
基于混杂系统理论的混合动力汽车驱制动控制研究*
2015-04-12 09:27尹安东路瑞刚
汽车工程 2015年10期
尹安东,赵 韩,孙 骏,路瑞刚
(1.合肥工业大学机械与汽车工程学院,合肥 230009; 2.汽车技术与装备国家地方联合工程研究中心,合肥 230009;3.中国汽车工程学会,北京 100055)
2015196
基于混杂系统理论的混合动力汽车驱制动控制研究*
尹安东1,2,赵 韩1,2,孙 骏1,2,路瑞刚3
(1.合肥工业大学机械与汽车工程学院,合肥 230009; 2.汽车技术与装备国家地方联合工程研究中心,合肥 230009;3.中国汽车工程学会,北京 100055)
基于混杂系统理论,对后轮驱动混合动力汽车的动力系统进行分析,基于混杂自动机模型建立了HEV动力系统控制模型。提出了模式变换式驱动控制策略和制动力协调控制的再生制动控制策略。采用Simulink/Stateflow混合建模方法,建立了HEV动力系统控制策略仿真模型,并进行了实例HEV样车性能仿真和道路试验。结果表明:实例HEV性能满足设计要求;在中国典型城市公交循环工况下,与同类型传统汽车相比,燃料消耗量减少15.9%。
混合动力汽车;混杂系统理论;动力系统;再生制动;控制策略
前言
混合动力汽车(hybrid electric vehicle, HEV)由两个或两个以上的能量源提供动力,其动力系统的控制比传统汽车单一动力能源的控制复杂得多[1]。
HEV具有动力系统工作模式频繁切换和运行工况多变等特点,其动力系统控制是一个典型的混杂动态系统控制问题。混杂动态系统简称混杂系统(hybrid systems, HS),是由连续变量动态系统和离散变量动态系统相互混合、相互作用而形成的统一的动态系统[2],混杂动态系统理论(简称混杂系统理论)为解决混杂动态系统控制问题提供了理论基础[3-4]。本文中以某款后轮驱动的HEV为研究对象,基于混杂系统理论对HEV动力系统驱动和制动的控制进行研究,并在Simulink/Stateflow和Advisor平台上进行联合建模与分析。
1 HEV动力系统的分析
1.1 HEV动力系统的结构和运行模式
本文中所研究的HEV的动力系统结构如图1所示,该动力系统在不同的工况下具有不同的运行模式,包括纯电动驱动、发动机-发电机组驱动、混合驱动、充电(包括行车充电和停车充电)和再生制动等运行模式,且频繁切换。
1.2 HEV动力系统的特征分析
HEV动力系统的控制是根据各种传感器的检测信号,通过控制策略确定各总成部件(发动机-发电机组、电机、电池组)的工作状态和整车运行模式。其中检测信号是连续变化量,而整车的运行模式在运行过程中,要进行模式切换,属于离散事件。故HEV动力系统具有混杂系统特征。以往的经典控制理论和现代控制理论体系难以适用于混杂系统控制问题,而混杂系统理论为混杂系统的控制等提供了理论支撑,同时为具有混杂系统特征的HEV动力系统的控制研究提供了新途径。
2 基于混杂系统理论的HEV动力系 统描述
2.1 混杂系统理论模型
混杂系统的理论研究主要集中在混杂系统的建模、分析、控制和应用等方面。常用的混杂系统模型有混杂自动机模型(hybrid automaton model)和混合Petri网模型等[5]。其中,混杂自动机模型将描述连续动态行为的微分方程嵌入到传统的离散状态机模型中,使自动机模型兼备描述连续行为的能力,成为描述混杂系统的常见工具[6],其定义为
H=(Q,X,V,Y,Init,f,Inv,E,R,φ)
(1)
式中:H为混合状态空间;Q为有限离散状态变量集合,描述离散状态;X为连续状态变量集合,描述连续状态;V为有限的输入变量集合,含连续变量和离散变量;Y为输出变量集合,含连续变量和离散变量;Init为系统初始状态的集合;f为状态量和输入变量的微分或差分方程;Inv为给每个离散状态指定与连续变量X和输入变量V有关的不变集合;E为离散状态之间的离散事件集合;R为离散事件和指定状态切换后连续状态变量X的默认状态值;φ为给每个状态指定一个容许输入域。
混杂自动机模型可根据给定的混杂系统模型和性能指标,寻找可行的控制策略,保证被控系统满足给定的性能指标。
Matlab是混杂系统仿真研究中常用的工具,其中以有限状态机(finite state machine, FSM)为理论基础的Stateflow软件,允许使用流程图和状态转移的概念,能够虚拟建模和仿真离散变量动态系统,而Matlab/Simulink则可对连续变量动态系统及其与离散变量动态系统的接口进行建模和仿真,因此可采用Simulink/Stateflow混合建模方法,搭建连续变量动态系统和离散变量动态系统的建模仿真平台,来实现基于自动机模型的混杂系统的建模与仿真,从而为具有混杂系统特征的HEV动力系统控制、建模和仿真分析提供技术支持。
2.2 基于自动机模型的HEV动力系统模型描述
HEV动力系统具有明显的混杂系统特征,因此HEV动力系统控制模型可用混杂自动机模型(见式(1))来描述[7]。具体描述如下:
HEV的动力系统可包括6个状态:
q={q1,q2,q3,q4,q5,q6}∈Q
(2)
式中:q为离散状态变量;q1~q6分别为静止状态、停车充电状态、发动机-发电机组驱动状态、混合驱动状态、纯电动状态和再生制动状态。在HEV动力系统中:
(1) 连续状态变量为x={ωe,ωm}∈X,其中ωe和ωm分别为发动机转速和电机转速。
(2) 连续输入变量为vc={Pe,Pm(Pr),SOC}∈VC,其中Pe,Pm,Pr和SOC分别为发动机功率、电机功率、需求功率和电池荷电状态,VC为连续输入变量集合;离散输入变量为:vd={v1,v2}∈VD,其中v1表示发动机的开关状态,v2表示电池的充放电状态,VD为离散输入变量集合。
(3) 连续输出变量为yc={v,SOC,ωe,ωm}∈YC,包含车速v、电池荷电状态SOC、发动机转速ωe和电机转速ωm,YC为连续输出变量集合;离散输出变量为yd={braking/Yes/No}∈YD,表示汽车是否在制动状态。
(4)Init⊆Q×X为HEV动力系统的初始状态。
(5) 对于HEV动力系统来说,具体的不变集合Inv为
(3)
式中:Engine_on和Engine_off分别为发动机开启和关闭状态;Ess_on和Ess_off分别为电池放电和充电状态。
(6)E为离散状态模式之间的离散事件集合,对于HEV动力系统6个状态模式,确定可能切换的离散事件集合为E={e1,e2,…,e17},各状态模式之间的切换关系如图2所示。
图中,STOP(q1)为静止状态模式;IDLE(q2)为停车充电状态模式;ENGINE(q3)为发动机-发电机组驱动状态模式;ENG_BAT(q4)为混合驱动状态模式;BATTERY(q5)为纯电动状态模式;EnergyREC(q6)为再生制动状态模式;e1,e2,…,e17为各状态模式之间切换的离散事件。
(7)φ为给每个状态指定一个容许输入域,也就是定义了输入作用域。在HEV动力系统中,输入量发动机功率Pe、电机功率Pm和动力电池SOC值都有一定容许的取值范围。
由上述可知:对于具有混杂系统特征的HEV动力系统,控制输入量V和状态模式切换的离散事件E是HEV动力系统控制核心,因此设计合适的HEV动力系统驱动和制动控制策略,实现最佳的输入量和状态模式切换,并获得最优的动力系统的能量效率尤为必要。
3 HEV动力系统控制策略设计
3.1 模式变换式驱动控制策略设计
HEV动力系统通常有恒温器式和功率跟随式两种控制策略,两者各有优缺点。本文中设计了一种集恒温器式和功率跟随式控制策略优点的模式变换式驱动控制策略:当负载功率较小且SOC较高时,发动机被关闭,主要用纯电动模式;发动机在SOC较低或负载功率较大时均会启动,发动机带动发电机工作;当加速和爬坡时,采用功率跟随模式;当负载功率要求低时,采用恒温器模式,从而充分利用发动机和电池组的高效率区,使动力系统达到能量效率最优。所设计的模式变换式驱动控制策略的控制规则,如表1所示。
表中,On为发动机开启状态;Off为发动机关闭状态;Hold为发动机保持状态;Pr为整车需求功率;Pe为发动机功率;Pb为电池充放电功率,Pb<0为充电功率,Pb>0为放电功率;Popt为发动机最优工作点输出功率;SOCmin和SOCmax分别为电池组设定的最小、最大值;Pmin和Pmax为发动机最小和最大输出功率。其中Pr<0时系统处于制动状态,由再生制动控制模块控制。
3.2 协调控制的再生制动控制策略设计
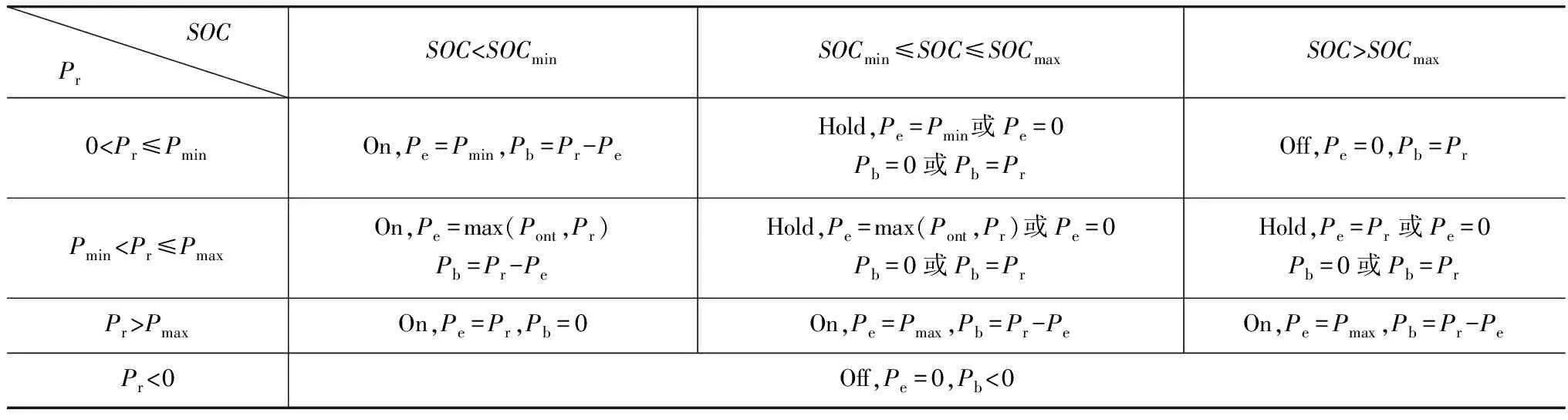
表1 模式变换式驱动控制策略的控制规则
如何分配前后轮制动器摩擦制动力和电机再生制动力,以提高整车的能量回收率和安全舒适性是HEV动力系统制动力分配策略研究的重点[8-9]。本文中在理想制动力分配策略的基础上,设计一种电机再生制动力、摩擦制动力和整车前后轮制动力协调控制的再生制动控制策略,并按制动强度的大小将HEV的制动分为3种模式:纯电机再生制动模式、复合制动模式(电机再生制动+摩擦制动)和传统摩擦制动模式。图3为某款HEV前后轮制动力分配曲线。图中,OA段,制动强度较小,系统处于纯电机再生制动模式;AB段,随着制动强度的增大,电机再生制动力不能满足驾驶员制动力需求,前后轮制动力分配点沿着AB线(r线)转移;随着制动强度继续增大,BC段的前后轮制动力分配点沿着理想制动力分配曲线(I曲线)转移。AB段和BC段,系统处于复合制动模式。到达C点后,前后轮制动力沿原制动系统β线上升,系统处于传统摩擦制动模式。
4 HEV动力系统控制策略建模
4.1 模式变换式驱动控制策略建模
基于混杂自动机模型的HEV动力系统描述(见式(1)~式(3))和有限状态机原理,根据表1所示的控制规则,利用Simulink/Stateflow仿真平台建立HEV动力系统模式变换式驱动控制策略仿真模型,其中基于混杂自动机模型的HEV动力系统的模式变换式驱动策略模式切换关系如图4所示。
4.2 协调控制的再生制动控制策略建模
基于混杂自动机模型的HEV动力系统描述(见式(1)~式(3))和HEV前后轮制动力分配曲线(图3),利用Simulink/Stateflow仿真平台建立后轮驱动HEV动力系统制动力协调控制的再生制动控制策略仿真模型,其中基于混杂自动机模型的HEV动力系统再生制动控制策略模式切换关系如图5所示。
图中共有5种状态模式:(1)较低制动强度(low_brake)的纯电机制动模式;(2)中等制动强度(mid_brake)的复合制动模式,前后轴制动力沿r线分配;(3)较高制动强度(high_brake)的复合制动模式,前后轴制动力按照I曲线分配;(4)紧急制动(emergency)的传统摩擦制动模式,前后轴制动力按β线分配;(5)非制动状态模式(no brake)z≤0。
5 实例HEV动力系统控制的仿真
5.1 HEV整车仿真模型的建立
首先利用Simulink建立发动机、电机和动力电池组等主要部件的仿真模型,然后将基于Simulink/Stateflow所建立的基于混杂自动机模型的HEV动力系统模式变换式驱动控制策略仿真模型和制动力协调控制的再生制动控制策略仿真模型嵌入到Advisor(advanced vehicle simulator)的控制策略仿真模块中,得到HEV整车仿真模型如图6所示。
5.2 基于循环工况的实例HEV仿真
实例HEV样车是全承载式传统燃油城市公交车改装而成,其主要参数如表2所示。
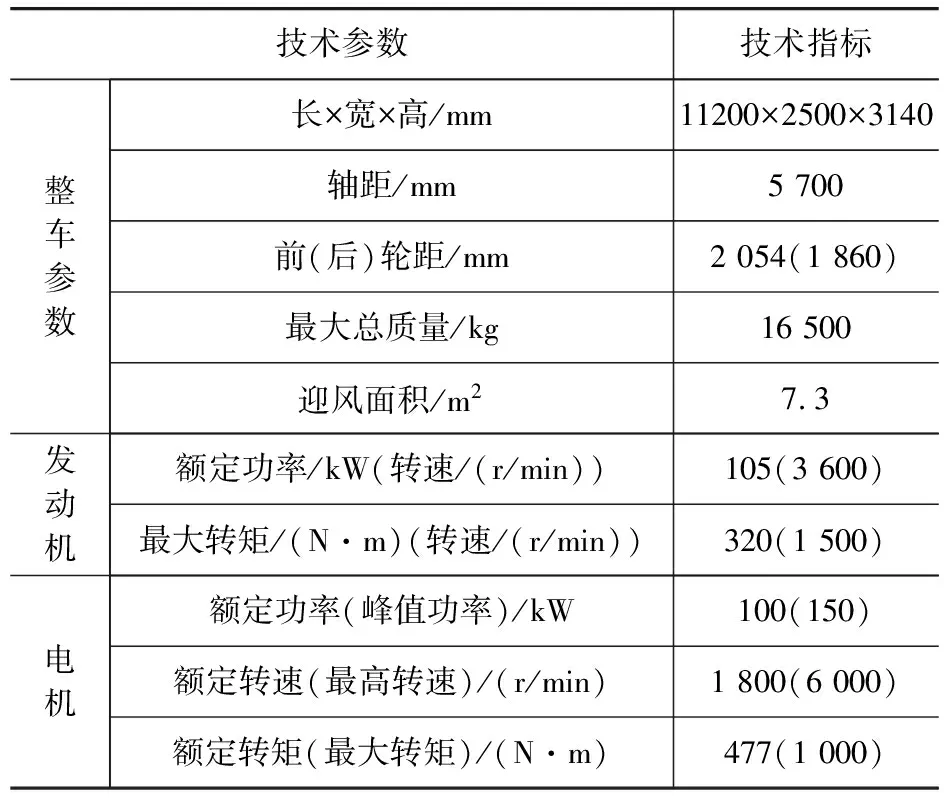
表2 实例HEV的主要技术参数
利用HEV整车仿真模型(图6),输入各部件的参数值(见表2),在中国典型城市循环工况下进行实例HEV样车仿真,仿真结果主要参数变化如图7所示,主要性能指标仿真值如表3所示。
仿真结果表明:
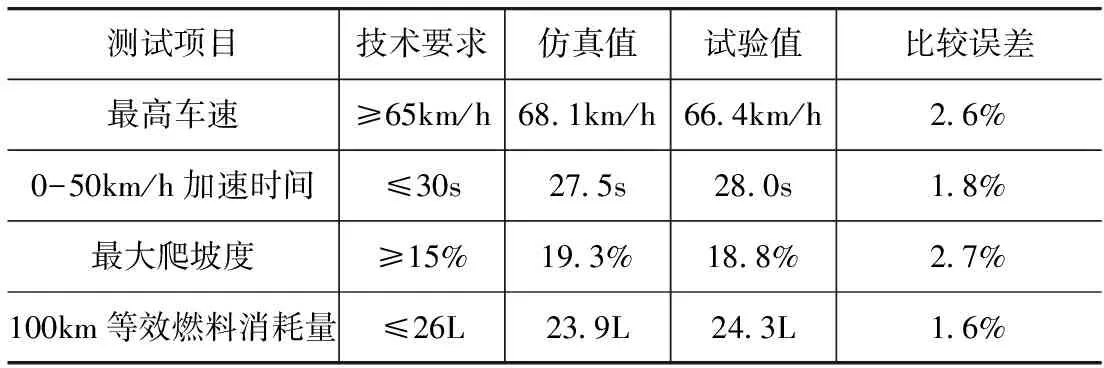
表3 实例HEV仿真和道路试验结果
(1) 在运行过程中动力电池SOC值在0.63~0.72的较小范围波动,确保了动力电池在较高效率区内工作;
(2) 对发动机输出功率范围限制在效率较高的区间(40~80kW)内;
(3) 电机输出功率跟随循环工况的需求功率变化而变化,电机输出功率大于零时为驱动状态,小于零时为再生制动状态。
(4) 所设计的基于混杂自动机模型的HEV动力系统模式变换式驱动控制策略和制动力协调控制的再生制动控制策略能够较好地实现HEV不同运行状态的切换,并确保发动机和动力电池在高效率区工作。
5.3 实例HEV性能道路试验
根据相关试验标准,应用汽车综合试验仪、功率分析仪和信号处理系统等测试仪器进行实例HEV道路性能试验[10],并将主要性能指标的试验值与仿真值进行比较,见表3。结果表明:
(1) 实例HEV样车的动力性和经济性均能满足设计要求,最高车速、0-50km/h起步加速时间、最大爬坡度和典型城市循环工况等效燃料消耗量的仿真值和道路试验值误差均小于3%,验证了在Simulink/Stateflow和Advisor平台上所建立的HEV整车仿真模型的准确性;
(2) 实例HEV样车的循环工况100km等效燃料消耗量为24.3L,比同类型传统燃油城市公交车100km燃油消耗量(28.9L)减少了15.9%,验证了所设计的HEV动力系统的模式变换式驱动控制策略和制动力协调控制的再生制动控制策略的有效性和可行性。
6 结论
(1) 基于混杂动态系统理论进行HEV动力系统分析,建立了基于混杂自动机模型的HEV动力系统控制模型;在此基础上设计了一种集恒温器式和功率跟随式控制策略优点的模式变换式驱动控制策略及制动力协调控制的再生制动控制策略,并应用于实例HEV样车动力系统控制中。
(2) 采用Simulink/Stateflow的混合建模方法,建立了基于混杂自动机模型的HEV动力系统的模式变换式驱动控制策略和制动力协调控制的再生制动控制策略的仿真模型,并建立了基于Simulink/Stateflow和Advisor平台的HEV整车仿真模型。
(3) 在Simulink/Stateflow和Advisor平台上,对实例的HEV的整车动力性和经济性进行仿真,并与道路试验进行比较。结果表明:实例的HEV样车在满足动力性能指标要求的情况下,与同类型传统燃油汽车的燃料消耗量相比减少15.9%,同时验证了基于混杂系统理论的HEV动力系统驱动和制动控制的可行性,为新能源汽车动力系统控制和分析提供了一种新的方法。
[1] 陈全世,等.先进电动汽车技术[M].北京:化学工业出版社,2007:22-40.
[2] 邹明能.混合动态系统控制综合方法研究[D].天津:天津大学,2003.
[3] Zhu Yuan, Chen Yaobin. A Four-Step Method to Design an Energy Management Strategy for Hybrid Vehicle[C]. Proceeding of the 2004 American Control Conference,2004:156-161.
[4] 李炯,张承宁.基于混杂系统理论的电动汽车能量管理策略[J].系统仿真学报,2006,18(10):2932-2935.
[5] Alur R, Courcoubetis C, Henzinger T. Hybrid Automata: An Algorithm Approach to the Specification and Verification of Hybrid Systems[J]. Hybrid Systems, Lecture Notes in Computer Science,1993(736):209-229.
[6] 薛乐,廖沫,魏晨,等.混合系统及其建模[J].系统仿真学报,2004,16(3):375-380.
[7] 尹安东.基于混合系统理论的混合动力客车控制策略研究[D].合肥:合肥工业大学,2010.
[8] 余志生.汽车理论(第3版)[M].北京:机械工业出版社,2003.
[9] 尹安东,赵韩,张炳力.微型电动轿车制动能量回收及控制策略的研究[J].合肥工业大学学报(自然科学版),2008,31(11):1760-1763.
[10] 张俊智,陆欣,张鹏君,等.混合动力城市客车制动能量回收系统道路试验[J].机械工程学报,2009,45(2):25-30.
A Study on the Driving and Braking Controls forHybrid Electric Vehicle Based on Hybrid System Theory
Yin Andong1,2, Zhao Han1,2, Sun Jun1,2& Lu Ruigang3
1.SchoolofMachineryandAutomobileEngineering,HefeiUniversityofTechnology,Hefei230009;2.NationandLocalUnionResearchCenterforAutomotiveTechnology&EquipmentEngineering,Hefei230009;3.SocietyofAutomotiveEngineersofChina,Beijing100055
Based on hybrid system theory, the powertrain system of a hybrid electric vehicle (HEV) with rear wheel drive is analyzed, a control model for HEV powertrain system is built based on hybrid automaton model, and a mode-switch-based drive control strategy and a regenerative braking control strategy with braking force coordination control are proposed. Then a simulation model for HEV powertrain control strategy is set up with Simulink/Stateflow hybrid modeling method, and both performance simulation and road test on a real sample HEV are conducted. The results show that the performance of real sample HEV meets the design requirements with its fuel consumption 15.9% less than the traditional vehicle of same category under the typical urban driving cycles in China.
HEV; hybrid system theory; powertrain system; regenerative braking; control strategy
*国家科技支撑计划项目(2013BAG08B01)和国家新能源汽车产业技术创新工程项目(财建[2012]1095号)资助。
原稿收到日期为2015年7月2日,修改稿收到日期为2015年8月5日。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
能源工程(2022年2期)2022-05-23
逻辑学研究(2022年1期)2022-03-31
成都信息工程大学学报(2021年5期)2021-12-30
延边大学学报(自然科学版)(2021年2期)2021-07-29
建材发展导向(2021年11期)2021-07-28
天津外国语大学学报(2021年1期)2021-03-29
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
初中生世界·九年级(2020年2期)2020-04-10
智富时代(2019年4期)2019-06-01
