽度W 越大所需驱动扭矩越大,综合图2 到图4 可知,在不同工作环境下驱动扭矩随着结构参数变化规律相似,同种叶片在粉土工作环境下所需驱动力更大.
3 结 论
本文首先根据螺旋叶片的工作需要设计并搭建了一种动力学实验平台,其次利用实验平台,对螺旋叶片在粉土及砂土环境中,螺旋叶片所需驱动扭矩进行实验比较研究,研究表明,螺旋叶片在不同工作环境下驱动扭矩随着结构参数变化规律基本相似,螺旋叶片宽度W 越大,螺距S 越大所需驱动扭矩越大,为后续研究螺旋式拱泥机器人奠定了基础.
[1] 刘艳利.渤海湾沉船打捞进行时[J].中国海事,2013(10):6-9.
[2] 赵远哲.“碧海行动”:破冰沉船打捞困境[J].中国海事,2013(10):10-12.
[3] 魏洪兴,王立权,袁鹏,等.基于蠕动原理拱泥机器人的海洋土力学模型研究[J].哈尔滨工程大学学报,2000(4):36-40.
[4] 李燕.仿蚯蚓在土质环境下拱洞机器人的研究[D].西安:西北工业大学,2004.
[5] 颜兵兵.拱泥仿生机器人系统设计及其虚拟样机研究[D].哈尔滨:哈尔滨理工大学.2008.05.
[6] 常士骠,张苏民.工程地质手册[M].北京:中国建筑工业出版社,2006.
猜你喜欢
石油沥青(2023年5期)2023-12-08 08:35:16
科学技术与工程(2022年17期)2022-07-28 07:47:40
水道港口(2021年3期)2021-08-24 07:08:40
黑龙江水利科技(2020年8期)2021-01-21 09:27:12
陶瓷科学与艺术(2019年3期)2019-07-26 00:44:32
读者·校园版(2016年19期)2016-09-21 11:51:51
科教导刊·电子版(2016年16期)2016-07-18 18:40:06
科技视界(2016年6期)2016-07-12 12:27:41
中国铁道科学(2015年1期)2015-06-26 08:33:46
山西大同大学学报(自然科学版)(2015年1期)2015-01-22 07:14:17