直流多落点系统自抗扰附加阻尼控制
2015-04-06 06:33:53李从善刘天琪刘利兵李兴源李文峰
电工技术学报 2015年7期
李从善 刘天琪 刘利兵 李兴源 李文峰
(1.四川大学电气信息学院 成都 6100652.国网河南省电力公司经济技术研究院 郑州 450052)
直流多落点系统自抗扰附加阻尼控制
李从善1刘天琪1刘利兵1李兴源1李文峰2
(1.四川大学电气信息学院 成都 6100652.国网河南省电力公司经济技术研究院 郑州 450052)
提出将自抗扰控制技术应用到直流多落点系统,通过其附加控制以提高系统的阻尼水平。首先采用扰动测试法,找出系统的最佳控制地点。然后采用总体最小二乘-旋转不变技术(TLS-ESPRIT)辨识出系统数学模型,根据奇异值降阶理论对系统降阶,降阶后得到二维低阶被控系统,并将其转换为状态空间形式,据此设计出抑制系统低频振荡的HVDC自抗扰附加阻尼控制器。由于自抗扰控制技术具有对系统扰动实时估计性能,并将估计出的实时扰动量补偿到控制中去,因此该控制器具有比现有常规控制器抗扰动能力强的优点。以三直流三机和四机两区域系统为例进行时域仿真,结果表明HVDC自抗扰附加控制器相比传统PID控制器具有更强的鲁棒性。
自抗扰控制器 直流多落点系统 低频振荡 汉克尔奇异值降阶
0 引言
直流作为大规模远距离送电手段,因具有高效、经济及快速可控等优点而得到广泛应用[1]。通过直流联络线附加控制可增加对交流系统机电振荡的阻尼,提高系统稳定性[2]。国内外学者在直流系统参与电网稳定控制领域开展了大量研究。主要集中在反馈线性化方法[3-5]、滑模变结构控制[6-9]、非线性鲁棒控制[10-12]及非线性自适应控制[12,13]。上述控制方法对交直流系统稳定性具有明显改善,但对模型摄动强烈、系统模型参数不准确或存在大的扰动情况,其控制能力具有一定局限性。滑模变结构控制对系统参数的摄动和外部干扰具有较强的鲁棒性,其缺点在于控制规律因高速切换而存在高频抖动。
自抗扰控制技术(Active Disturbance Rejection Control,ADRC)[14-18]由中国科学院数学与系统科学研究院系统科学研究所研究员韩京清提出,该控制方法以PID控制为基础并加以改进形成。通过对整定值设置合适的过渡过程,一定程度上解决了控制超调和快速性之间的矛盾;将传统PID控制的误差反馈线性组合形式发展到非线性形式,可实现比例、积分、微分三者的最佳组合方式;并采用扩张状态观测器实时估计出系统扰动,将其补偿到控制中,提高了控制的抗扰动性能和鲁棒性能。因此ADRC控制具有“超调小、响应速度快、抗扰性强”等优点。对自抗扰控制器的基本原理和结构进行了详细分析,并将其运用到直流附加控制上,以提高系统的稳定性。在PSCAD中搭建三直流三机系统,采用TLS-ESPRIT辨识方法辨识出系统数学模型,根据奇异值降阶理论将系统降为二阶系统,然后转换为状态空间形式,以此设计出自抗扰控制器,并在直流传统主控制基础上搭建自抗扰附加控制器。通过与传统PID控制进行对比,验证了该方法具有很强的鲁棒性。由于该控制方法能够对系统的内外扰动进行实时的估计补偿,因此将高阶被控系统降为二阶系统所带来的系统模型不准确性可由扩张状态观测器加以补偿,这样可使被控系统的维数很低,给控制器的设计带来方便。因此具有较好的实用性。
1 自抗扰控制器基本原理
1.1 自抗扰控制器基本思想
自抗扰控制器的核心是将系统的不确定部分和内扰外扰扩张成系统的状态量,并依此建立扩张状态观测器,估计其对系统的实时作用量,进而补偿到控制器中,从而实现反馈线性化[18]。由此,将非线性系统转换为标准线性系统的积分串联型系统。设系统数学模型的一般表达式为
(1)

(2)
选择控制量为
(3)
则非线性系统可转换为线性系统
(4)
1.2 自抗扰控制器结构及各部分功能
以二阶自抗扰控制器为例,其控制结构如图1所示。由4部分构成:
1)安排过渡过程。由整定值v0安排过渡过程v1并得到其微分信号v2,采用跟踪微分器(Tracking Differentiator,TD)实现。对整定值安排合适的过渡过程,可在一定程度上解决超调和快速性之间的矛盾。
2)扩张状态观测器(Extended State Observer,ESO)。根据被控对象的输出y和输入u估计对象的状态量z1、z2和作用于对象的总和扰动量z3。
3)状态误差的非线性反馈(Nonlinear State Error Feedback,NLSEF)。状态误差e1=v1-z1,e2=v2-z2,由误差e1、e2的非线性组合确定控制量u0。
4)扰动估计补偿。将扰动估计值z3补偿到反馈控制量u0中形成最终控制量u。
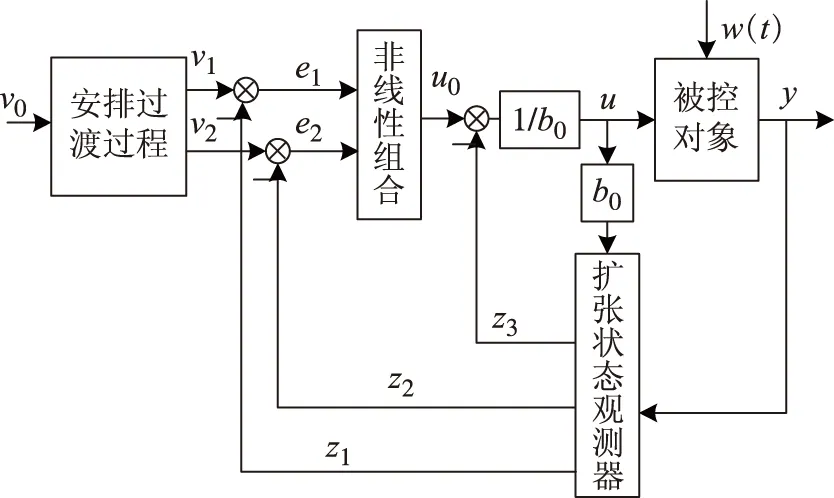
图1 自抗扰控制器结构图Fig.1 ADRC structure
2 直流多落点系统控制敏感点确定
由文献[19,20]可知,对于直流多落点系统,由于直流在系统中所处位置的不同会影响其附加控制对系统振荡的抑制效果。因此,当系统存在扰动时,采用HVDC附加控制对系统振荡抑制时,必存在最佳的一条HVDC,即控制敏感点。控制敏感点的选取可通过控制敏感因子指标来确定。其计算式为
(5)
式中,Δδ为主振模态对应的强相关机组的功角变化量;ΔP为直流参考功率施加的扰动量。控制敏感因子越大,即在该直流施加附加控制,其抑制振荡效果越好。具体求取步骤如下:
1)通过TLS-ESPRIT算法[21]辨识得到系统振荡模态,并筛选出主振模态,选出与主振模态相对应的强相关机组。
2)分别在不同直流上施加相同扰动ΔP,测出强相关机组间的功角变化量。
3)计算控制敏感因子,控制敏感因子最大值对应的直流为最佳的控制地点。
[20],在PSCAD中搭建三直流三机输电系统,拓扑结构如图2所示。该系统中,三条直流线路均采用标准的CIGRE模型,直流系统主控制器采用传统PI控制,控制方式为整流侧定直流电流、逆变侧定关断角。直流线路每回功率为Pdc=1 000 MW,Vdc=500 kV。发电机模型均采用详细六阶模型且都包含励磁和调速系统,都未装电力系统稳定器。发电机G1和G3的额定容量相等为700 MV·A,G2为512 MV·A。惯性时间常数H=6.5。
在图2所示的仿真系统中施加扰动,1 s时节点4突然失去负荷,持续0.5 s后恢复。分别测出G1、G2、G3的功角变化曲线如图3所示。
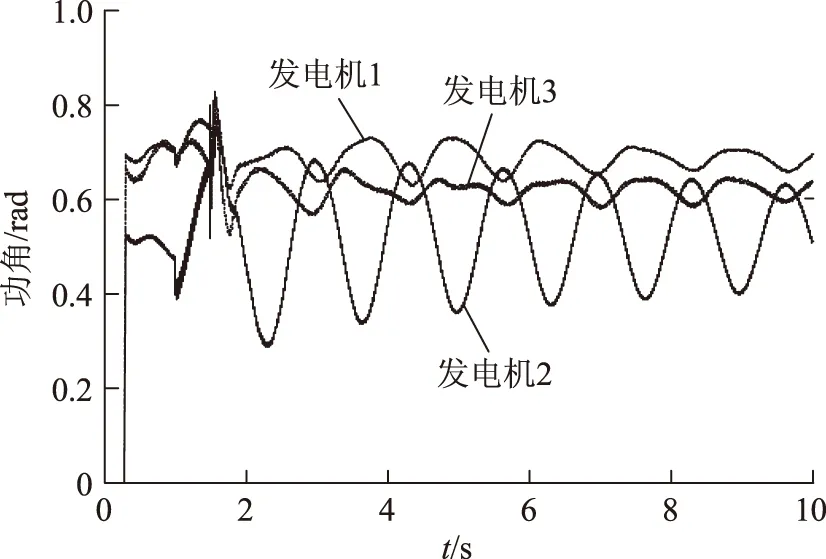
图3 3台发电机功角振荡曲线Fig.3 Power angle curves of three generators
采用prony辨识方法得到系统的主振模态及各台发电机的初相角,如表1所示。

表1 三直流三机系统主振模式Tab.1 Oscillation modes of three HVDC transmission system with three alternators
由表1可见,发电机G2初相角与G1、G3相差近180°。以G2与G1、G3频率差为观测目标,在无直流附加控制下,分别在3条直流上施加50 MW的功率波动,选取Δω23为观测目标。通过式(5)计算得到各条直流的控制敏感因子如表2所示。
由表2可见,HCDC3的控制敏感因子明显大于HVDC1和HVDC2,由此得出HVDC3是系统的最佳控制点。
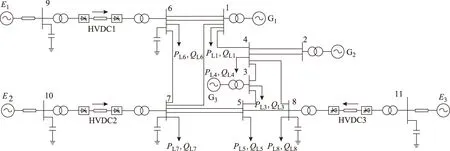
图2 三直流三机输电系统
Fig.2 Three HVDC transmission system with three alternators

表2 三直流三机系统控制敏感因子Tab.2 Control sensitive factor of three HVDC transmission system with three alternators
3 直流多落点系统自抗扰附加控制器设计
3.1 系统模型辨识
在图2所示直流系统整流侧定电流控制信号上施加阶跃扰动作为输入信号,以发电机G2与G3转子角速度偏差Δω23为输出。采用TLS-ESPRIT算法辨识系统的数学模型。以HVDC3直流为例,辨识得到传递函数为
(6)
式中,y为角速度偏差Δω23。系统的零极点分布如图4所示。
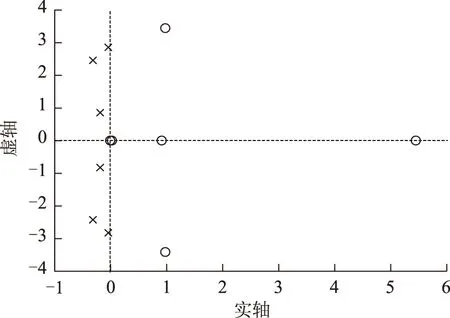
图4 零极点分布Fig.4 Pole-zero map
采用汉克尔奇异值降阶理论对系统降阶。首先计算每个模态的相对能量,如图5所示。

图5 汉克尔奇异值Fig.5 Hankel singular values
汉克尔奇异值反映了所对应的状态量对系统输入/输出的影响。较小的汉克尔奇异值,其所对应的状态量对系统影响较小,将4个较小的汉克尔奇异值对应的状态量剔除,得到二阶传递函数为
(7)
降阶前后系统的阶跃响应如图6所示。由图6可知,阶跃响应曲线虽然存在一定偏差,但保留了系统的主要特征,而由降阶导致的系统模型的不确定性,可通过扩张状态观测器对其补偿。
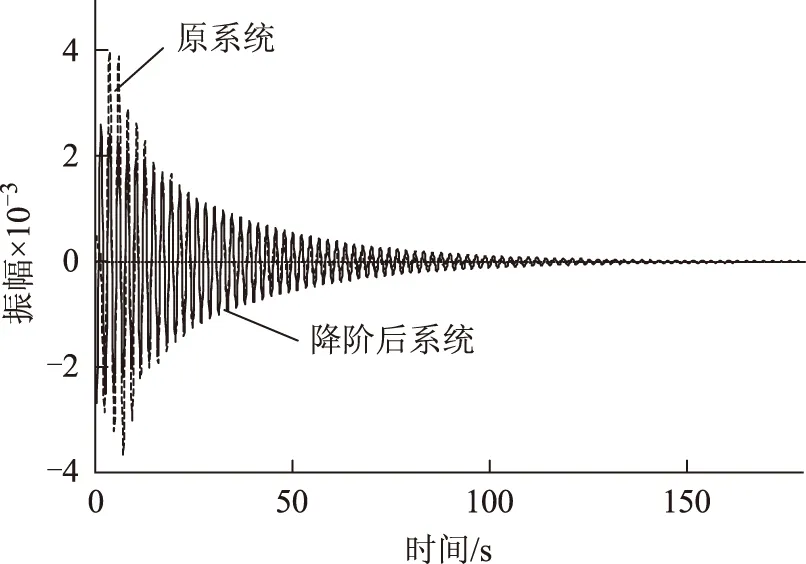
图6 系统降阶前后阶跃响应Fig.6 Step response of controller and reduced-order controller of the system
3.2 自抗扰附加控制器设计
以降阶得到的二阶传递函数为控制对象,首先将传递函数转换为微分方程形式为
(8)
式中,a1=0.034 82,a0=8.306,b2=0.000 655 8,b1=0.007 66,b0=-6.276×10-18。令u1=0,若系统存在外扰以及由参数摄动引起的系统的不确定部分,统记为w(t)。则式(8)变为
(9)

(10)
式中,a(t)为w(t)的导数。对式(10)建立扩张状态观测器为
(11)
式中,z1、z2和z3分别为状态量x1、x2和x3的观测值;β1、β2、β3为一组观测器参数;fal(·)是非光滑函数
(12)
式中,0<α≤1,一般情况下取1;δ由采样步长决定。
采用TD算法对整定值安排过渡过程
(13)
式中,h为采样频率;r0为决定过渡过程快慢的参数,函数fhan(x1,x2,r0,h)算法为
(14)
控制量u0通过误差的NLSEF得到
(15)
式中,c、r、h1为可调参数;fhan算法同式(14)。
通过将观测器估计出的系统扰动补偿到控制量u0中,形成最终控制量u
(16)
自抗扰附加控制器控制结构如图7所示。

图7 HVDC自抗扰附加控制器结构图Fig.7 Diagram of ADRC of HVDC systems
3.3 自抗扰控制器参数整定
自抗扰控制器涉参数较多,但从自抗扰控制器的原理和结构看,自抗扰控制器的各组成部分独立地实现相应的功能,可按照“分离性原理”独立整定参数,以简化自抗扰控制器的设计[18]。由分离性原则最终可确定ADRC参数整定公式为
(17)
由此,除扰动补偿因子b0外,其他参数都可通过式(17)得到。参数b0一般取与系统参数b相等,且适当加大b0值可有效补偿扰动和模型的不确定因素。
3.4 传统PID控制器设计
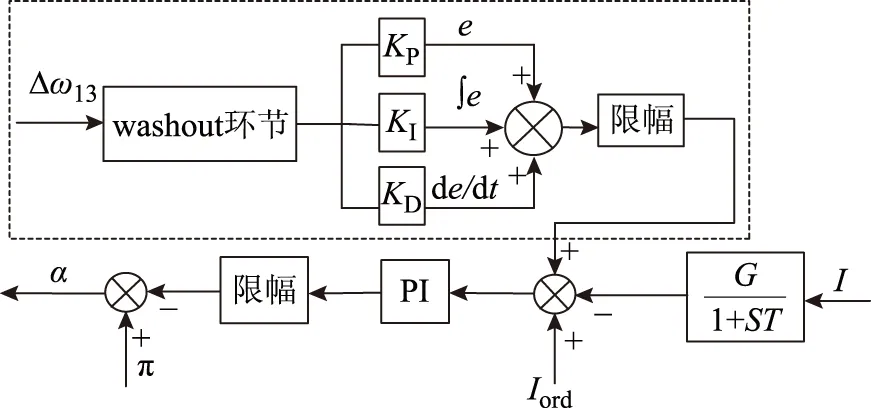
图8 传统PID控制器结构图Fig.8 Structure diagram of traditional PID controller
4 仿真分析
4.1 控制敏感点验证
2s时刻,母线4处发生三相短路故障,持续0.5s
恢复。以发电机G2、G3的转子角速度偏差变化作为控制目标,分别在无直流调制下和三条直流分别调制时进行仿真,直流调制采用经典PID控制。控制效果如图9所示。
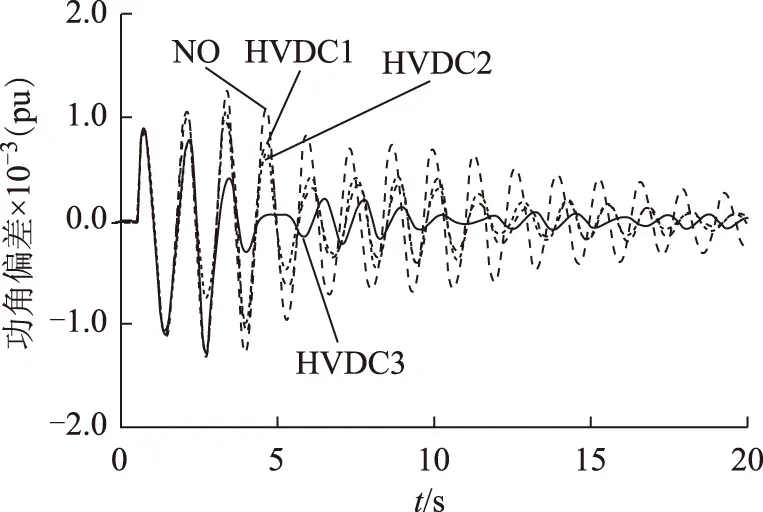
图9 不同直流调制下Δω23Fig.9 Diagram of Δω23 under different DC modulation
由图9可见,各条直流附加控制均一定程度上对系统振荡起到了抑制效果,但HVDC3抑制效果明显好于HVDC2和HVDC1。验证了控制敏感点选取的正确性。
4.2 传统PID控制与ADRC控制效果对比
1)仿真分析1
为验证ADRC方法的有效性,在图2的仿真系统中分别施加两种形式的扰动,与传统的PID控制进行对比。仿真时PID控制器参数比例增益KP=50,积分时间常数Ti=11 s,微分时间常数Td=2.7 s。ADRC控制器的参数r0=1,[β1,β2,β3]=[100,3 333,313],r=5 000,h1=0.05,b0=1。
扰动1:1 s时节点4突然失去负荷,持续0.5 s后恢复。由扩张观测器估计的实时扰动量z3如图10所示。自抗扰控制器与传统PID控制器对系统振荡的抑制效果对比如图11所示。
扰动2:2s时刻,整流侧定电流控制器的电流整定值由1pu减小至0.95pu。由扩张观测器估计的实时扰动量z3如图12所示。自抗扰控制器与传统PID控制器对区域间低频振荡的抑制效果对比如图13所示。
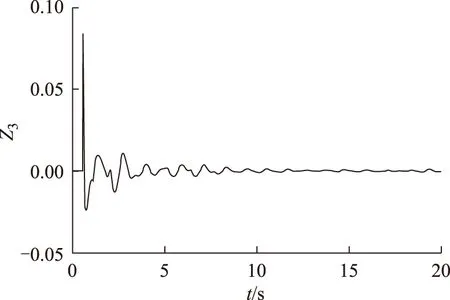
图10 扰动1时z3Fig.10 Diagram of z3 under the first disturbance
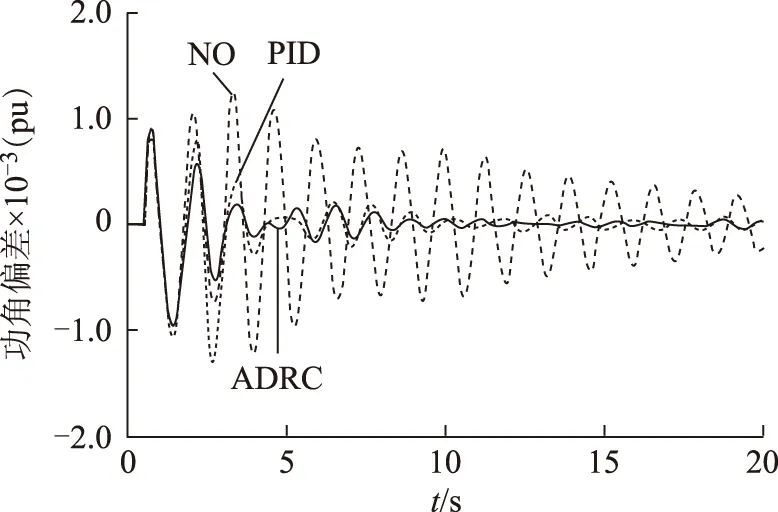
图11 扰动1时Δω23Fig.11 Diagram of Δω23 under the first disturbance
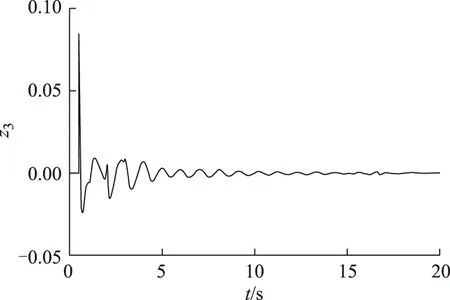
图12 扰动2时z3Fig.12 Diagram of z3 under the second disturbance
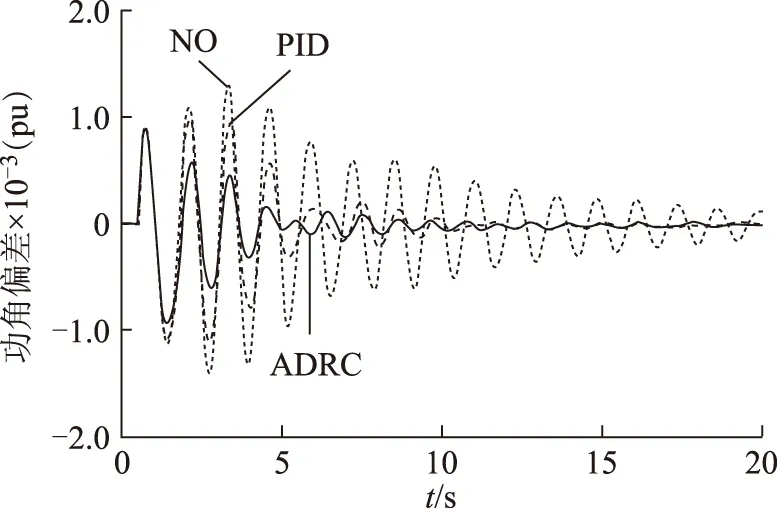
图13 扰动2时Δω23Fig.13 Diagram of Δω23 under the second disturbance
由图11、图13可见,当系统发生扰动时,传统PID和ADRC都对系统的振荡均具有抑制效果。但相比传统PID控制器,HVDC自抗扰附加控制器具有超调小、稳定快的优点,证明了该控制器的有效性和鲁棒性。
2)仿真分析2
为进一步验证ADRC控制器的适应性,以四机两区域交直流并联系统为例,系统网络结构和详细参数见文献[22],仿照算例分析1,分别搭建PID控制器和ADRC控制器,以发电机G1和发电机G3的转子角速度偏差变化作为控制目标,施加两种形式的扰动,对比分析两种控制器的控制效果。
扰动1:3s时刻,整流侧定电流控制器的电流整定值由1pu减小至0.95pu。两种控制器的控制效果如图14所示。
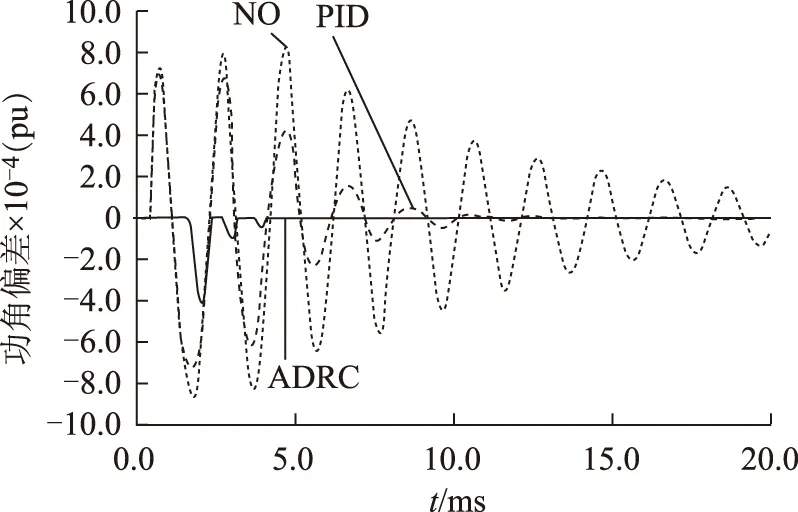
图14 扰动1时Δω13Fig.14 Diagram of Δω13 under the first disturbance
扰动2:3s时刻,换流站2靠近母线节点发生单相短路接地故障,故障持续时间为0.1s。两种控制器的控制效果如图15所示。

图15 扰动2时Δω13Fig.15 Diagram of Δω13 under the second disturbance
通过对四机两区域交直流并联系统的进一步仿真分析,结果表明在直流附加控制中使用ADRC控制器可以提高系统阻尼水平的适用性和鲁棒性。
5 结论
针对直流输电系统简化模型存在误差以及现有控制器抗扰能力不足的问题,提出直流自抗扰附加控制器设计方法。由TLS-ESPRIT辨识出系统模型,根据奇异值理论对系统模型进行降阶。以降阶后的系统模型为基础,设计出抑制直流多落点系统低频振荡的HVDC自抗扰控制器。
ADRC是PID控制的改进,保留了其基于误差消除误差的精髓,并对整定值安排适当的过渡过程,一定程度上可消除控制的超调量;采用扩张状态观测器对系统的实时扰动量进行补偿,实现控制的反馈线性化,并拓宽了控制器对参数摄动的适应性。采用非线性反馈的适当组合,是对以往线性组合的一种改进,可实现寻求更适合更有效的组合形式。因此,具有超调小、响应速度快、控制准确度高、抗扰性强等优点。该控制器由于对模型的不确定性和内外扰动具有实时补偿作用,因此对系统模型的准确性要求不高,该优点是其他需要以系统准确数学模型为基础的控制方法所不具备的。需要说明的是,虽然该控制器不需要准确的数学模型,但系统数学模型越准确越能减轻观测器的负担。
以三直流三机输电系统和四机两区域交直流并联系统为例进行了时域仿真,结果表明HVDC自抗扰附加控制器比传统PID控制器具有更好的控制效果。被控系统采用奇异值理论降阶后,系统模型更低,以此设计的控制器阶数更低,便于工程实现。因此该控制方法具有一定的实用价值。
参考文献
[1] 郭小江,马世英,卜广全,等.直流系统参与电网稳定控制应用现状及在安全防御体系中的功能定位探讨[J].电网技术,2012,36(8):116-123.GuoXiaojiang,MaShiying,BuGuangquan,etal.PresentapplicationsituationofDCsystemparticipatinginpowersystemstabilitycontrolanddiscussiononpositionofitsfunctionsinsecuritydefensesystem[J].PowerSystemTechnology,2012,36(8):116-123.
[2] 李兴源.高压直流输电系统的运行与控制[M].北京:科学出版社,2010.
[3] 李洁,孔维超,钟彦儒.一种不引入零动态的异步电机反馈线性化控制[J].电工技术学报,2014,29(1):110-115.LiJie,KongWeichao,ZhongYanru.Feedbacklinearizationcontrolofinductionmachineswithoutintroducingzerodynamics[J].TransactionsofChinaElectrotechnicalSociety,2014,29(1):110-115.
[4] 王利兵,毛承雄,陆继明,等.基于反馈线性化原理的直驱风力发电机组控制系统设计[J].电工技术学报,2011,26(7):1-6,20.WangLibing,MaoChengxiong,LuJiming,etal.Feedback-linearizationcontrolofdirect-drivenpermanentmagnetsynchronousgeneratorwindturbines[J].TransactionsofChinaElectrotechnicalSociety,2011,26(7):1-6,20.
[5] 翁华,徐政,许烽,等.基于广域测量信息的HVDC鲁棒控制器设计[J].中国电机工程学报,2013,33(4):103-109.WengHua,XuZheng,XuFeng,etal.RobustdesignofHVDCsupplementarycontrollersbasedonWAMSsignals[J].ProceedingsoftheCSEE,2013,33(4):103-109.
[6]HuertaH,LoukianovAG,CanedoJM.Robustmultimaclainepowersystemscontrolviahighorderslidingmodes[J].ElectricPowerSystemsResearch,2011,8l(7):1602-1609.
[7]HuertaH,LoukianovAG,CaedoJM.Decentralizedslidingmodeblockcontrolofmultimachinepowersystems[J].InternationalJournalofElectricalPower&EnergySystems,2010,32(1):1-11.
[8] 郭旭刚,金新民,马添翼,等.电网不平衡下基于滑模变结构的三相电压型PWM整流器恒频控制[J].电力系统保护与控制,2013,41(10):126-133.GuoXugang,JinXinmin,MaTianyi,etal.Constantfrequencycontrolforthree-phasevoltagePWMrectifierunderunbalancedgridvoltageconditionsbasedonslidingmodecontrol[J].PowerSystemProtectionandControl,2013,41(10):126-133.
[9]LiY,RehtanzC,RubergS,etal.Wide-arearobustcoordinationapproachofHVDCandFACTScontrollersfordampingmultipleinterareaoscillations[J].IEEETransactionsonPowerDelivery,2012,27(3):1096-1105.
[10]阮阳,袁荣湘,万黎,等.同步发电机的非线性鲁棒电压控制[J].电工技术学报,2012,27(9):9-16.RuanYang,YuanRongxiang,WanLi,etal.Nonlinearrobustvoltagecontrolforsynchronousgenerators[J].TransactionsofChinaElectrotechnicalSociety,2012,27(9):9-16.
[11]LiYong,RehtanzC,RübergS,etal.Wide-arearobustcoordinationapproachofHVDCandFACTScontrollersfordampingmultipleinterareaoscillations[J].IEEETransactionsonPowerDelivery,2012,27(3):1096-1105.
[12]SatoM,HonjoN,YamajiK,etal.HVDCconvertercontrolforfastpowerrecoveryafterACsystemfault[J].IEEETransactionsonPowerDelivery,1997,12(3):1319-1326.
[13]RostamkolaiN,PhadkeAG,LongWf,etal.AnadaptiveoptimalcontrolstrategyfordynamicstabilityenhancementofAC/DCpowersystems[J].IEEETransactionsonPowerSystems,1988,3(3):1139-1145.
[14]韩京清.自抗扰控制技术[J].前沿科学,2007,1(1):24-31.HanJingqing.Autodisturbancerejectioncontroltechnique[J].FrontierScience,2007,1(1):24-31.
[15]邓文浪,令弧文娟,朱建林.应用自抗扰控制器的双级矩阵变换器闭环控制[J].中国电机工程学报,2008,28(18):13-19.DengWenlang,LinghuWenjuan,ZhuJianlin.Closed-controlfortwo-stagematrixconverterbasedonauto-disturbancerejectioncontroller[J].ProceedingsoftheCSEE,2008,28(18):13-19.
[16]韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,2002,9(3):13-18.HanJingqing.FromPIDtechniquetoactivedisturbancesrejectioncontroltechnique[J].ControlEngineeringofChina,2002,9(3):13-18.
[17]丁祖军,刘保连,张宇林.基于自抗扰控制技术的有源电力滤波器直流侧电压优化控制[J].电网技术,2013,37(7):2030-2034.DingZujun,LiuBaolian,ZhangYulin.OptimalcontrolforDCsidevoltageofactivepowerfilterbasedonAuto-Disturbancerejectioncontrol[J].PowerSystemTechnology,2013,37(7):2030-2034.
[18]韩京清.自抗扰控制技术-估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2013:255-261.
[19]王曦,李兴源,王渝红,等.基于TLS-ESPRIT辨识的多直流控制敏感点研究[J].电力系统保护与控制,2012,40(19):121-125.WangXi,LiXingyuan,WangYuhong,etal.Analysisoncontrollabilitysensitivepointsofmulti-HVDCsystemsbasedonTLS-ESPRITmethod[J].PowerSystemProtectionandControl,2012,40(19):121-125.
[20]郭利娜,刘天琪,程道卫,等.直流多落点系统控制敏感点挖掘技术研究[J].电力系统保护与控制,2013,41(10):7-12.GuoLina,LiuTianqi,ChengDaowei,etal.Studyondiggingthemostsensitivecontrolpointofmulti-terminalHVDCsystem[J].PowerSystemProtectionandControl,2013,41(10):7-12.
[21]蒋平,吴熙,罗曦.基于TLS-ESPRIT算法的附加励磁阻尼控制抑制次同步振荡[J].电力自动化设备,2009,29(10):25-29.JiangPing,WuXi,LuoXi.SSOmitigationusingsupplementaryexcitationdampingcontrollerbasedonTLS-ESPRIT[J].ElectricPowerAutomationEquipment,2009,29(10):25-29.
[22]KunderP.Powersystemstabilityandcontrol[M].NewYork:McGraw-Hill,1994.
李从善 男,1985生,博士研究生,研究方向为电力系统扰动监测及稳定与控制方面的研究。
刘天琪 女,1962生,教授,博士生导师,研究方向为高压直流输电、电力系统稳定与控制方面的研究。(通信作者)
A Auto-disturbance Rejection Controller of Multi-HVDC
LiCongshan1LiuTianqi1LiuLibing1LiXingyuan1LiWenfeng2
(1.Electrical Engineering and Information College of Sichuan University Chengdu 610065 China 2.State Grid Electric Power Company of Henan Province Economic and Technology Research Institute Zhengzhou 450052 China)
The auto-disturbance rejection control(ADRC) technique is applied to the multi-HVDC system’s supplementary control to improve the damping level of system.Firstly,the best place of the control system is found using the disturbance test method.Then the total least squares estimation of the rotational invariance technique (TLS-ESPRIT) is used to identify the mathematical model of the system.Based on the singular value reduction theory,the system has been reduced to the two-dimensional low order system and transformed into a state space form.The ADRC supplementary damping controller for HVDC system’s low frequency oscillation is then designed.Because ARDC technique can estimate the disturbance of the system in real-time,which can also be compensated to the control system in real time,the controller has better anti disturbance ability than the existing conventional controller.A system with three HVDC and three generators is used as an example for the time domain simulation.The results show that the robustness of the ADRC controller for HVDC is higher than that of the traditional PID controller.
Auto disturbance rejection controller,multi-HVDC system,low frequency oscillation,singular value theory
国家电网公司科技重大专项(SGCC-MPLG027-2012)资助项目。
2014-11-15 改稿日期2015-01-14
TM7
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
应用数学(2020年4期)2020-12-28 00:36:52
数学物理学报(2019年4期)2019-10-10 02:38:56
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电源技术(2015年11期)2015-08-22 08:50:58
电源技术(2015年11期)2015-08-22 08:50:38
空间控制技术与应用(2015年2期)2015-06-05 12:24:55
航空学报(2015年4期)2015-05-07 06:43:34