中空环形行波超声波电机定子振动解析模型
2015-04-06 06:19蒋春容陆旦宏
电工技术学报 2015年7期
蒋春容 陆旦宏 金 龙
(1.南京工程学院电力工程学院 南京 211167 2.东南大学电气工程学院 南京 210096)
中空环形行波超声波电机定子振动解析模型
蒋春容1陆旦宏1金 龙2
(1.南京工程学院电力工程学院 南京 211167 2.东南大学电气工程学院 南京 210096)
为分析定转子间的接触对定子振动的影响,建立中空环形行波超声波电机定子振动解析模型。根据电机的结构特点,将定子等效为等厚度的圆环形梁,等效过程中,忽略定子齿的刚度,但将定子齿的质量等效到定子梁中,采用解析法建立等效定子梁的自由振动模型和受迫振动模型,得到定子不同振动模态对应的自由振动频率以及定子在外加激励电压和定转子间法向接触压力作用下的受迫振动响应。结果表明,定子等效处理的方法是合理的,电压激励和法向接触压力激励所产生的定子振幅分别与电压幅值和预压力大小呈正比关系,定转子间所施加的预压力较小,因此接触压力对定子振动的影响较小。将理论分析结果与实验测试结果进行比较,二者基本吻合,验证了所提出的解析模型的正确性。
超声波电机 定子振动 解析模型 接触压力
0 引言
超声波电机是利用逆压电效应将弹性材料的微观变形通过共振转换为动子宏观运动的新型电机,在照相机、航空航天及医疗仪器等领域具有广阔的应用前景[1]。环形行波超声波电机是目前应用最广泛的超声波电机,其能量转换有两个过程,第一个过程是通过逆压电效应将高频交流电转换为定子的高频振动,第二个过程是通过摩擦将定子振动转换为转子的旋转运动。超声波电机定子振动模型的研究,对电机的设计、优化及控制具有重要作用[2-4]。
目前,国内外许多学者对超声波电机定子的振动特性进行了分析。P.Hagedorn等[5,6]考虑定子径向厚度的变化提出了超声波电机定子的自由振动模型以及在外加电压作用下的受迫振动响应。Y.Kagawa等[7]用有限元法分析了超声波电机定子振动的动态响应,揭示了定子从压电陶瓷通电到定子稳态振动建立的过程。J.R.Friend等[8]用解析法建立了定子的振动模型,模型中忽略定子齿的影响,分析了超声波电机定子的自由振动和给压电陶瓷通电后的受迫振动响应。夏长亮等[9]用有限元法分析了定子模态和受迫振动响应,研究了定子直径和齿高对定子振动的影响。莫岳平等[10,11]分析了超声波电机定子的振动,提出定子最优振动模态的选择原则。D.Sun等[12]将定子环等效为Euler-Bernoulli梁,考虑两端简支边界条件,求解定子振动方程,研究电机在不同参数下的性能特性。J.L.Pons等[13]提出了环形超声波电机定子振动模型,模型考虑了定子齿的刚度,采用里兹法求解定子振动方程。Yao Z.Y.等[14]基于基尔霍夫薄板理论建立了行波超声波电机定子振动模型,模型忽略定子齿的影响,将定子看成等厚度的圆环形薄板,分析了定子的自由振动和受迫振动响应。王光庆等[15]将压电复合定子简化成等直梁,考虑两端简支条件,得到定子振动的稳态解,然后将接触面的摩擦损耗和转子的输出功率视为等效阻尼损失,得到电机的输出特性和效率。以上研究或采用有限元法,或采用解析法分析了行波超声波电机的定子振动模型,但均未考虑定转子间的接触对定子振动的影响。张炜等[16]采用有限元计算软件分析了预应力对超声波电机定子振动固有频率和振幅的影响,但其理论分析结果缺乏实验验证。
目前对超声波电机定子振动模型的研究中,还缺乏定转子间的接触压力对定子振动影响的深入分析。本文采用解析法建立中空环形行波超声波电机的定子振动模型,将定子等效为圆环形的等厚度梁,首先分析其自由振动,得到自由振动模态及对应的频率,然后分析定子在高频交流电作用下的受迫振动以及定转子间的接触压力对定子振动的影响,最后用实验测量结果验证了理论分析结果。
1 中空环形行波超声波电机的结构
本文以佳能照相机镜头调焦使用的中空环形行波超声波电机为研究对象,其结构如图1所示[17]。一般的环形行波超声波电机定子内部有较薄的支撑板以固定定子,且定、转子的外形均表现为圆板而非空心圆环。与此不同的是,该中空环形电机无内部支撑结构,定、转子均为空心的圆环,二者通过一个波浪形圆环结构的弹簧紧压在一起。定子一面粘接压电陶瓷PZT,另一面开有齿槽。PZT沿厚度方向极化,其极化分区如图2所示,图中,Δθ和Δθ1分别表示定子工作模态1/2波长和1/4波长所对应的角度。分别给A区和B区通以相位相差90°的交流电,在定子上激励出行波运动,从而推动与之接触的转子旋转。电机定子材料采用钢,转子材料为硬铝合金,定子的工作模态为B(m,n)=B(0,7),其中m代表节圆数,n代表节径数。
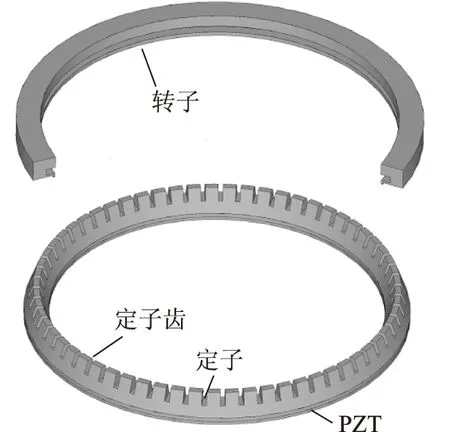
图1 中空环形超声波电机结构Fig.1 Structure of the hollow ring type ultrasonic motor
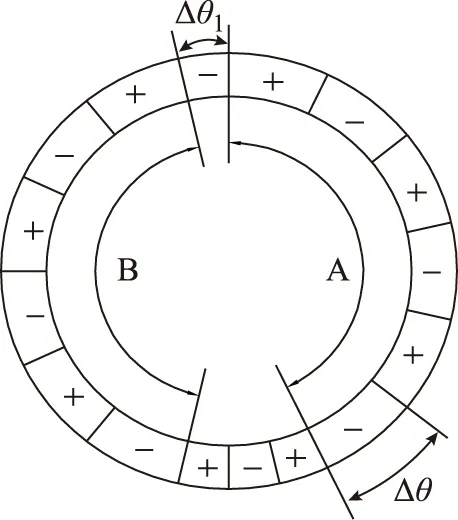
图2 PZT极化分区图Fig.2 Polarization pattern of the PZT
2 定子的自由振动
一般的环形行波超声波电机定子径向宽度较大,定子振动分析中若忽略径向的弯曲应力,往往会产生较大误差。而中空环形超声波电机定子径向宽度很小,因此可忽略径向的弯曲应力,将电机定子等效为圆环形的梁来分析。定子上带有齿槽,为简化分析,将有齿槽的梁等效为无齿槽的梁。由于定子工作于B(0,7)模态,定子上共有63个齿,即一个波长内有9个齿,因此在等效过程中,忽略定子齿的刚度,但将定子齿的质量等效到定子梁中,等效的原则是等效前后定子的动能不变[18],由此可根据定子的密度ρs得到定子梁的等效密度ρseq。等效定子梁如图3所示。
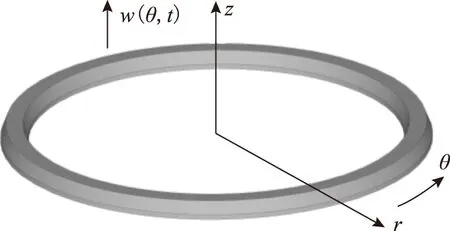
图3 等效定子梁Fig.3 Equivalent stator beam
由于定子梁的厚度与电机工作时定子振动波长相比很小,因此分析时可忽略剪切变形和转动惯量,根据振动理论,可得到定子梁在柱坐标系(r,θ,z)下自由振动的微分方程为[19]
(1)
式中,w(θ,t)为定子梁轴向振动位移;Es为定子的弹性模量;I为定子梁的截面惯性矩;r1为定子梁的平均半径;A为等效定子梁的截面积。定子自由振动方程的解可采用变量分离法得到
w(θ,t)=Wk(θ)ejωkt
(2)
式中,Wk(θ)为第k阶振动模态;ωk为第k阶振动模态对应的角频率。将式(2)代入式(1)可得
(3)
超声波电机定子梁可看成是简支梁,因此其振动模态Wk(θ)=(sin(kθ),cos(kθ)),即同一振动频率下有两个正交的模态。将振动模态sin(kθ)或cos(kθ)代入式(3)可得第k阶模态的角频率为
(4)
3 定子的受迫振动
3.1 定子受迫振动的解析解
定子梁在外加轴向作用力下的受迫振动方程可表示为
(5)
式中,c为阻尼系数;f(θ,t)代表外加轴向作用力。受迫振动方程的解可用模态叠加的方法得到
(6)
式中,qk(t)为第k阶模态参与因子。超声波电机定子工作在特定的模态Wn(θ)=(Wns(θ),Wnc(θ))=(sinnθ,cosnθ),n=7,因此可将工作模态以外的模态忽略不计,即只考虑k=n的情况,设qn(t)=(qns(t),qnc(t)),qns(t)和qnc(t)分别是振动模态sinnθ和cosnθ的模态参与因子,则定子的受迫振动响应可简化为
w(θ,t)=Wn(θ)qn(t)=qns(t)Wns(θ)+qnc(t)Wnc(θ)
(7)
模态参与因子可通过式(8)求得
(8)
其中
(9)
(10)
式中,ζn为定子工作模态振动的阻尼比;ωn为定子工作模态的角频率。当外加作用力是简谐激振力时,式(8)等号右侧可简化为
(11)
式中,ω为外加激振力的角频率;Qn只与变量θ有关。将式(11)代入式(8)求解可得
qn(t)=Λej(ωt-φ)
(12)
其中
(13)
(14)
将定子的工作模态sin(nθ)和cos(nθ)分别代入式(8)并按上述方法求解,可得定子梁在简谐激振力作用下的模态参与因子qns(t)和qnc(t),从而求得定子受迫振动的解析解。
3.2 外加电压作用下的受迫振动
设PZT沿z轴正向极化,并忽略极化分区间的间隙,由图2可知,PZT上施加的电压可表示为
(15)
式中,Vm为所加电压的幅值;H(θ)为单位阶跃函数。由于PZT厚度hp很小,在外加电压作用下,PZT内的电场分布可认为是均匀电场。在电场作用下,PZT产生伸缩运动,其横向应力大小为
(16)
式中,Ep为PZT在周向方向的弹性模量;d31为压电应变常数。该应力在定子中性层上产生的弯矩为
Mθθ=σbhphc
(17)
式中,b为PZT的径向宽度;hc为定子中性层到PZT形心的距离。该弯矩作用在定子上产生的外加作用力为[8]
(18)
将f1(θ,t)代入式(8)代替f(θ,t),并取Wn(θ)为sin(nθ),化简后可得在外加电压作用下qns(t)的方程
(19)
求解方程(19)可得
qns(t)=ΛVsin(ωt-φV)
(20)
同理可得qnc(t)为
qnc(t)=ΛVcos(ωt-φV)
(21)

wV(θ,t)=ΛVcos(ωt-nθ-φV)
(22)
通过改变激励电压的初始相位,可实现φV=0,因此式(22)又可简化为
wV(θ,t)=ΛVcos(ωt-nθ)
(23)
3.3 法向接触压力作用下的受迫振动
当电机定子激励出行波运动后,转子与定子在行波波峰处接触。施加在转子上的法向预压力是静止不动的,但由于定子的行波运动,定转子间的法向接触压力随行波的行进而行进,从而使接触压力成为作用在定子上的简谐激振力。由于电机工作时所加预压力很小,实验测量结果表明定转子间的接触未造成定子自由振动模态和频率的明显变化,因此可忽略定转子间的接触对定子自由振动模态和频率的影响。
由外加电压激励出的定子行波运动为式(23)时,定转子间法向接触压力移动的角频率为
ωp=ω/n
(24)
设法向预压力为F,将定转子间的法向接触压力集中作用在定子行波的波峰处,其在定子上产生的外加作用力可表示为
(25)
式中,δ(θ)是狄拉克δ函数。将f2(θ,t)代入式(8)代替f(θ,t),并取Wn(θ)为sin(nθ),化简后可得在法向接触压力作用下qns(t)的方程
(26)
求解方程可得
qns(t)=ΛNsin(ωt-φN)
(27)
同理可得
qnc(t)=ΛNcos(ωt-φN)
(28)
式中ΛN和φN可根据式(13)和式(14)计算得到,此时Qn=-F/(ρseqAN)。将式(27)和式(28)代入式(7)可得定子在法向接触压力作用下的受迫振动响应为
wN(θ,t)=ΛNcos(ωt-nθ-φN)
(29)
定子总的受迫振动响应为
wΣ(θ,t)=wV(θ,t)+wN(θ,t)
(30)
4 结果与分析
中空环形行波超声波电机参数如表1所示。
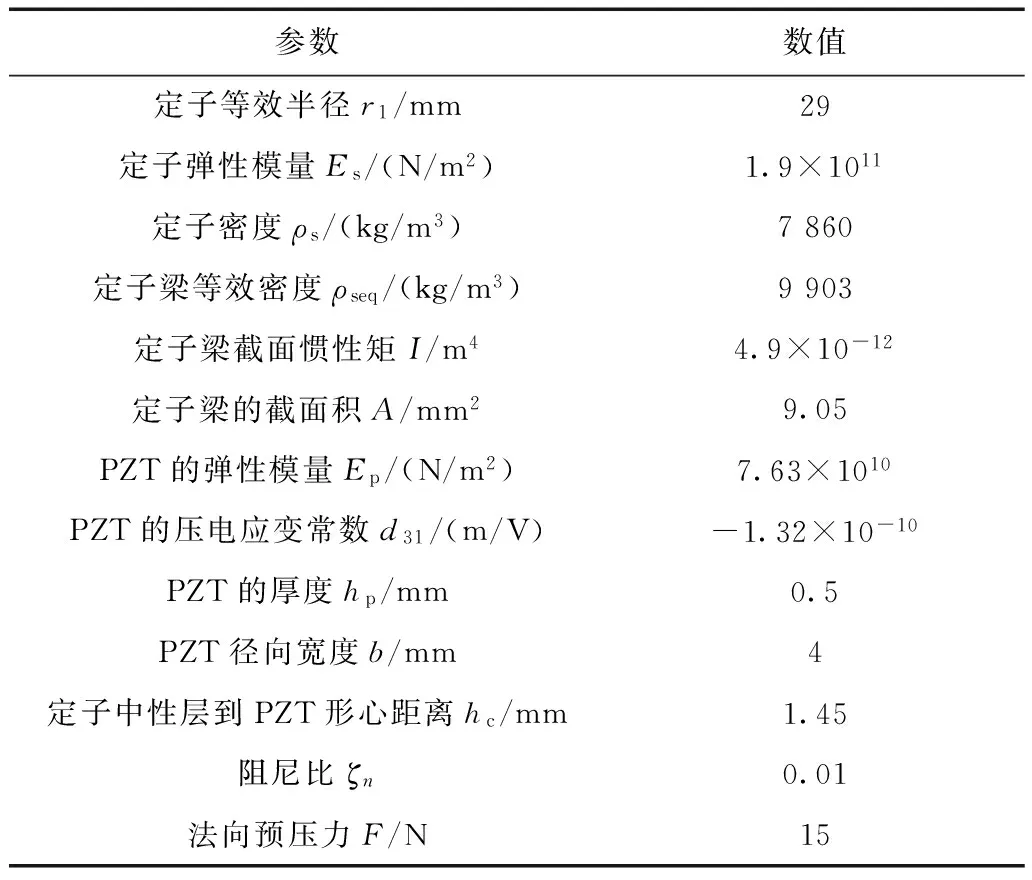
表1 中空超声波电机的参数Tab.1 The parameters of the hollow ultrasonic motor
4.1 自由振动分析结果
用所提出的模型对超声波电机定子的自由振动进行计算,并应用德国Polytec公司的激光测振仪(PSV-400-M2)对定子进行扫频测试,得到定子的自由振动模态和对应的频率,计算值和测量值如表2所示,理论分析结果与实验测试结果接近,说明定子等效处理的方法是合理的。
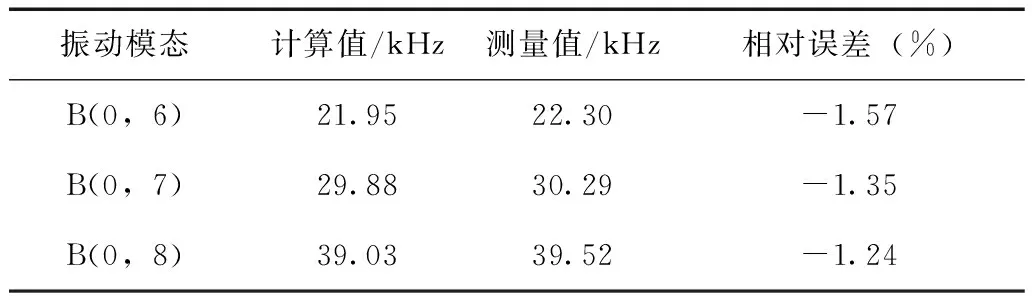
表2 定子自由振动分析结果Tab.2 Free vibration analysis results of the stator
4.2 受迫振动分析结果
首先分析定子在外加电压激励下的受迫振动。保持外加电压幅值Vm为35 V不变,激励频率f在定子工作频率点30 kHz附近变化时,外加电压激励所产生的定子振幅ΛV如图4所示。测试时单独取出定子,即定子仅有外加电压作为激振源,测试频率范围为29~31 kHz,在靠近工作频率点的29.5~30.5 kHz范围内,测量步长取0.25 kHz,其余步长取0.5 kHz。由图4可知,计算值与测量值基本吻合。在共振频率点附近,ΛV最大,偏离共振频率点时,ΛV迅速减小。当保持外加电压频率f为30 kHz不变,电压幅值Vm变化时,定子振幅ΛV的计算值和测量值如图5所示,测量电压幅值的范围为20~40 V,步长为5 V。由图5可知,计算值与测量值相吻合,且电压激励所产生的定子振幅ΛV与所施加的电压幅值Vm呈正比。计算结果也表明,由法向接触压力激励产生的振幅ΛN与预压力F呈正比。
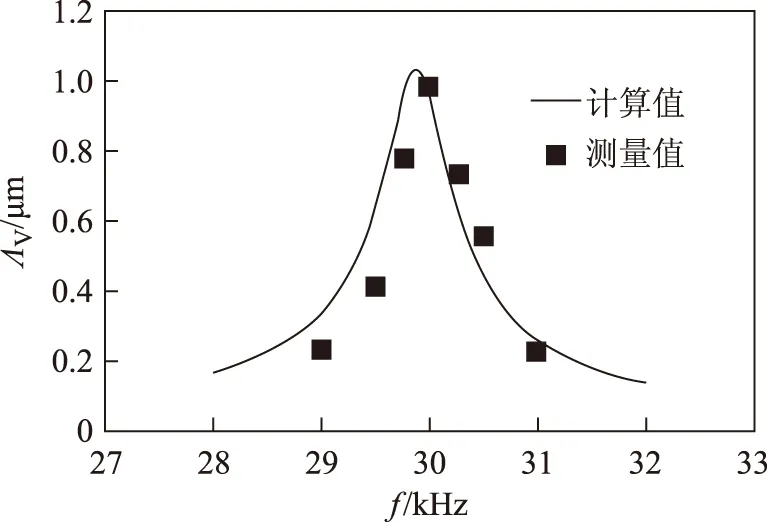
图4 不同频率下外加电压激励产生的振幅Fig.4 Vibration amplitude excited by the voltage at different frequencies
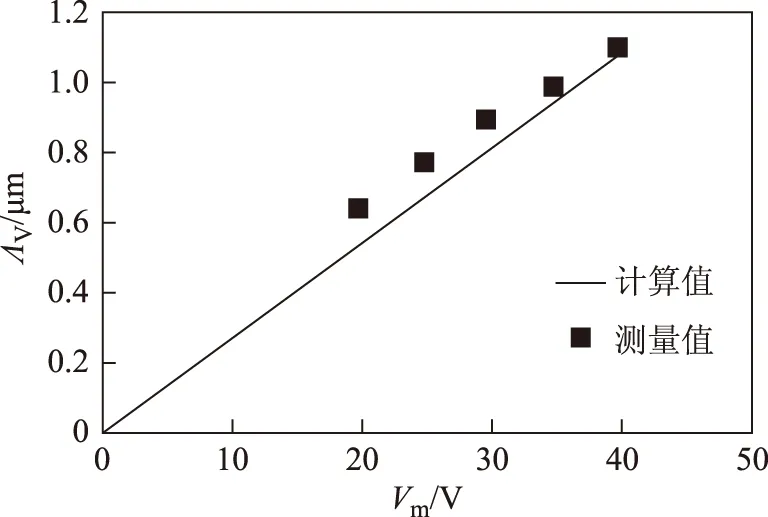
图5 不同电压幅值激励产生的振幅Fig.5 Vibration amplitude excited by the voltage at different amplitudes
组装好的电机正常工作时,所施加的电压幅值为35 V,频率为30 kHz,定转子间施加的预压力为15 N,计算得到的定子在某一固定时刻由外加电压和法向接触压力激励出的振动如图6所示,电压激励出的振幅为0.95 μm,由法向接触压力激励出的振幅是由电压激励出的振幅的7.3%,且相位不同。定子振动响应之和wΣ(θ,t)与仅由电压激励产生的振动响应wV(θ,t)差别不大,并未因叠加了wN(θ,t)而产生明显变化。由此可知,电机正常工作时,由于所施加的预压力较小,因此接触压力对定子振动的影响较小。定子振动响应之和的振幅仍为0.95 μm,根据T.Maeno等[17]对该电机正常工作时定子振动的实验测量结果,正常工作时定子振幅约为1 μm。本文理论分析结果与文献[17]的实验结果较接近,证明了所提出模型的正确性。
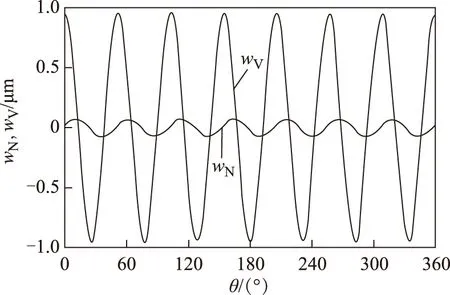
图6 定子的受迫振动响应Fig.6 Forced responses of the stator
5 结论
采用解析法对中空环形行波超声波电机定子的振动进行了分析,结果表明:
1)计算得到的定子自由振动频率与实验测量结果相吻合,说明定子等效处理的方法是合理的。
2)电压幅值不变而频率在定子共振频率点附近变化以及电压频率不变而幅值变化时,计算得到的电压激励产生的定子振幅与测量值基本吻合。
3)电压激励所产生的定子振幅与电压幅值呈正比关系,法向接触压力激励产生的定子振幅与预压力呈正比关系。
4)由于电机正常工作时所施加的预压力较小,因此接触压力对定子振动的影响较小,正常工作时接触压力激励出的振幅为电压激励出的振幅的7.3%。
5)最后将理论分析得到的定子振幅与文献[17]的实验测试结果进行了比较,二者基本吻合,说明所提出模型的正确性。
[1] 白洋,王剑,郭吉丰.基于复损耗的杆式超声波电机定子建模及其仿真[J].电工技术学报,2012,27(12):185-190. Bai Yang,Wang Jian,Guo Jifeng.Modeling and simulation of a bar-type ultrasonic motor based on loss coefficients[J].Transactions of China Electrotechnical Society,2012,27(12):185-190.
[2] 史敬灼,尤冬梅.超声波电机黄金分割自适应转速控制[J].电工技术学报,2013,28(6):59-65. Shi Jingzhuo,You Dongmei.Golden section adaptive speed control of ultrasonic motors[J].Transactions of China Electrotechnical Society,2013,28(6):59-65.
[3] Shi Jingzhuo,You Dongmei.Characteristic model of travelling wave ultrasonic motor[J].Ultrasonics,2014,54(2):725-730.
[4] 陆旦宏,胡敏强,金龙,等.基于空间调相的环形行波超声波电机的幅相控制[J].电工技术学报,2014,29(3):132-142. Lu Danhong,Hu Minqiang,Jin Long,et al.Amplitude-phase control of ring-type travelling-wave ultrasonic motors based on space phase modulation[J].Transactions of China Electrotechnical Society,2014,29(3):132-142.
[5] Hagedorn P,Wallashek J.Travelling wave ultrasonic motors,part I:working principle and mathematical modeling of the stator[J].Journal of Sound and Vibration,1992,155(1):31-46.
[6] Hagedorn P,Wallashek J,Konrad W.Travelling wave ultrasonic motors,part II:a numerical method for the flexural vibrations of the stator[J].Journal of Sound and Vibration,1993,168(1):115-122.
[7] Kagawa Y,Tsuchiya T,Kataoka T,et al.Finite element simulation of dynamic responses of piezoelectric actuators[J].Journal of Sound and Vibration,1996,191(4):519-538.
[8] Friend J R,Stutts D S.The dynamics of an annular piezoelectric motor stator[J].Journal of Sound and Vibration,1997,204(3):421-437.
[9] 夏长亮,郑尧,史婷娜,等.行波接触型超声波电机定子振动有限元分析[J].中国电机工程学报,2001,21(2):25-28,32. Xia Changliang,Zheng Yao,Shi Tingna,et al.FEM analysis on stator vibration of traveling wave type contact ultrasonic motor[J].Proceedings of the CSEE,2001,21(2):25-28,32.
[10]莫岳平,胡敏强,徐志科,等.超声波电机振动模态有限元分析[J].中国电机工程学报,2002,22(11):92-96. Mo Yueping,Hu Minqiang,Xu Zhike,et al.The finite element analysis on the vibration mode of ultrasonic motor[J].Proceedings of the CSEE,2002,22(11):92-96.
[11]莫岳平,胡敏强,金龙,等.振动模态与超声波电机性能关系的研究[J].电工技术学报,2002,17(3):7-11. Mo Yueping,Hu Minqiang,Jin Long,et al.Research on the relation between vibration mode and ultrasonic motor’s performance[J].Transactions of China Electrotechnical Society,2002,17(3):7-11.
[12]Sun D,Liu J B,Ai X.Modeling and performance evaluation of traveling wave piezoelectric ultrasonic motors with analytical method[J].Sensors and Actuators A:Physical,2002,100(1):84-93.
[13]Pons J L,Rodriguez H,Ceres R,et al.Novel modeling technique for the stator of traveling wave ultrasonic motors[J].IEEE Transactions on Ultrasonics,Ferroelectrics and Frequency Control,2003,50(11):1429-1435.
[14]Yao Z Y,Zhao C S,Zeng J S,et al.Analytical solution on the non-linear vibration of a traveling wave ultrasonic motor[J].Journal of Electroceramics,2008,20(3-4):251-258.
[15]王光庆,陆国丽,郭吉丰.基于能量等效的行波型超声波电动机解析模型[J].机械工程学报,2008,44(2):74-81. Wang Guangqing,Lu Guoli,Guo Jifeng.Analytical model of traveling-wave type ultrasonic motor based on the energy equivalent method[J].Chinese Journal of Mechanical Engineering,2008,44(2):74-81.
[16]张炜,李胤,杨正伟,等.预应力对超声电机定子振动影响分析[J].微电机,2014,47(9):18-21,31. Zhang Wei,Li Yin,Yang Zhengwei,et al.Affect of pre-pressure on ultrasonic motor stator vibration[J].Micromotors,2014,47(9):18-21,31.
[17]Maeno T,Bogy D B.FE analysis and LDA measurement of the dynamic rotor/stator contact in a ring-type ultrasonic motor[J].Journal of Tribology,1993,115(4):625-631.
[18]陈永校,郭吉丰.超声波电动机[M].杭州:浙江大学出版社,1994.
[19]Soedel W.Vibrations of shells and plates[M].3rd ed.New York:Marcel Derkker,2004.
An Analytical Model of the Stator Vibration in the Hollow Ring Type Traveling Wave Ultrasonic Motor
JiangChunrong1LuDanhong1JinLong2
(1.School of Electric Power Engineering Nanjing Institute of Technology Nanjing 211167 China 2.School of Electrical Engineering Southeast University Nanjing 210096 China)
An analytical model of the stator vibration in the hollow ring type traveling wave ultrasonic motor is proposed in order to investigate the impact of the contact between the stator and the rotor on the stator vibration.The stator is equivalent to a circular ring beam with constant thickness according to the structure of the motor.In the equivalent process,the stiffness of the stator teeth is neglected.But the mass contribution of the teeth is lumped into the mass of the stator beam.The free vibration and the forced vibration of the equivalent stator beam are then analyzed based on the analytical method.Different vibration modes and the corresponding frequencies are determined.The forced responses of the stator excited by the applied harmonic voltage and the normal contact force are obtained.The results indicate that the equivalent process is reasonable.The vibration amplitudes of the stator excited by the applied voltage and the normal contact force are linear to the voltage amplitude and the preload force,respectively.The impact of the contact force on the vibration of the stator is relatively small as the value of the preload force is low.The analytical results are compared with the experimental results and good agreements are observed,which verifies the validity of the proposed model.
Ultrasonic motor,stator vibration,analytical model,contact force
国家自然科学基金(51177014),江苏省自然科学基金(BK20140766),江苏省高校自然科学研究项目(14KJD470004)和南京工程学院校级科研基金(YKJ201317)资助项目。
2014-12-03 改稿日期2015-01-25
TM35
蒋春容 女,1983年生,博士,讲师,研究方向为超声波电机建模及控制。(通信作者)
陆旦宏 男,1978年生,副教授,研究方向为超声波电机设计及控制。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学杂志(2022年2期)2022-09-27
防爆电机(2021年1期)2021-03-29
物理教学探讨(2018年10期)2018-12-27
中学物理·高中(2018年11期)2018-12-20
测控技术(2018年2期)2018-12-09
成都信息工程大学学报(2018年1期)2018-05-31
电机与控制应用(2015年10期)2015-03-01
广西科技大学学报(2015年4期)2015-02-27
电力工程技术(2014年1期)2014-03-20