棒控系统内部故障报警分析
2015-04-07 11:54高照
科技视界 2015年9期
高照

【摘 要】由于棒控系统直接关系到机组运行时反应堆正常的反应性控制和负荷跟踪,而且棒控系统的不正常工作直接影响核电站的安全稳定运行,严重的可导致保护动作,造成停堆等事故的发生。因此,本文论述了二厂一/二号机组棒控系统内部的相关报警产生的原因和对机组正常运行的影响,以及运行人员应做出的响应和处理方法。
【关键词】棒控系统;RGL001/003AA;RGL011AA;棒组故障
1 系统概述
1.1 设备组成
完整的棒控系统包括:棒位部分、控制棒驱动机构(CRDM)、棒控部分、控制自动运行的调节装置——功率调节设备。
1.2 棒控部分
通常所说的棒控系统主要指其中的棒控部分,它包括:1个控制逻辑柜、9个电源柜、3个配电柜、1套中继电路和位于主控室的若干操作器、指示灯等。逻辑柜和电源柜都由PLC控制,包含11个PLC。电源柜设计采用“一带一”方案,一组电源装置(三个电源机箱)只控制一台CRDM。每个电源柜装有四组共十二个电源机箱,控制一个子组四台CRDM运行。其中控制逻辑柜分别接收来自功率控制系统、主控室和中继电路送来的控制与逻辑信号,通过逻辑柜中各PLC预置程序向下游各电源柜发出信号,来控制各个控制棒的上提和下插。
1.3 棒位部分
棒位测量部分是用来产生棒束的实际位置、监视棒控系统的运行状态从而向操纵员提供棒束位置信息,不会产生保护和控制联锁信号。棒位设备包括33个棒位探测器,1个测量柜,1个处理柜,1个棒位显示屏。这里简单介绍下棒位测量的原理:棒位探测器是利用电磁感应原理工作的,棒位测量柜中的MCP10卡向探测器原边线圈提供激磁电源,棒位测量柜中的MCP22卡对测量线圈产生的感应电压信号进行处理,得到一个五位的葛莱码信号,这个葛莱码信号就与控制棒在堆芯的位置存在一一对应关系,此信号一路送到主控室显示,另一路送棒位处理柜进行比较、处理,进而产生各种棒位报警。
1.4 控制棒驱动机构(CRDM)
控制棒驱动机构CRDM由驱动轴、密封壳组件、线圈和磁轭组成,每个CRDM包括提升、传递、保持线圈各一个,线圈和磁轭构成电磁铁;衔铁、勾爪受这三个磁铁的控制,线圈通电时衔铁上升、勾爪啮合。三个线圈依照编排好的先后次序,依次通电和断电以带动两副勾爪抓入/退出驱动轴齿槽从而产生使传动杆上升或下降的电磁力以实现棒的上升或下降。
其中保持线圈控制保持勾爪,线圈通电时保持勾爪插入驱动轴环形槽,使 控制棒驱动轴保持不动;线圈失电时保持勾爪从驱动轴环形槽退出。保持勾爪不能上下移动。传递线圈控制传递勾爪,线圈通电时传递勾爪插入驱动轴环形槽,使控制棒驱动轴保持不动;线圈失电时传递勾爪从驱动轴环形槽退出。传递勾爪固定在传递勾爪组件上,整个传递勾爪组件受提升衔铁控制,可以移动一步。提升线圈控制提升衔铁,线圈通电时提升衔铁使整个传递勾爪组件向上移动一步。在紧急停堆情况下,三个线圈均失电,整束控制棒靠重力作用向下加速运动,直接到堆芯底部,以实现快速信堆。在没有任何控制逻辑信号情况下,只有保持线圈通电,使控制棒保持在原先的位置上不变。
2 故障报警分析
棒控系统在设计时就充分的考虑到了棒控系统内部设备出现故障时,对控制棒产生的不利影响,并以主控室报警的形式把故障告知给主控室操纵员。对于系统内部故障报警我们主要介绍两类:电源柜故障报警和棒位测量故障报警。
2.1 电源柜故障报警
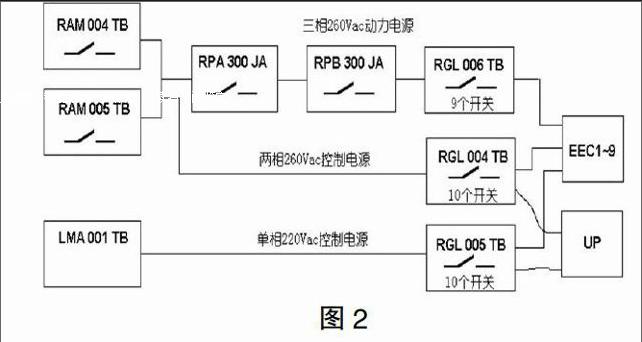
首先我们先了解一下棒控系统各电源柜和逻辑处理柜是如何供电的。对于每个机柜而言,控制电源由两路冗余交流电组成,两相260VAC和单相220VAC。两路电源互为备用。两路交流电源经过变压、整流、滤波电路后,输出两路稳定的±15Vdc、+24Vdc,作为整个机柜的低压直流控制电源。其中任何一路控制电失去,对控制棒的棒位和移动都不会产生影响,但是如果两路控制电源同时失去,那么该电源柜控制的子组将会掉入堆芯。
电源柜的动力电源是三相260V交流电源,来自棒电源机组。动力电源经整流后输出到驱动机构。如下图所示:
按照故障类型的不同和对系统的影响不同,机柜故障报警又可分为“非紧急故障”和“紧急故障”两种。根据控制棒组的不同,“紧急故障”又分为RGL 001 AA (停堆棒组控制逻辑运行故障 )或 RGL 003 AA(控制棒组控制逻辑运行故障)。我厂触发“紧急故障”报警大致有两种情况:逻辑柜输出的棒速信号超出4-20mA范围(逻辑柜输出信号故障);电源柜提升、传递、保持线圈电流异常(控制棒驱动机构和电源柜自身控制故障)。由于这两种情况都会直接影响到控制棒的运行,所以当出现“紧急故障”时有故障的电源柜将会自动断开逻辑柜来的指令,同时该电源柜中所有的棒束驱动机构的保持和传递线圈同时被激励(双保持),闭锁相应被控制子组的移动,从而减轻和限制故障对运行的影响。又因为在逻辑柜PLC中预置程序中限定的同一组各子组是相差半个周期运动的,所以RGL001AA将直接闭锁SA组动棒;对于RGL003AA,A1或A2柜紧急故障只直接闭锁A组动棒,B1或B2柜紧急故障只直接闭锁B组动棒,C1或C2柜紧急故障只直接闭锁C组动棒, D柜紧急故障只直接闭锁D组动棒。同时,各组之间互不影响。就平时功率运行而言,如果D棒组出现上述情况将会使棒控系统失去负荷跟踪能力(类似卡棒)。因此,对于RGL001/003AA应引起足够的重视。除了及时联系相关人员处理故障和就地通过机柜报警确认具体故障类型外,还应该立即停止一切汽机负荷变化(必要时通过改变硼浓度来平衡一/二回路功率),并且将控制棒组置手动位置。待处理完成后,方可解除动棒闭锁,回复自动。
“非紧急故障”(RGL002AA),该报警将逻辑柜除棒速超范围外的其它故障和9个电源柜的非紧急故障综合在一起。具体包括:逻辑柜260V交流控制电源不存在、逻辑柜220V交流控制电源不存在、电源柜控制电源故障(9个电源柜的非紧急故障信号都会触发)、逻辑柜PLC电源不正常、逻辑柜接口电源不正常等其它非紧急故障。002AA虽然不会像001/003AA那样直接影响控制棒组的动棒,但也应该引起足够的注意,及时处理。
2.2 棒位测量故障报警(RGL011AA)
RGL011AA代表了棒位测量部分几乎所有设备异常时的报警。具体包括了:测量柜电源故障、通风故障;扫描存在测量位置错误(测量位置超范围、测量位置变化大于1、与给定方向不一致);处理柜24V电源故障;处理柜PLC 故障;逻辑柜、电源柜给定位置不一致;给定位置读取指令错误等。棒位测量故障中与操纵员关系最为紧密的应该是棒位指示的故障,此时操纵员将无法正确的监视控制棒在堆芯的准确位置。当一个分棒组中有一个棒位指示器故障时,根据功率水平的不同有着不同的处理方法。大于50%FP情况下,应通过每8小时测量一次堆芯通量密度并且每次将相应棒组移动11步以上的方法来检测故障棒束的位置。当出现如每个分棒组有两个或两个以上棒位指示器故障的情况,技术规格书中则要求机组1小时内进入热停堆。1/2号机组运行期间也多次出现了这一报警,大多是因为棒位测量部分中测量柜的MCP22卡件故障,导致与棒位对应的葛莱码信号跳变所致。
2.3 棒组故障报警
“棒组故障报警”是一个统称,它具体包括了RGL012AA(A棒组)、RGL013AA(B棒组)、RGL014AA(C棒组)、RGL015AA(D棒组)、RGLO16AA(SA棒组)。在正常情况下,任意一个棒组如果出现了一下情况之一便会触发它们各自的棒组故障报警:
1)棒组失步(静态失步≥10步、动态失步≥12步)
2)棒棒失步≥12步
3)棒在低位≤5步
对于停堆棒组SA棒组,除了上述3点以外,还包括了“棒偏离高位”即测量棒位<224步的情况。从上面的具体报警原因可以看到,所谓的棒组故障报警其实就是特指了控制棒失步的报警。针对这一故障类型,运行有一本专门的应对规程“I RGL 001”可以处理。但是我们还是要有其他一些方面要注意。由于失步现象往往发生在升降功率和有提插控制棒操作的实验过程中,而且失步产生的I0也都是第一组I0,所以我们必须事先控制机组的I0数量。避免同时出现两个第一组I0时必须后撤的尴尬境地。如果发现棒位显示有失步情况,同一棒组中两个分棒组的步计数器的步数有偏差≥9步,或者触发控制棒组故障报警, 应该马上通过对外核测通道或者堆芯出口热电偶来验证是否真的出现失步,同时应密切关注象限功率倾斜比、ΔI等参数是否满足运行限制。并优先执行以下操作:禁止提升功率;暂停二回路负荷变化;控制棒至手动方式,有必要时利用稀释、硼化方式平衡一、二回路功率;对于可能棒位低于插入限值的情况,为了满足一定的停堆裕度,必须降低功率,建立一种新的与之相适应的控制棒棒位。之后及时通知仪控人员查找故障原因,并进行失步校正。
【参考文献】
[1]秦山第二核电厂运行技术规格书[Z]..
[2]秦山第二核电厂最终安全分析报告:第15章[Z].
[3]运行事故规程(I RGL 001)[Z].
[4]RGL系统手册[Z].
[责任编辑:曹明明]
猜你喜欢
大电机技术(2022年4期)2022-08-30
中国特种设备安全(2021年5期)2021-11-06
家庭影院技术(2021年3期)2021-05-21
核科学与工程(2021年2期)2021-05-18
现代应用物理(2021年1期)2021-04-16
铁道通信信号(2020年5期)2020-09-21
模具制造(2019年7期)2019-09-25
铁道通信信号(2016年10期)2016-06-01
设备管理与维修(2016年6期)2016-03-16
核科学与工程(2015年1期)2015-09-08