一种加权式并联型重复控制的研究
2015-04-10 09:13王禹玺刘秦维
电工技术学报 2015年8期
王禹玺 刘秦维 刘 伟 张 尧 马 皓
一种加权式并联型重复控制的研究
王禹玺 刘秦维 刘 伟 张 尧 马 皓
(浙江大学电气工程学院 杭州 310027)
重复控制(Repetitive Control,RC)技术在逆变器中广泛应用,传统的并联型重复控制(Parallel-type Repetitive Control,PRC)技术通过并联PI环节来提高系统的动态性能。改进并联型重复控制(Improved Parallel-type Repetitive Control,IPRC)技术在 PRC的基础上使系统的跟踪性能和抗干扰性能同时达到最优化。本文提出了一种加权式并联型重复控制(Weighted Parallel-type Repetitive Control,WPRC)技术,该技术相比于IPRC,在满足系统稳态性能的前提下,显著提高了系统在负载切换时的动态性能。首先给出了一种基于特定频率陷波器的重复控制器的设计,然后理论分析对比了WPRC和 IPRC的动态性能并给出了参数设计,最后制作了一台120W车载逆变器样机,验证了WPRC相比于 IPRC所具有的优秀的动态性能。
并联型 重复控制 陷波器 车载逆变器 动态性能
1 引言
基于内模原理的重复控制技术已经被广泛地应用到各种场合,可编程序交流电源(Programmable AC Source,PACS)[1-2]、恒压恒频(Constant Voltage Constant Frequency,CVCF)逆变器[3-4]、不间断电源(Uninterruptible Power Supply,UPS)[5-6]、有源电力滤波器(Active Power Filters,APF)[7-11]、功率因数校正(Power Factor Correction,PFC)[12-14]、交流稳压器(Automatic Voltage Regulator,AVR)和整流器(Rectifier)[15-17]等。重复控制技术成功解决了周期性信号的跟踪和扰动抑制补偿问题,但是其滞后一个周期控制的本质导致了系统差的动态性能[5]。
为了改善重复控制系统的动态性能,不同的瞬时反馈控制作为内环加入到重复控制中,如电流内环控制[1-2,7-11]、状态反馈控制[18-19]等。这些控制策略使系统既有高质量的正弦波形,又能保证良好的动态性能。但是这些控制都需要采样不止一个量,因此增加了系统的成本和体积,难以应用在对体积和成本要求较高的场合(如车载逆变器)。
车载逆变器一般由两级组成,前级是一个高增益的直流升压电路,后级是一个恒压恒频逆变器。一般国外车载逆变器要求稳态输出电压波形总谐波畸变率(Total Harmonic Distortion,THD)在空载和满载下都小于 5%,电压单闭环控制的重复控制很容易就能满足要求,而且是成本最低的方案。但是,由于受采样量的限制,系统的动态性能还需要进一步地提高。
本文提出了一种加权式并联型重复控制技术,该技术使系统的跟踪性能和抗干扰性能能同时达到最优化。通过加权参数的调节作用,加强并联 PI环节的控制作用,使得逆变器在负载切换时有优秀的动态性能。
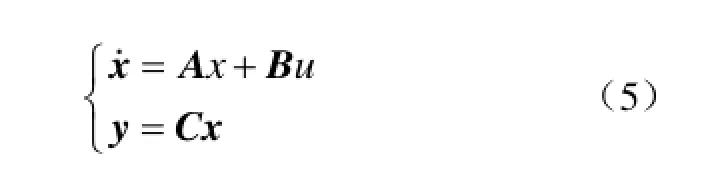
2 WPRC技术提出
为了提高恒压恒频逆变器在负载切换时的动态性能,采用 PI控制和重复控制并联控制(PRC),如图1所示,重复控制决定系统稳态时的准确度和THD,PI控制决定系统在负载切换时的动态性能。图1中点划线框部分是重复控制,C1(z)为PI控制,P(z)为逆变器模型。由图 1容易得到
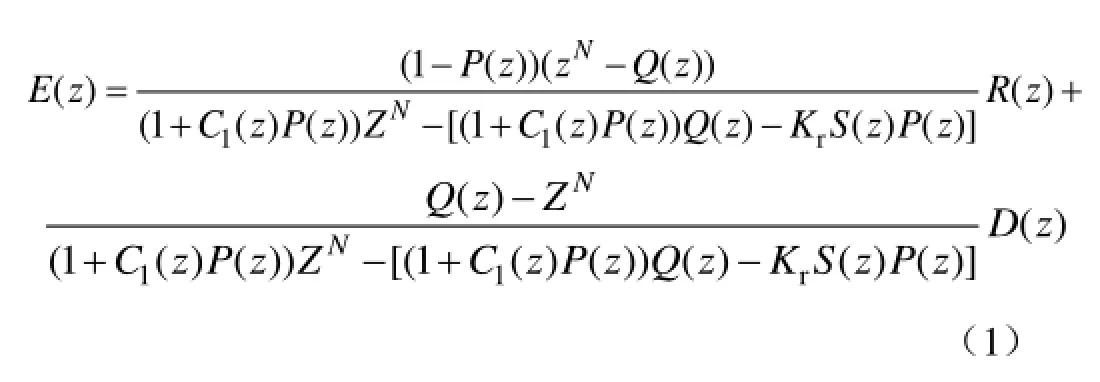
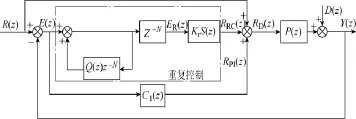
图1 传统并联型重复控制框图Fig.1 Block diagram of traditional repetitive control
跟踪性能和抗干扰性能的表达式不同,一自由度 PI控制不能使系统同时达到最佳的跟踪性能和抗干扰性能,两者往往存在矛盾。图2所示为传统改进并联型重复控制(IPRC),同样得到误差E(z)、
参考R(z)与干扰 D(z)的表达式为
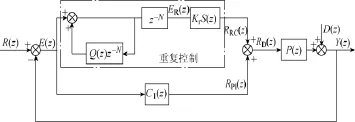
图2 传统改进并联型重复控制框图Fig.2 Block diagram of improved parallel-type repetitive control
可以看到系统的跟踪性能和抗干扰性能的表达式完全相同,因此通过合理的设计重复控制参数和PI控制参数,可以使系统的跟踪性能和抗干扰性能同时达到最优化。
传统改进并联型重复控制到达稳态时,RRC(z)= R(z),RPI(z)=0,系统稳态性能(包括稳态准确度)和THD完全由重复控制决定,而系统切载的动态性能由 PI控制决定。但是在系统稳定的前提下,这里PI参数的范围不能使系统有最优的动态性能,表现为超调过大,调整时间过长。
IPRC在系统稳定前提下,并联的PI环节的控制作用很弱,并不能给系统带来优秀的动态性能。本文提出了一种加权式并联型重复控制(WPRC)策略,如图3所示,在重复控制支路和PI控制支路分别加入加权系数α和 β,其中

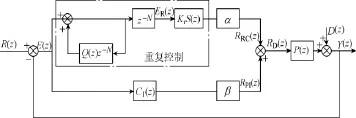
图3 加权式并联型重复控制框图Fig.3 Block diagram of weighted parallel-type repetitive control
同样得到误差E(z)包含参考R(z)与干扰D(z)的表达式为
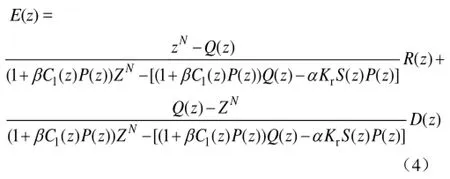
WPRC稳态时RC支路和PI支路的输出与IPRC稳态时不同,。加权系数的引入增强了 PI环节的控制作用,给系统带来了优秀的切载动态性能。但在增强 PI环节控制作用的同时削弱了重复控制在稳态时的作用,系统稳态准确度和 THD有所下降,但仍能满足系统所需的要求。
3 重复控制设计
3.1 逆变器建模
图4是单相全桥逆变器的电路模型,输出电感的串联电阻r1和电容的并联电阻r2为电路的等效阻尼,除了电感电容的寄生电阻,还包括开关管的导通损耗、开关损耗和死区效应引起的损耗等。
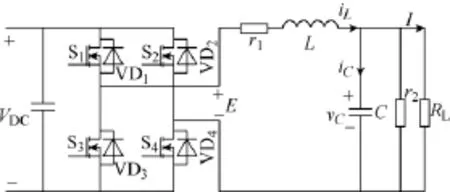
图4 单相全桥逆变器电路模型Fig.4 Circuit model of a single-phase full-bridge inverter
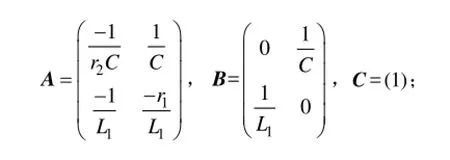
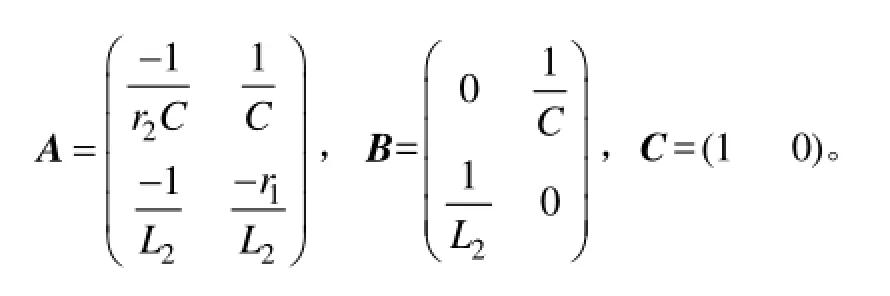
用状态空间平均法对逆变器建模,状态变量为电感电流iL和电容电压vC,输入变量为全桥输出电压E和输出负载电流 I,输出变量为输出电压 U。逆变器输出滤波电感采用环形铁硅铝磁心,空载时电感值为 L1,满载时电感值降为L2。容易得到逆变器的状态空间模型为
3.2 重复控制器参数设计
如图3所示,重复控制包括周期延时环节 z-N,改进内模滤波器 Q(z),重复控制增益 Kr和补偿器S(z),其中补偿器 S(z)包括超前相移环节 zk,陷波器S1(z)和二阶低通滤波器S2(z)。
改进内模滤波器Q(z)可以选择小于1的常数或者二阶低通滤波器,但两者对系统THD的影响基本相同[5]。工程上为了方便设计和缓解有限的软件资源压力,通常选择 Q(z)为 0.95~0.98。重复控制增益 Kr相当于 PI控制中的比例环节,Kr越大重复控制的误差收敛速度越快,稳态误差越小,但是系统的稳定裕量就越小[5],这里选取 Kr=1。陷波器主要为了补偿逆变器的谐振峰值,超前相移环节主要补偿陷波器和二阶低通滤波器引起的相位偏移,使得补偿后的系统在中低频具有零增益零相移的特性,从而有效的抑制谐波。
通常选择梳状滤波器,表达式为

考虑到n只能为整数,此梳状滤波器的陷波频率点和谐振峰值点不吻合,达不到最佳的补偿效果。如图5所示,n=2和n=3的梳状滤波器陷波点都和逆变器的谐振峰值点不吻合,因此补偿效果不好。本文采用特定频率点的陷波器,表达式为

式中,ω为陷波频率点,能根据需要任意选取;a为开口系数,能调节陷波器的开口大小;b为陷波器的增益系数。
取ω为逆变器的空载谐振频率,a=0.8,b= 0.825 7,幅频特性如图 5所示,陷波点介于 n=2和 n=3的梳状滤波器之间,很好地补偿了逆变器的谐振峰。图 6即为逆变器补偿后的幅频特性,可以看到用式(7)作为补偿器的系统最接近零增益特性。
二阶低通滤波器 S2(z)截止频率设置在谐振频率附近,用来加快系统的高频衰减特性,加强系统的稳定性。表 1为逆变器的主要参数。
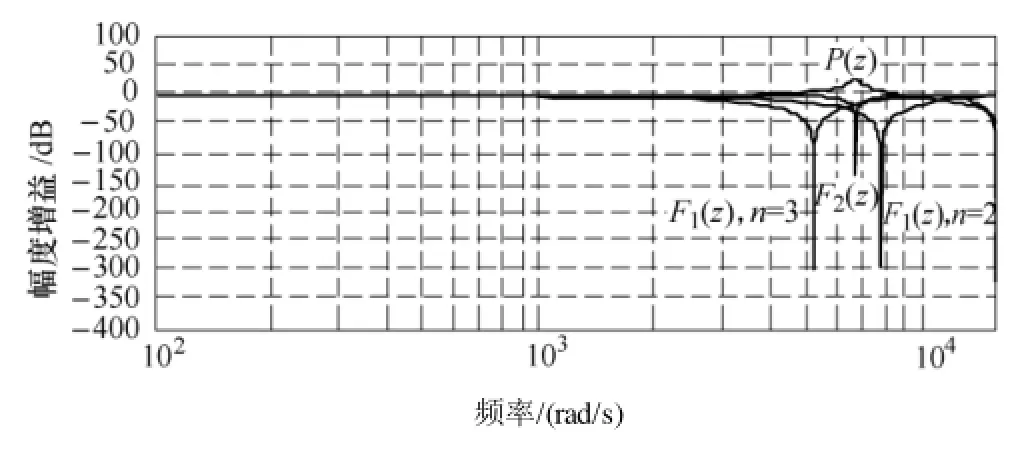
图5 逆变器和补偿器的幅频特性Fig.5 The amplitude-frequency response of inverter P(z) and compensator F(z)
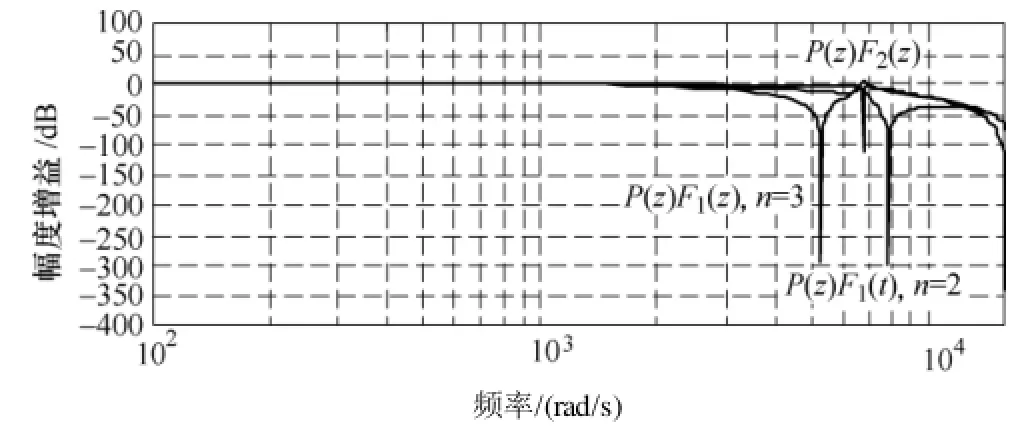
图6 逆变器补偿后的幅频特性Fig.6 The amplitude-frequency response of the inverter P(z) with compensator F(z)
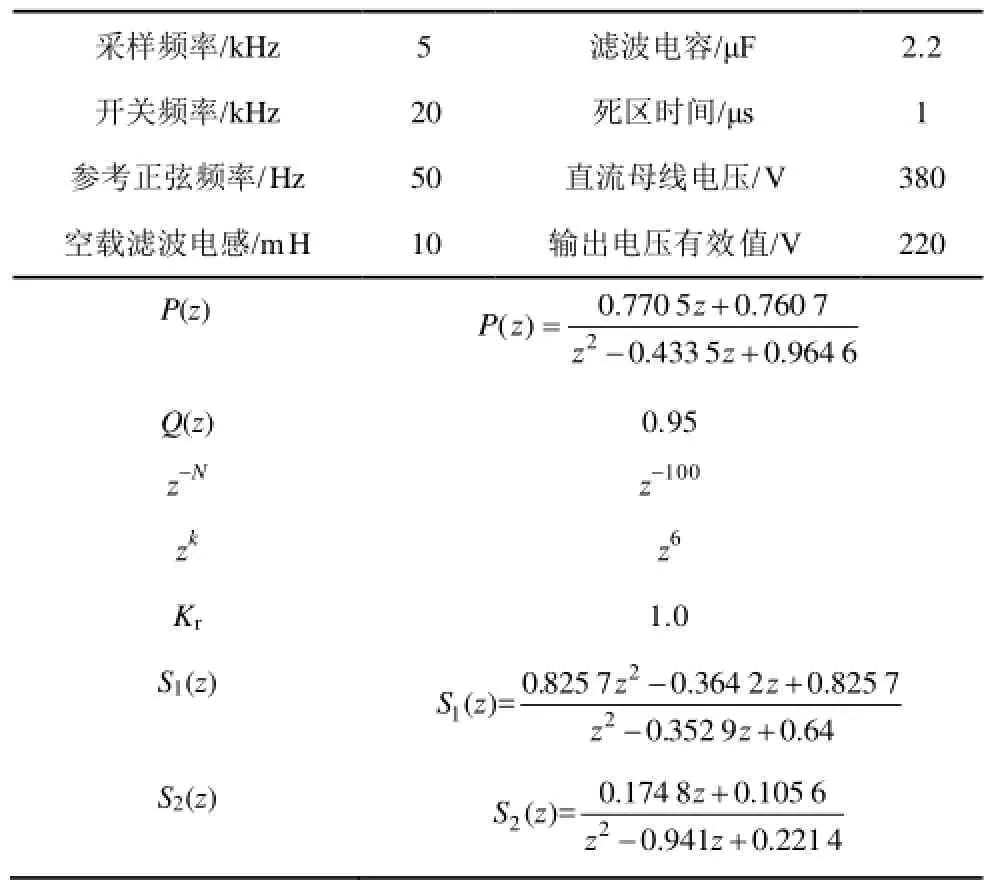
表1 系统参数Tab.1 System parameters
4 IPRC和WPRC性能比较及参数设计
4.1 WPRC中PI环节参数设计
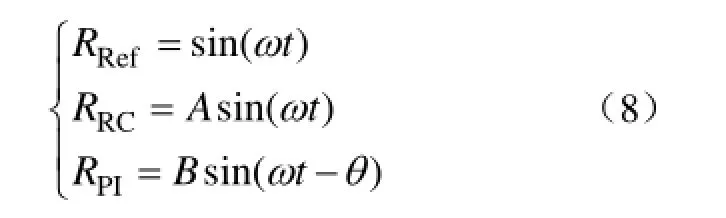
WPRC是一种基于有误差的加权式并联型重复控制技术,相应地图 3中的各个关键波形的表达式为式中,A、B分别为重复控制和PI控制输出的幅值;θ为系统误差经过PI环节的滞后角。WPRC控制波形如图7所示。
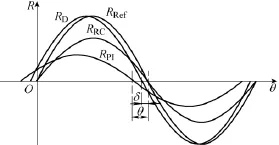
图7 WPRC控制波形图Fig.7 Waveforms of WPRC control
那么加权输出波形表达式为

其中
为了使 WPRC系统的误差尽量小且稳态准确度尽量高,则需满足以下条件:C→1,δ→0。通过设计 PI控制参数使得:①θ尽量趋近于 0,那么 δ也趋近于0;②为PI环节在50Hz处的增益。那么 A≈α,B≈β,由式(3)可知C也接近于 1,系统可以达到满意的稳态性能。同时重复控制参数和PI环节参数可以解耦设计,降低了WPRC系统的设计难度。如果式(3)不等于1,为了输出给定交流电压,θ和δ均不等于0,重复控制和 PI环节耦合在一起,增加了重复控制参数设计的复杂度。所以本文取,在简化参数设计的同时又不影响控制性能。PI环节s域表达式为
则通过PI环节的滞后角度为
在 PI控制中,Kp越大系统超调量越大越不稳定,但是调整时间越短;Ti越大系统超调量越小,但是调整时间越长。一般将 PI控制环节的零点设计在逆变器的谐振峰值点,此时Ti=0.000 15。为了保证系统具有一定的相位裕量,可以将Ti取得更大。图8所示为WPRC输出波形的滞后角δ与Ti的关系,可以看 Ti=0~0.001时,δ=0.64°~0.78°,Ti对系统稳态准确度基本没有影响。Ti越小,系统的带宽越大,系统的动态性能越好,但是由 Bode图易知系统的相位裕量就会越小,系统的稳定性能就越差。所以参数 Ti的设计是WPRC系统动态性能和稳定性的折中,本文取Ti=0.000 5。
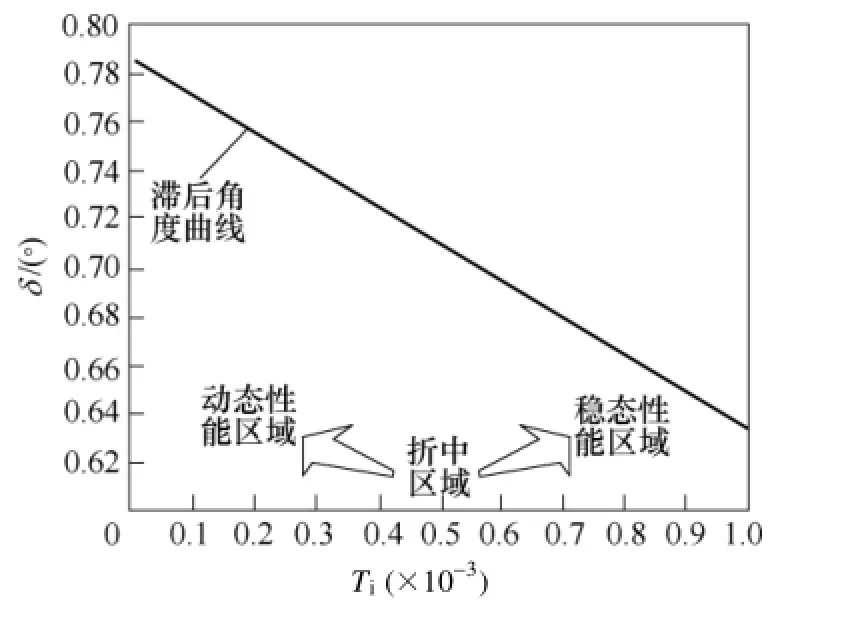
图8 Ti参数优化选择图Fig.8 Chart of optimized parameterTi
4.2 IPRC和WPRC稳定性分析比较
系统稳定是任何先进控制的前提,而且还需要有大的稳定裕量来保证系统在元器件参数漂移或者大的扰动时,系统能稳定并且控制性能良好。IPRC稳定性的条件为式(2)的特征根方程的所有解都位于单位圆内,即
同样WPRC的稳定性条件为
将式(3)代入式(13),得
根据式(12)、式(14)画奈奎斯特图来判断系统的稳定性。如图 9所示,稳定区域是圆心在 Q(z)= 0.95的单位圆,其他曲线是向量角频率从零到奈奎斯特频率的轨迹(正负轨迹),若在单位圆内,则式(12)满足即系统稳定。图9中A的轨迹为RC,随着并联的PI环节的Kp值增大,系统逐渐不稳定,当Kp=0.7时,高频部分的轨迹已经超出单位圆,导致系统不稳定。图10对IPRC和WPRC在Kp=0.7时的稳定性作了对比,A是IPRC的轨迹,由前面分析可知此时 IPRC已经不稳定。加入加权系数的 WPRC在 Kp=0.7的情况下,高频部分轨迹显著减小,系统由不稳定变成稳定,而且有很大的稳定裕量。这也说明了 IPRC在系统稳定前提下,并联的PI环节的控制作用很弱,并不能给系统带来优秀的动态性能。相反 WPRC通过加权系数加强了 PI环节的控制动作,显著提高了系统的动态性能。图 11则分析了不同加权比例时 WPRC的稳定性,显然随着β/α的比值增大,系统的稳定性增强,稳定裕量越大。
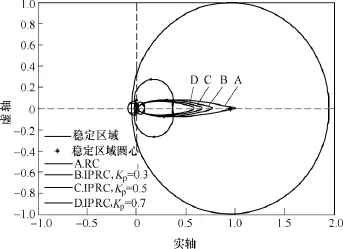
图9 不同Kp值时IPRC稳定性分析Fig.9 Stability analysis of IPRC with different Kp
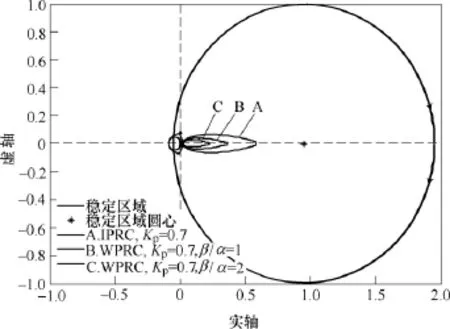
图10 Kp=0.7时IPRC和WPRC稳定性对比分析Fig.10 Stability comparison of IPRC and WPRC while Kp=0.7
4.3 IPRC和WPRC动态性能分析比较与加权参数设计
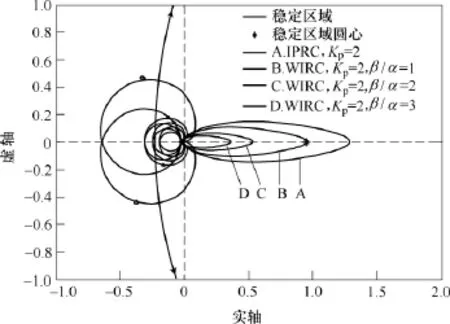
图11 不同Kp值时WPRC稳定性分析Fig.11 Stability analysis of WPRC with different Kp
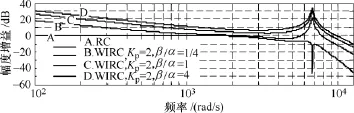
图12 不同加权值时系统Bode图Fig.12 Bode diagram of system with different β/α
上面介绍了PI环节的参数设计,使得系统在一定稳定裕量的前提下有较好的稳态性能。图 12是不同加权值时系统的开环Bode图(未包含内模),可以看到,β/α的比值越大,系统的带宽越宽,即系统的动态性能越好。所以加权系数的加入加强了并联 PI环节的调节作用,使得 WPRC系统相比于IPRC系统具有更优秀的动态性能。然而β/α的比值不是越大越好,随着PI环节控制作用的增强,重复控制对系统稳态的控制作用减弱,使得系统的THD越来越差,所以β/α的参数选择是系统THD和动态性能的一种折中。
5 实验结果与分析
为了验证WPRC相比于IPRC的优秀的动态性能,搭建了一台 120W 的车载逆变器,后级即为CVCF逆变器(主要电路参数见表1)。考虑到产品的成本和空间,控制芯片为英飞凌的 XC8368位单片机,考虑到单片机的运算储存能力,四个开关周期控制一次,即RC系统可以消除2.5kHz以下的谐波干扰和抑制周期性的干扰,使得系统有很好的THD。
图13为不同控制策略下系统的稳态误差,可见RC系统的稳态误差最小几乎为零。IPRC的稳态误差稍微比 RC的大一点,但还是接近于零。WPRC的稳态误差就比较大,这是因为WPRC本来就是基于有系统稳态误差控制的,通过对正弦参考表的更改,仍能使系统输出在 220V左右,且稳态准确度在5%之内,具体数值如表2所示。
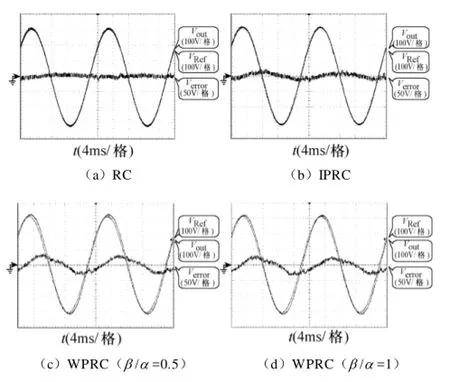
图13 不同控制策略下空载时系统输出和稳态误差Fig.13 Output and steady state error of system with different control schemes
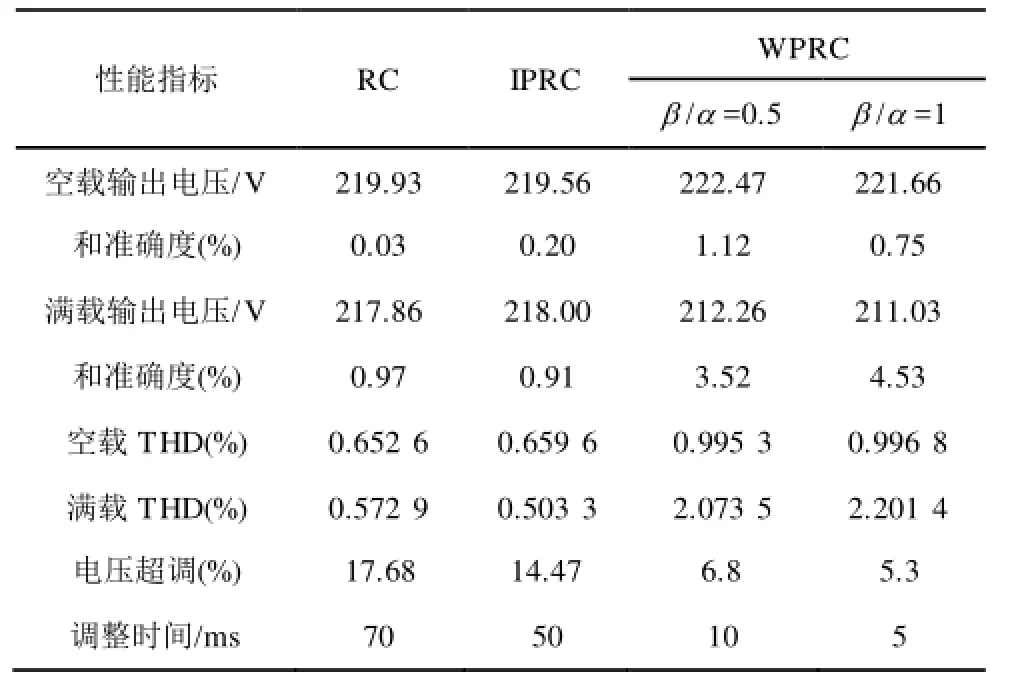
表2 不同控制策略系统性能比较Tab.2 Comparison of different control schemes
图14为不同控制策略下系统满载时的频谱图,可见 THD由 RC、IPRC、WPRC逐渐增大。因为WPRC加强了稳态时PI环节的控制作用,所以系统的THD没有RC和IPRC的好,但是在空载和满载下,THD仍能满足系统指标要求的小于5%。
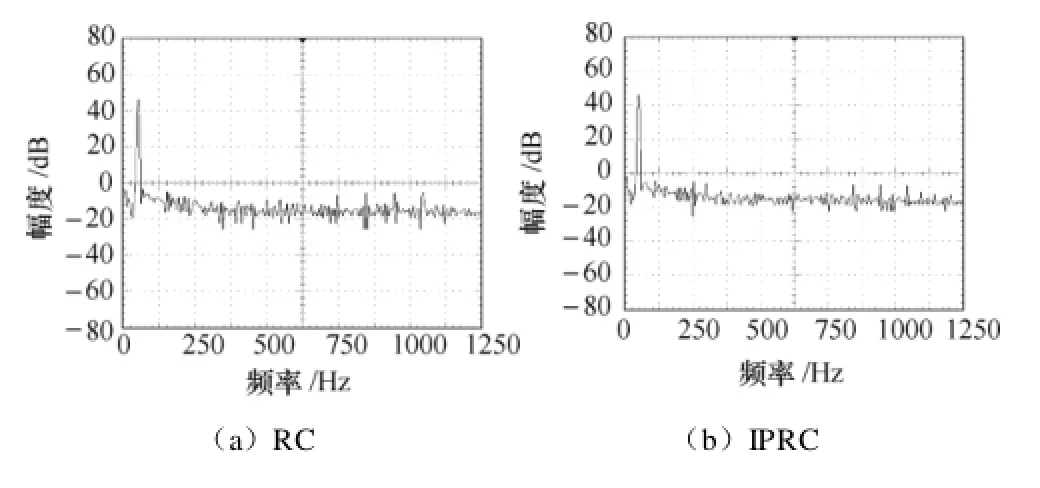
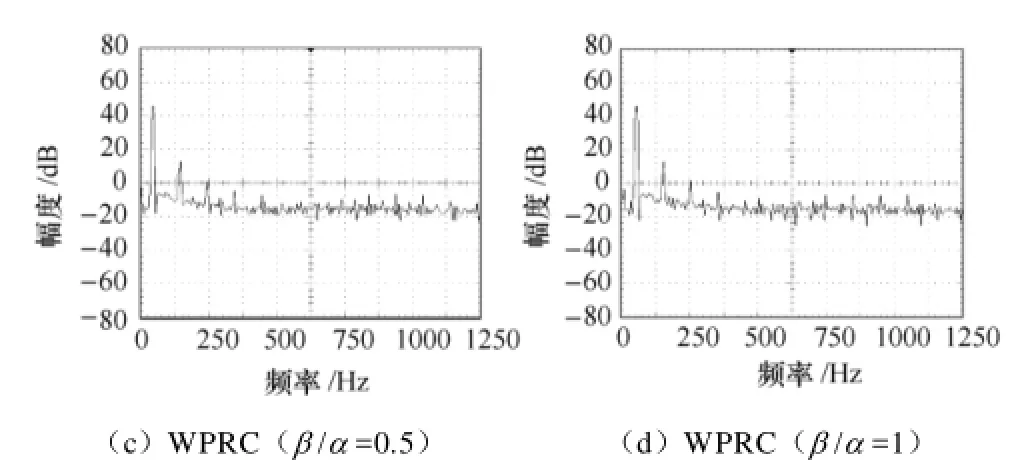
图14 不同控制策略下系统满载时的频谱图Fig.14 Power spectrum with different control schemes under full load
图15 所示为不同控制策略下系统满载切到空载的动态波形。可见IPRC相比于RC切载时的电压超调和调整时间基本上没有改善。而 WPRC相比于IPRC,动态性能改善非常明显,电压超调从 14.47%减小到5.3%,超调时间从70ms降低到5ms。随着β/α的增大,系统的动态性能改善已经不明显,这是因为WPRC系统基本达到了电压单环的纯 PI控制的动态性能。图16所示为不同控制策略下系统空载切到满载的动态波形。此时系统输出没有电压超调,调整时间和上面的分析一致。
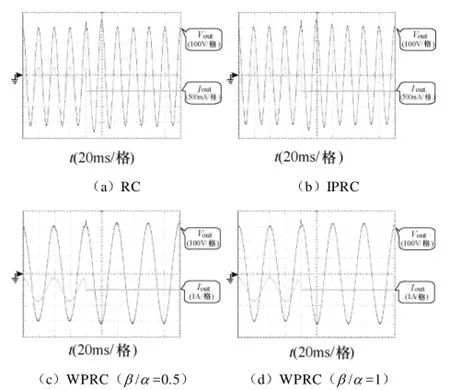
图15 不同控制策略下系统满载切到空载的动态波形Fig.15 50Hz output voltage and current waveforms operating from full load to no load with different control schemes
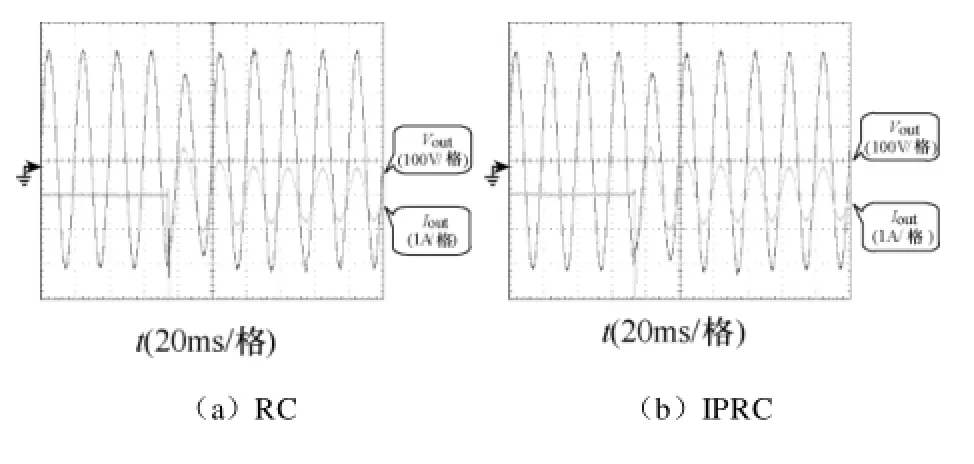
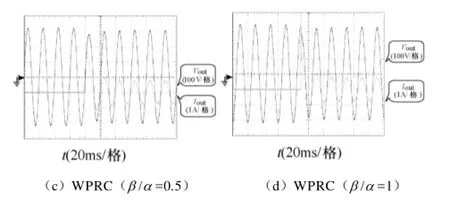
图16 不同控制策略下系统空载切到满载的动态波形Fig.16 50Hz output voltage and current waveforms operating from no load to full load with different control schemes
6 结论
本文首先通过分析传统重复控制的局限性,引出了改进型重复控制技术,使得系统能同时最优化跟踪性能和抗干扰性能。但是所并联的 PI控制环节控制作用弱,对动态性能的改善十分有限,为了提高重复控制系统的动态性能,提出了一种加权式并联型重复控制技术,在系统满足稳态要求的前提下,显著提高了系统切载时的动态性能。
[1] Ying Yu Tzou, Rong-Shyang Ou, Shih-Liang Jung, et al. High-performance programmable AC power source with low harmonic distortion using DSP-based repetitive control technique[J]. IEEE Transactions on Power Electronics, 1997, 12(4): 715-725.
[2] Ying-Yu Tzou, Shih-Liang Jung, Hsin-Chung Yeh. Adaptive repetitive control of PWM inverters for very low THD AC-voltage regulation with unknown loads [J]. IEEE Transactions on Power Electronics, 1999, 14(5): 973-981.
[3] Keliang Zhou, Kay-Soon Low, Wang D, et al. Zerophase odd-harmonic repetitive controller for a singlephase PWM inverter[J]. IEEE Transactions on Power Electronics, 2006, 21(1): 193-201.
[4] Zhang Bin, Wang Danwei, Zhou Keliang, et al. Linear phase lead compensation repetitive control of a CVCF PWM inverter[J]. IEEE Transactions on Industrial Electronics, 2008, 55(4): 1595-1602.
[5] Kai Zhang, Yong Kang, Jian Xiong, et al. Direct repetitive control of SPWM inverter for UPS purpose [J]. IEEE Transactions on Power Electronics, 2003, 18(3): 784-792.
[6] Escobar G, Valdez A A, Leyva-Ramos J, et al.Repetitive-based controller for a UPS inverter to compensate unbalance and harmonic distortion[J]. IEEE Transactions on Industrial Electronics, 2007, 54(1): 504-510.
[7] Costa-Castello R, Grino R, Fossas E. Odd-harmonic digital repetitive control of a single-phase current active filter[J]. IEEE Transactions on Power Electronics, 2004, 19(4): 1060-1068.
[8] Zou Zhixiang, Wang Zheng, Cheng Ming, et al. Active power filter for harmonie compensation using a digital dual-mode-structure repetitive control approach[C]. IEEE International Symposium on Power Electronics for Distributed Generation Systems, Aalborg, Denmark, 2012: 161-166.
[9] Mattavelli P, Marafao F P. Repetitive-based control for selective harmonic compensation in active power filters[J]. IEEE Transactions on Industrial Electronics, 2004, 51(5): 1018-1024.
[10] 贾要勤, 王晓滨, 杨强. 并联有源电力滤波器的自适应重复控制[J]. 电工技术学报, 2011, 26(10): 118-122.
Jia Yaoqin, Wang Xiaobin, Yang Qiang. Adaptive repetitive control of parallel active power filter[J]. Transactions of China Electrotechnical Society, 2011, 26(10): 118-122.
[11] 张东江, 仇志凌, 李玉玲, 等. 基于 LCL滤波器的高稳态性能并联有源电力滤波器[J]. 电工技术学报, 2011, 26(6): 137-143.
Zhang Dongjiang, Qiu Zhiling, Li Yuling, et al. Shunt active power filter with high steady-state performance based on LCL-filter[J]. Transactions of China Electrotechnical Society, 2011, 26(6): 137-143.
[12] Younghoon Cho, Jih-Sheng Lai. Digital plug-in repetitive controller for single-phase bridgeless PFC converters[J]. IEEE Transactions on Power Electronics, 2013, 28(1): 165-175.
[13] Ramos G A, Costa-Castelló R. Power factor correction and harmonic compensation using second-order oddharmonic repetitive control[J]. IET on Control Theory & Applications, 2012, 6(11): 1633-1644.
[14] Wei-Hsiang Wang, Ying-Yu Tzou. Using repetitive control for light load THD and efficiency improvement for boost digital PFC converters[C]. Power Electronics and Motion Control Conference, Harbin, China, 2012: 1915-1920.
[15] Zhou Keliang, Wang D. Digital repetitive controlled three-phase PWM rectifier[J]. IEEE Transactions on Power Electronics, 2003, 18(1): 309-316.
[16] Zhong Qingchang, Ming Wenlong, Cao Xin, et al. Reduction of DC-bus voltage ripples and capacitors for single-phase PWM-controlled rectifiers[C]. IEEE Conference on Industrial Electronics Society, Montreal, Canada, 2012: 708-713.
[17] 高吉磊, 张雅静, 林飞, 等. 单相PWM整流器谐波电流抑制算法研究[J]. 中国电机工程学报, 2010, 30(21): 32-39.
Gao Jilei, Zhang Yajing, Lin Fei, et al. Research on harmonic current elimination method of single-phase PWM rectifiers[J]. Proceedings of the CSEE, 2010, 30(21): 32-39.
[18] 刘新民, 邹旭东, 康勇, 等. 带状态观测器的逆变器增广状态反馈控制和重复控制[J]. 电工技术学报, 2007, 22(1): 91-95.
Liu Xinmin, Zou Xudong, Kang Yong, et al. An inverter based on state-feedback integral control and repetitive control technology with state-observer[J]. Transactions of China Electrotechnical Society, 2007, 22(1): 91-95.
[19] 黄朝霞, 邹旭东, 童力, 等. 基于极点配置和重复控制的电流型单相动态电压调节[J]. 电工技术学报, 2012, 27(6): 252-260.
Huang Zhaoxia, Zou Xudong, Tong Li, et al. Research on current mode single-phase dynamic voltage regulator based on pole-assignment and repetitive control[J]. Transactions of China Electrotechnical Society, 2012, 27(6): 252-260.
Study of Weighted Parallel-Type Repetitive Control
Wang Yuxi Liu Qinwei Liu Wei Zhang Yao Ma Hao
(School of Electrical Engineering Zhejiang University Hangzhou 310027 China)
The repetitive control is widely used in inverters, the traditional parallel-type repetitive control(PRC) scheme improves dynamic response with PI control in parallel. The improved paralleltype repetitive control(IPRC) scheme can optimize both tracking performance and anti-jamming performance of the system at the same time, compared with PRC. This paper proposes a weighted parallel-type repetitive control(WPRC) scheme, which achieves excellent dynamic response during load variation. Meanwhile, system with WPRC scheme still achieves the index of tota l harmonic distortion(THD). Repetitive control design based on specific frequency notch filter is first given. Then the theoretical analysis and design of comparing IPRC and WPRC in respect of dynamic response is presented. Finally a 120W vehicle inverter prototype has been constructed to the proposed control scheme. Experimental results show that the WPRC controlled inverter can achieve both good dynamic response and low THD.
Parallel-type, repetitive control, notch filter, vehicle inverter, dynamic response
TM461
王禹玺 男,1988年生,博士研究生,主要研究方向为直流-直流变换器及其控制策略。
2013-06-09 改稿日期 2013-06-25
刘秦维 男,1988年生,硕士研究生,主要研究方向为 DC-DC谐振变换器及其控制。
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
中学生数理化·中考版(2021年10期)2021-11-22
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
西部广播电视(2015年3期)2016-01-15
广西科技大学学报(2015年4期)2015-02-27