ISG混合动力汽车控制规则优化与转矩分配策略研究*
2015-04-12 05:08周奇勋曹世宏季新杰
汽车工程 2015年7期
周奇勋, 曹世宏, 季新杰
(1. 西安科技大学电气与控制工程学院,西安 710054; 2. 总后勤部建筑工程研究所,西安 710032; 3. 西北工业大学机电学院,西安 710072; 4. 空军第一航空学院航空弹药工程系,信阳 464000)
2015131
ISG混合动力汽车控制规则优化与转矩分配策略研究*
周奇勋, 曹世宏, 季新杰
(1. 西安科技大学电气与控制工程学院,西安 710054; 2. 总后勤部建筑工程研究所,西安 710032; 3. 西北工业大学机电学院,西安 710072; 4. 空军第一航空学院航空弹药工程系,信阳 464000)
为提高ISG混合动力汽车的燃油经济性,开展控制规则优化与转矩分配策略研究,以保证发动机工作在高效区域。从控制发动机输出负荷角度出发,综合考虑ISG效率特性和电池组充放电特性,对发动机、ISG、电池组稳态工作区域进行划分。以混合动力系统工作模式分析为基础,提出各模式下能量管理策略,并根据车辆行驶过程中工作模式动态切换的需要,制定了模式切换策略。以IVECO并联混合动力汽车为例,按照ECE+EUDC工况进行了基于优化规则的转矩分配策略硬件在环仿真,结果表明采用基地规则的转矩分配策略能有效地协调转矩在发动机和ISG之间的分配,综合油耗比原车降低20%。
混合动力汽车;ISG;规则优化;转矩分配策略
前言
为提高混合动力汽车燃油经济性,除了采用改善整车机械结构和提高参数匹配的方法之外,对混合动力系统控制策略进行优化也是一条重要途径。混合动力系统控制策略主要包括能量管理策略、工作模式划分和转矩分配策略[1],其关键思想在于根据行驶工况需求,对混合动力系统多能源进行实时合理分配,以保证发动机燃油消耗最低及电池电量平衡。
混合动力系统部件如发动机、集成一体化起动机/发电机(integrated starter generator or integrated starter alternator,ISG or ISA,下文以ISG出现)、离合器及变速器等的工作状态在车辆行驶过程中随工况动态变化,整车运行特性复杂,控制难度大[2]。近年来,关于控制策略研究的文献主要分为两类[3-4]:优化控制策略和规则控制策略。优化控制策略的核心在于复杂的优化算法,考虑到目前混合动力系统控制器有限的运算能力,优化算法难以完成实时控制[5];规则控制策略是静态基线控制策略的一种,具有算法简单、易实现、鲁棒性好的特点,但其系统性能对规则的调整依赖性强[6]。本文中从控制发动机输出负荷的角度出发,综合考虑ISG效率特性和电池组的充放电特性,对发动机、ISG、电池组稳态高效工作区域规则优化进行分析;制定模式管理策略,实现车辆行驶中工作模式动态切换;依据优化规则提出使混合动力系统始终工作于高效工作区的转矩分配控制策略,以获得整车最佳燃油经济性。
1 能量管理策略
1.1 转矩需求分析
在ISG混合动力汽车行驶过程中,转矩请求由加速踏板对应的发动机输出转矩、制动踏板对应的制动转矩和ISG输出转矩3部分构成,即
Treq=Te+Tb+TISG
(1)
式中:Treq为驾驶员的转矩请求;Te为发动机提供的转矩;Tb为制动转矩;TISG为ISG提供的驱动转矩或发电转矩。
根据式(1),混合动力系统转矩特性取决于发动机和ISG的转矩特性。以IVECOHEV为例,在已知发动机和ISG转矩特性时,混合动力系统的转矩特性如图1所示。从图中可以看出,当车速超过发动机最低稳定工作转速1 000r/min时,系统的转矩特性由发动机和ISG转矩特性复合而成。
1.2 发动机优化工作区划分
规则控制策略必须保证两个原则:控制电池组SOC在一定范围,高效利用其能量,并保证其不被过度充放电而使寿命降低;在满足车辆行驶转矩需求的条件下,通过利用ISG工作范围广、效率高的特性控制其转矩,对发动机转矩进行补偿,调整发动机工作点落于高效工作区,从而提高整车燃油经济性。不同控制策略的电池SOC的管理模式有两种[7-9]:一种是设置电池充电停止门限最高荷电状态SH和电池放电停止门限最小荷电状态SL,控制SOC在这一范围内变化,当电池SOC低于SL时,启动对电池组的充电过程,保证电池组不被过分放电,当电池SOC高于SH时,停止对电池组充电,保证电池组不被过度充电,这种策略称为CD(charge depleting)控制策略;另外一种方法是设置SOC控制目标,在车辆行驶过程中,SOC始终在设定目标附近,称为CS(charge sustaining)控制策略。本文中采用CD控制策略,则
SL≤SOC≤SH
(2)
发动机控制的原则是尽可能使其工作于经济工作区,因此,须对发动机运行区域进行划分,找出其优化工作区是制定控制策略的一个关键。图2为MG1.8发动机工作区域划分图,3条关键控制线将发动机运行区域分割成4个区域:发动机最大转矩工作线Temax、发动机经济工作区下限Teoff、发动机最低稳定转速工作线nemin和处于3条界限之间的区域即发动机经济工作区。
2 模式管理策略
2.1 工作模式分析
混合动力系统有两个能量变换器:发动机和ISG,它们分别将燃油能量和电池组能量转换为整车驱动力。因此,系统中能量流动的路径有两个:发动机驱动系和电力驱动系,其中发动机驱动系是单向驱动系,电力驱动系是双向驱动系(电动状态和发电状态)。对于每个驱动系,能量变换器的工作状态就相应地对应着该驱动系能量流动方向。发动机有驱动和停机两种工作状态。ISG有电动、发电和停机3种工作状态。发动机和ISG的工作状态的组合就是整车工作模式。因此,根据实际情况,ISG混合动力汽车有10种可能的工作模式。表1给出了10种可能的工作模式及其对应的能量流动路线。
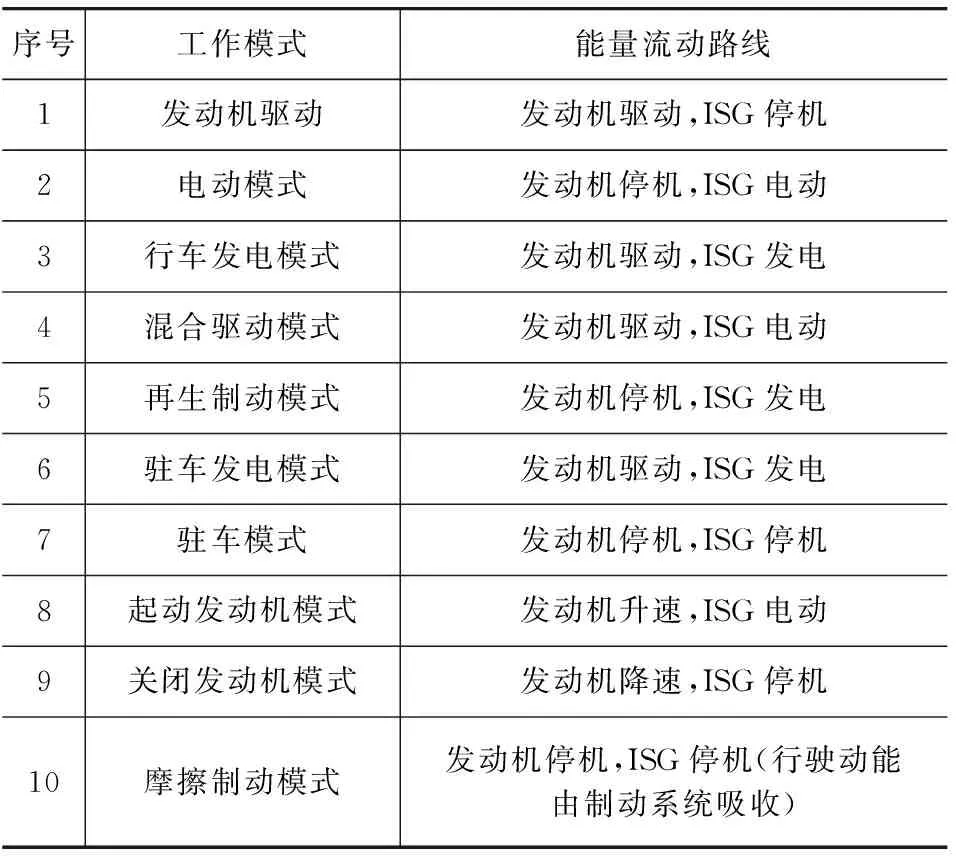
表1 ISG混合动力汽车工作模式及能量流动路线
2.2 运行区域划分
工作模式的运行区域根据发动机关键控制线进行划分,如图3所示。
2.2.1SOC≥SL情况
当SOC≥SL时,从图4中可以看出工作模式的分布情况及判定条件,如表2所示。
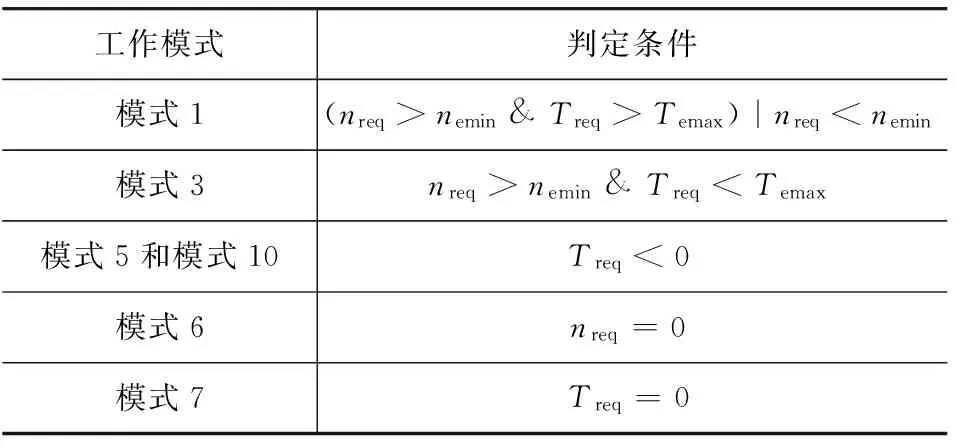
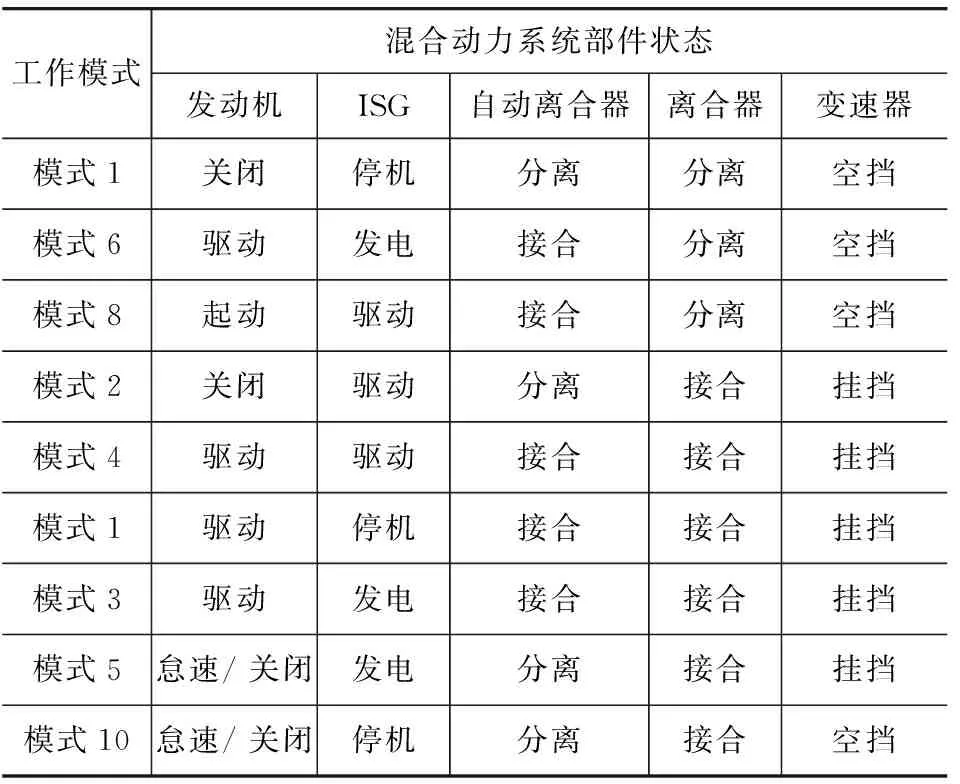
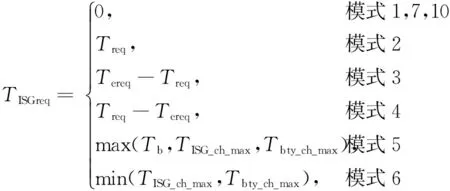
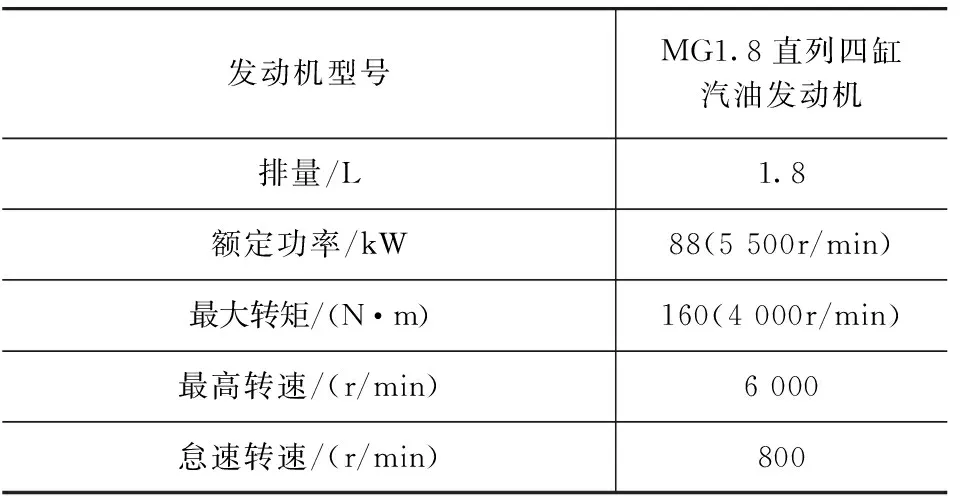
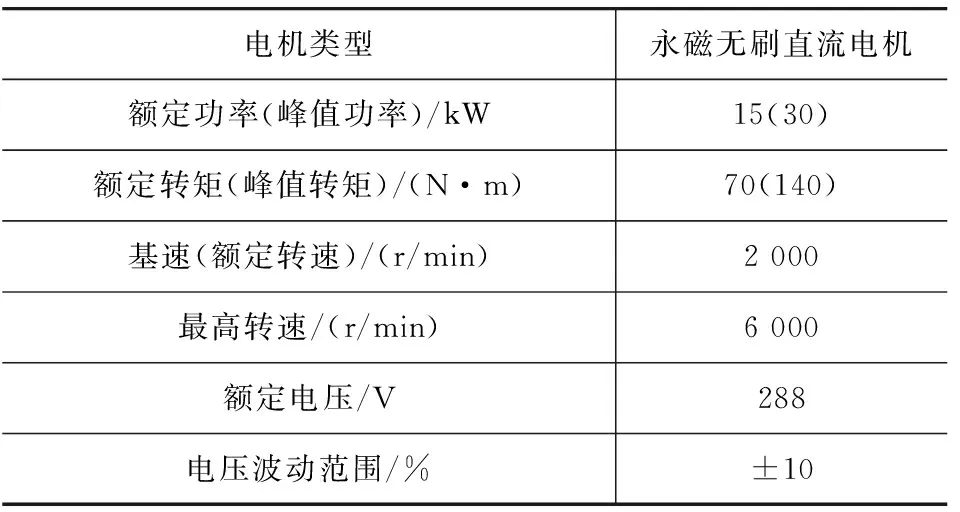
2.2.2SOC 当SOC 工作模式判定条件模式1nreq>nemin&Teoff 表3 SOC 2.3 工作模式切换规则 ISG混合传动系统结构框图如图4所示。上层的车辆控制器汇集来自驾驶员和所有部件的数据,基于这些数据和控制策略,向各部件控制器发送控制指令。下层部件控制器则根据车辆控制器的控制指令控制相应部件的运行状态,以满足整车驱动的要求。 根据混合传动系统结构,ISG混合动力汽车工作模式随着运行工况的变化在不同模式间不断切换,其切换规则如图5所示。 不同工作模式下,混合动力系统部件的运行状态也随之发生改变。不同工作模式下混合动力系统部件的状态如表4所示。 表4 ISG混合动力汽车工作模式与部件运行状态分析表 确定动力源的工作区域和工作模式切换规则以后,需要确定发动机、ISG的目标转矩和制动系统的目标转矩。下面将分别讨论不同工作模式下的转矩分配问题。 4.1 发动机的目标转矩 发动机目标转矩是指确定不同工作模式下发动机输出转矩Tereq。由表1可知,在电动模式(模式2)、再生制动模式(模式5)、驻车模式(模式7)、摩擦制动模式(模式10)下,发动机停机,因此目标转矩为0。在发动机驱动模式(模式1)下,发动机目标转矩即为需求转矩;在行车发电模式(模式3)下,发动机目标转矩同时受ISG和电池组充电能力以及当前转速对应的最大输出转矩的影响;在混合驱动模式(模式4)下,发动机目标转矩为最大转矩;在驻车发电模式(模式6)下,发动机目标转矩即为发电转矩,它受到ISG最大发电能力和电池组最大充电能力限制。不同工作模式下,发动机的目标转矩为 (3) 式中:TISG_ch_max为ISG工作于发电机状态时的最大发电转矩;Tbty_ch_max为电池组最大允许充电转矩;Tereq为发动机目标转矩。 3.2 ISG的目标转矩 在7个稳态工作模式中,模式1、模式7和模式10中,ISG不工作,目标转矩为0。模式2中,ISG单独驱动车辆,转矩请求由ISG单独提供。模式3中,发动机驱动车辆并带动ISG发电,向电池组充电,ISG目标转矩是发动机目标转矩减去需求转矩。模式4中,发动机和ISG混合驱动,ISG目标转矩为需求转矩减去发动机目标转矩。模式5中,ISG回收制动能量,ISG目标转矩为制动转矩、ISG最大充电转矩和电池组最大允许充电转矩中的最小值。模式6中,车辆转矩请求为0,但发动机目标转矩全部用来发电,则ISG目标转矩即为发动机目标转矩。不同工作模式下,ISG的目标转矩为 (4) 式中TISGreq为ISG目标转矩。 3.3 制动系统目标转矩 制动系统仅在摩擦制动模式(模式10)工作。在实际工作过程中,ISG工作于再生制动模式和制动系统联合工作构成了车辆的制动系统。因此,制动系统的目标转矩应该是需求转矩减去ISG的目标转矩,即 (5) 式中Tbreq为制动系统目标转矩,该转矩由制动踏板控制。 为确定所制定的控制策略的有效性,采用IVECOECU与自行研制的ISG控制器,进行混合动力系统硬件在环试验验证,其中IVECO混合动力汽车用MG1.8发动机参数如表5所示,ISG参数如表6所示。 表5 发动机参数 表6 ISG技术参数 图6为初始SOC=0.7的试验结果。由图可见:由于SOC较高,根据控制策略,当需求转矩高于发动机最大输出能力时,ISG提供助力,否则ISG停止工作,保证了发动机工作于高效工作区,使整车的综合油耗降低;电池SOC随着工况变化,不断降低,并保持在合理范围。图7为初始SOC=0.4的试验结果。由图可见:由于电池SOC较低,整个仿真过程中,ISG多工作于发电状态,充电能量来自发动机,因而这个过程整车的油耗较高;随着充电过程的持续,电池SOC不断增大,并且保持在一定范围。从图6和图7还可以看出,期望车速曲线与实际车速曲线几乎重合。 图8和图9分别是初始SOC=0.7和SOC=0.4时,900~1 200s时间段内的转矩分配情况。从图中可以看出,发动机转矩和ISG转矩输出之和与需求转矩基本相同,表明控制策略根据驾驶员的转矩请求,充分协调了转矩请求在发动机和ISG之间的分配。 图10为初始SOC=0.7时发动机工作点分布图。由图可见,发动机大部分时间工作于高效工作区,表明控制策略达到了控制发动机工作于高效工作区的目的。 IVECO原车100km综合油耗约为12L,改装成混合动力汽车后,其100km综合油耗仿真结果为9.6L,与原车相比,在保证动力性基础上,油耗降低了20%。综合以上几个方面的试验分析结果,表明本文研究的控制策略切实有效。 (1)提出的转矩分配策略能合理地在发动机和电池之间进行功率分配以满足驱动功率的需求,而且电池的SOC能够在一定范围内保持有效的平衡,其变化趋势符合预期控制效果;发动机的工作点运行于高效区域内。 (2)在整车燃油经济性方面,该新型并联式混合动力客车采用基于规则的转矩分配策略,单位油耗降低了20%。 [1] Yi T, Xin Z, Liang Z. Fuzzy-Genetic Control Strategy of Hybrid Electric Vehicle[C]. Proceedings of the 2009 Second International Conference on Intelligent Computation Technology and Automation, 2009: 720-723. [2] Bedir A, Alouani A T. A Simple Power Based Control Strategy for Hybrid Electric Vehicles[C]. Proceedings of the IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, 2009: 803-807. [3] Hofman T, Steinbuch M, Van Druten R, et al. Rule-based Energy Management Strategies for Hybrid Vehicles[J]. International Journal of Electric and Hybrid Vehicles,2007, 1(1): 71-94. [4] Aymeric Rousseau, Sylvain Pagerit, David Gao. Plug-in Hybrid Electric Vehicle Control Strategy Parameter Optimization[J]. Journal of Asian Electric Vehicle, 2008, 6(2): 1125-1133. [5] 林歆悠, 孙冬野. 新型混联式混合动力客车实时优化控制策略[J]. 中国公路学报, 2012,25(5): 152-158. [6] Zhong H, Wang F, Ao G Q, et al. An Optimal Torque Distribution Strategy for an Integrated Starter-Generator Parallel Hybrid Electric Vehicle Based on Fuzzy Logic Control[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2008, 222(1): 79-92. [7] 季新杰, 李声晋, 方宗德. 单轴并联式混合动力汽车动力系统参数匹配的研究[J]. 汽车工程, 2011,33(3):188-193. [8] Antoni Szumanowski, Chang Yuhua. Battery Management System Based on Battery Nonlinear Dynamics Modeling[J]. IEEE Transactions on Vehicular Technology, 2008, 57(3): 1425-1432. [9] Gonder J, Markel T. Energy Management Strategies for Plug-In Hybrid Electric Vehicles[C]. SAE Paper 2007-01-0290. A Research on the Control Rules Optimization and Torque Distribution Strategy for ISG Hybrid Electric Vehicles Zhou Qixun1,2,3, Cao Shihong2& Ji Xinjie4 1.DepartmentofElectrical&ControlEngineering,Xi’anUniversityofScienceandTechnology,Xi’an710054; 2.Xi’anConstructionEngineeringResearchInstitue,Xi’an710032; 3.SchoolofMechatronicsEngineering,NorthwesternPolytechnicalUniversity,Xi’an710072; 4.DepartmentofAviationAmmunitionEngineering,theFirstAviationAcademyofChineseAirForce,Xinyang464000 In order to enhance the fuel economy of ISG hybrid electric vehicle, the control rule optimization and torque distribution strategy are studied for ensuring engine working in high efficiency regions. Firstly from a point of view of regulating engine output load and concurrently considering ISG efficiency characteristic and battery charge / discharge characteristics, the steady working regions of engine, ISG and battery pack are divided. Then the energy management strategies for different working modes are proposed based on the working mode analyses of hybrid powertrain, and the mode switching strategy is worked out according to the requirement of dynamic switching of working modes in vehicle driving process. Finally a hardware-in-the-loop simulation for torque distribution strategy based on optimized rule is conducted on an IVECO parallel hybrid electric vehicle with ECE+EUDC driving circle. The results show that the rule-based torque distribution strategy adopted can effectively coordinate the torque distribution between engine and ISG with its overall fuel consumption reducing by 20% compared with original vehicle. HEV;ISG;rule optimization;torque distribution strategy *国家自然科学基金(51307137)和中国博士后基金(2014M552618)资助。 原稿收到日期为2013年9月5日,修改稿收到日期为2013年12月23日。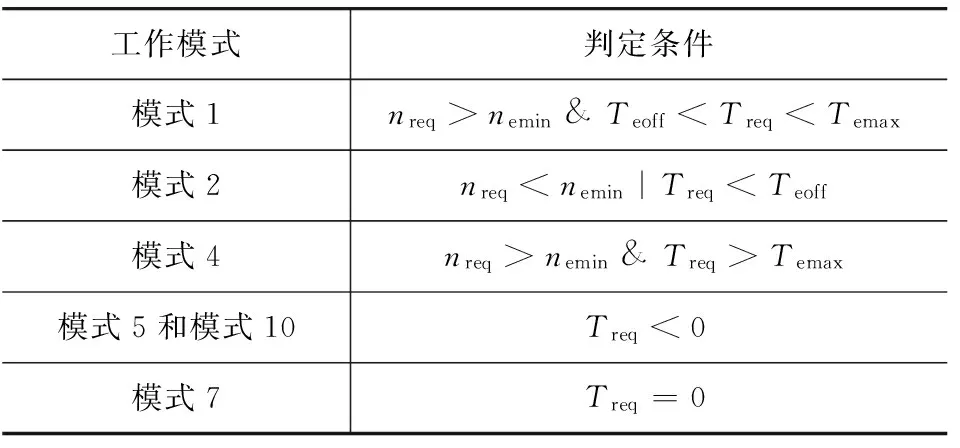
4 转矩分配策略

4 硬件在环试验
5 结论
猜你喜欢
汽车实用技术(2022年15期)2022-08-19能源工程(2022年2期)2022-05-23防爆电机(2022年2期)2022-04-26昆明医科大学学报(2021年12期)2021-12-30防爆电机(2021年5期)2021-11-04建材发展导向(2021年11期)2021-07-28汽车维修与保养(2020年11期)2020-06-09电机与控制学报(2018年9期)2018-05-14电机与控制学报(2018年9期)2018-05-14汽车文摘(2017年5期)2017-12-05