
某飞行器动态特性分析
2015-04-03 06:51魏树孝王刘星
教练机 2015年4期
张 鹏,傅 强,高 辉,魏树孝,欧 军,王刘星
(1.中航工业洪都,江西 南昌330024;2.驻320厂军事代表室,江西 南昌330024)
0 引 言
飞行器的动态特性是指它在受到扰动作用后或当操纵机构产生偏转时所发生的扰动运动特性,也称稳定性和操纵性。动态特性分析就是将飞行器看作质点系来研究其运动情况,不仅要考虑作用在质心上的力,还要考虑围绕质心的力矩,研究飞行器在干扰力和干扰力矩的作用下,能否保持原来的飞行状态,以及在操纵机构作用下,飞行器改变飞行状态的能力如何,也就是研究其稳定性和操纵性问题。动态特性与飞行器设计直接相关,它涉及到气动外形的选择、结构布局的安排,以及制导系统参数的确定等。因此,动态特性分析是飞行器总体设计、制导系统设计和准确度分析的基础。
1 研究方法
动态特性的研究方法主要有经典控制理论和现代控制理论两种,本文拟采用经典控制理论进行研究。
经典控制理论是以单输入—单输出的常参量系统作为重要研究对象,以传递函数为系统基本的数学描述形式,研究系统的稳定性及在给定输入条件下系统的相应动态品质,并对系统进行动态参数设计评定。
基于小扰动假设与系数冻结法,将飞行器扰动运动方程线性化,进一步将变系数的一次近似方程在各特征点固化,得到一组常系数线性微分方程。这组方程的诸特征根中,每一个实根或一对共轭复根都代表一种特定运动,每种特定运动就是一种模态。用研究常系数线性微分方程的稳定性来表示飞行器的运动稳定性,用研究常系数线性微分方程的动态特性来表示飞行器机体的动态特性。
由于飞行器受到干扰后,角运动参数和质心运动参数的变化是按照不同方式进行的,角运动参数的变化非常快,而速度大小变化非常缓慢,可以近似的认为在扰动运动的最初阶段,表现出来的主要是短周期运动。动态特性分析一般比较重视飞行器受扰动后初期的反应特性,故本文主要针对短周期运动进行分析。
1.1 小扰动法理论
如果对扰动运动方程组加以合理的简化处理,使其能够解析求解而又具有必要的工程精确度,这是很有价值的。因为解析解中包含了各种飞行参数和气动参数,可以直接分析参数对飞行器动态特性的影响。常用的方法就是利用小扰动假设将微分方程线性化,通常称为小扰动法。
如果扰动的影响很小,则扰动弹道很接近未扰动弹道,就可以对飞行器运动方程组进行线性化。如果未扰动弹道的运动学参数已经根据弹道学中的方法求得,则只要求出偏量值,扰动弹道上的运动参数也就可以确定了。因此,研究飞行器的扰动运动可以归结为研究运动学参数的偏量变化。这样的研究方法可以得到一般性的结论,飞行器动态特性分析就是建立在小扰动的基础上的。
1.2 小扰动假设
假设由外界干扰引起的运动参数的增量是微量,则在微分方程线性化时,这些运动参数增量的高次项及相互之间的乘积可以略去。
1.3 前提条件
某飞行器为面对称布局,有一个对称面x1oy1,这是将扰动运动分解为纵向扰动运动和侧向扰动运动的必要条件,同时,未扰动运动的侧向参数是一阶微量,就可以忽略所有空气动力的耦合项。
2 特征点的选取
在初始设计阶段,一般只需研究飞行轨迹上某些具有代表性质的特征点的系统特性。用线性化和系数冻结法,使系统简化为常系数的线性系统。这种近似处理方法的合理性是由于飞行器的制导系统(尤其是自动驾驶仪)反应过程比系数的变化来得快,因此,在自动驾驶仪设计中,通常可以采用特征点进行设计。特征点所反映的系统品质能代表飞行器各种可能飞行轨迹的任意点的品质;同时,尽可能的减少所选特征点的数目,以便于计算,通常是状态变化剧烈的点。
选取特征点时,主要考虑下列几方面:
1)速度变化的特殊点:爬升段起点、平飞段起点(终点)、俯冲段终点;
2)高度变化的特殊点:不同的巡航高度、待机高度、末端攻击高度。
3 纵向动态特性分析
3.1 动力系数的确定
动力系数是飞行器扰动运动微分方程组中诸系数的总称,分别表征飞行器的气动阻尼特性、静稳定性、操纵面效率、单位迎角引起的法向过载等。
动力系数取决于飞行器的外形、气动特性、质量分布及运动参数等方面的因素影响。飞行器设计时,应注意选取适当的动力系数组合以满足飞行器动态特性要求。
1)动力系数计算公式
飞行器纵向运动方程组为:

其中:P为沿体轴的发动机推力;Mz为空气动力俯仰力矩,。
为简便起见,引入动力系数a1~a5:
2)动力系数计算结果
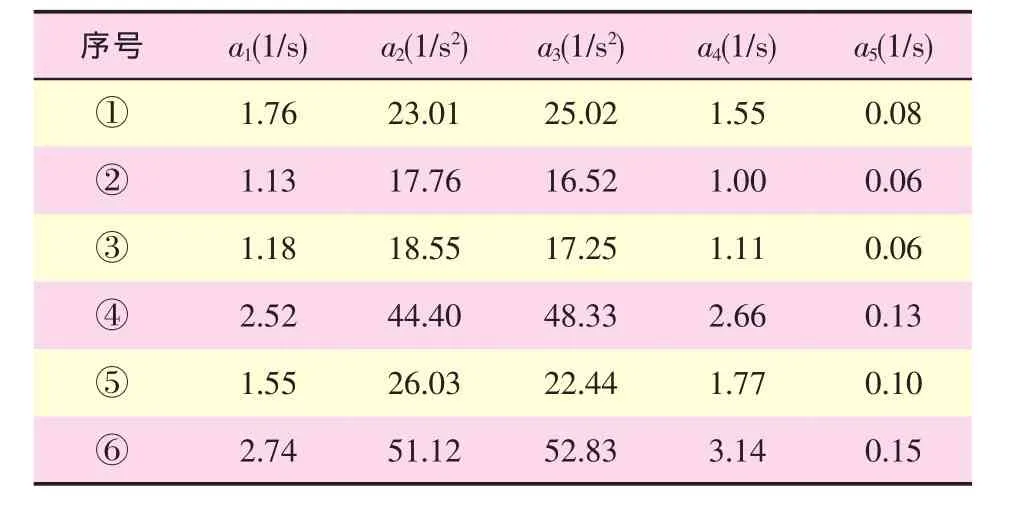
表1 某飞行器纵向扰动运动动力系数计算结果
3.2 稳定性计算分析
1)静稳定性
飞行器受短暂扰动作用后,在扰动消失瞬间若具有恢复原始运动状态的趋势,则称具有静稳定性。飞行器的纵向静稳定性以a2表示,当a2大于0时表示飞行器是静稳定的,反之就是静不稳定的。
从表1中动力系数计算结果可以看出,在各特征点处a2均大于0且数值较大,说明该飞行器在纵向具备较强的静稳定性。
2)动稳定性
飞行器的动稳定性,通常指处于平衡状态下运动的飞行器受扰动偏离原始状态,扰动停止后,若飞行器运动为减幅振动或单调衰减运动,则称飞行器具有动稳定性。
根据表1中的数据可计算得到表2中的数据。
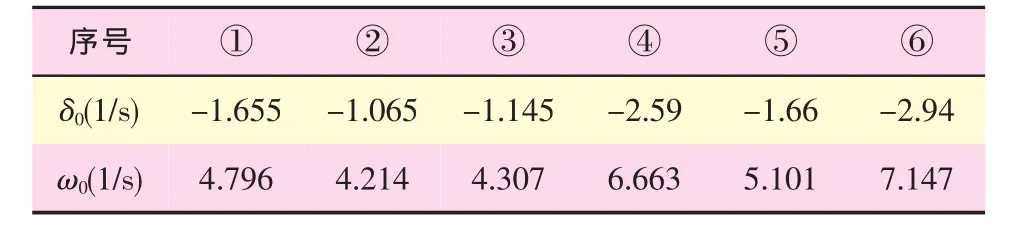
表2 特征方程的根
表2中的根为带有负实部的复根,对应于衰减的振荡运动,其稳定性指标计算可得:
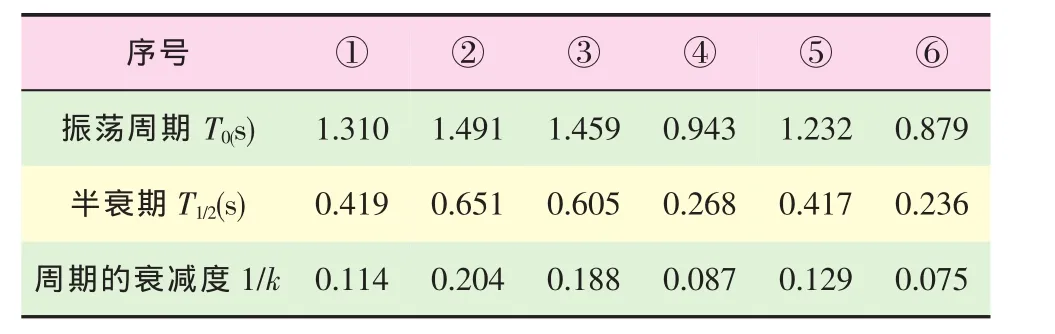
表3 俯仰稳定性指标数据
表3中的数据说明,该飞行器俯仰通道的稳定性指标较好,振荡周期约为1.5s,且很快就衰减了,半衰期约为0.6s,周期的衰减度约为20%。
该飞行器的稳定性指标数据与同类型产品的相应数据相当,可认为其具有良好的动稳定性。
3.3 操纵性计算分析
操纵性是飞行器对操纵机构偏转的反应特性,即飞行器在操纵机构偏转时产生的力和力矩作用下,改变飞行状态的能力及其对操纵面偏转的反应快慢程度,也就是飞行器各运动参数(α,β,θ,ϑ等)对操纵指令的响应特性。
常用飞行器操纵机构按阶跃偏转和谐波规律偏转作为输入时机体的反应来表征飞行器的操纵性。
1)传递函数与传递系数
经典的自动控制理论中,操纵性通常用传递函数及传递系数来表征。
俯仰通道传递函数与传递系数如下:
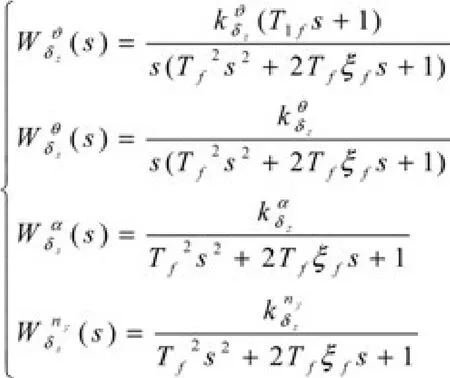
在传递函数公式中,令s=0,可得传递系数,它们表示在阶跃信号作用下输出的稳态值与输入值之比。
各特征点上的值见表4所示。
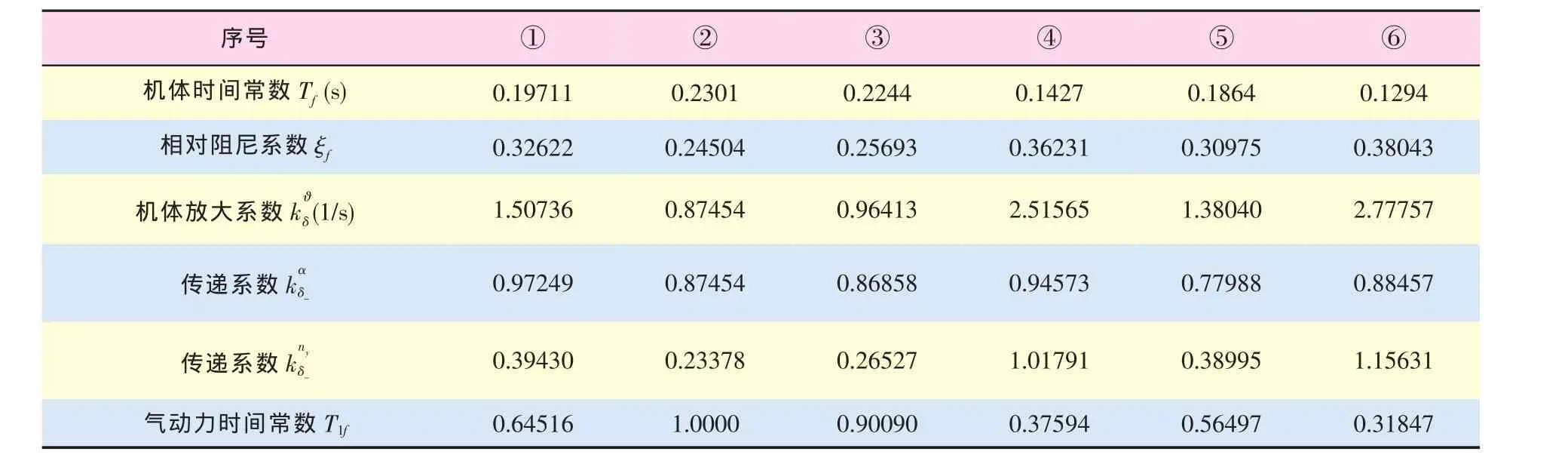
表4 飞行器在各特征点上的数据
2)阶跃过渡过程中的参数计算
当操纵面作阶跃偏转时,飞行器的各运动参数的响应最激烈,在过渡过程中产生的超调量最大,通过最大超调量的研究,可评定飞行器的动态品质。
在自动控制理论中,对阶跃作用下的过渡过程的主要品质指标有:超调量、过渡过程时间、振荡次数等。
计算结果如表5所示。
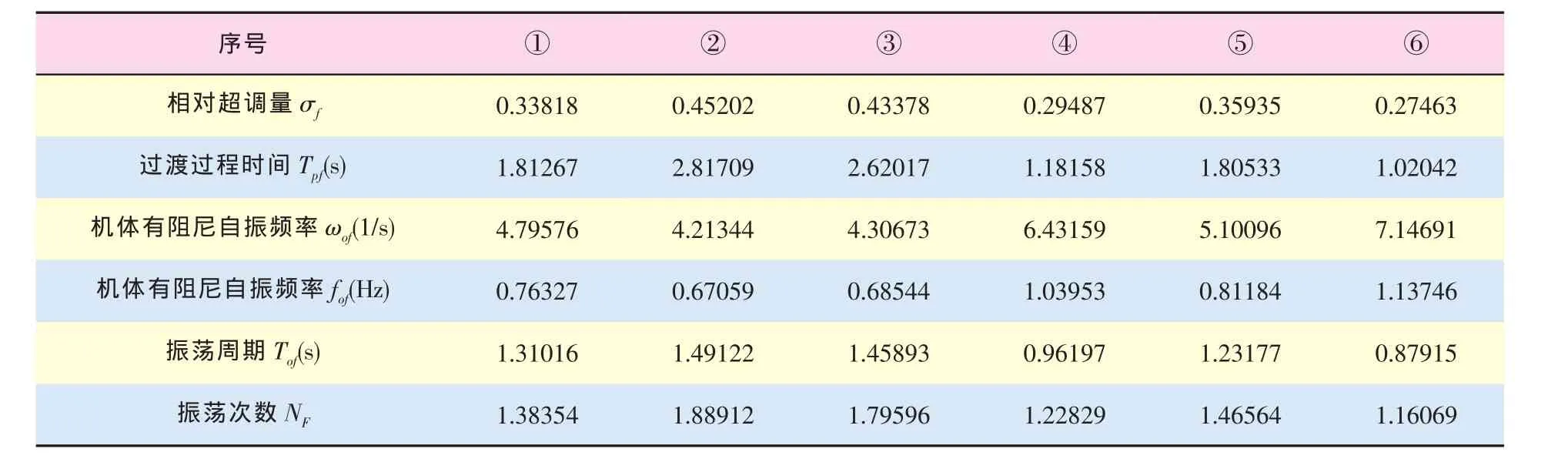
表5 阶跃过渡过程中品质指标数据
表4和表5中的数据表明,相对阻尼较大,可以改善过渡过程,有效抑制机体的振荡和超调量,相对超调量σf<50%;过渡过程时间Tpf<3.0s;振荡次数Nf<2。上述数据均优于某型同类型产品,可见该飞行器在俯仰通道的操纵性较好,俯仰通道受扰动后的过渡过程比较满意。
3)仿真及分析
对升降舵面阶跃偏转扰动的响应过程进行仿真,得到图1~图4的曲线,可直观的评定该飞行器的俯仰操纵性。
从仿真结果可以看出,该飞行器的动态品质良好,纵向各运动参数均很快收敛并稳定,超调量和响应时间都在允许范围内。
4 侧向动态特性分析
4.1 动力系数的确定
某飞行器航向通道动力系数计算结果如表6所示。
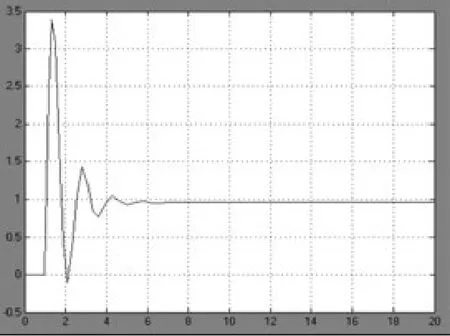
图1 俯仰角速度随时间变化曲线
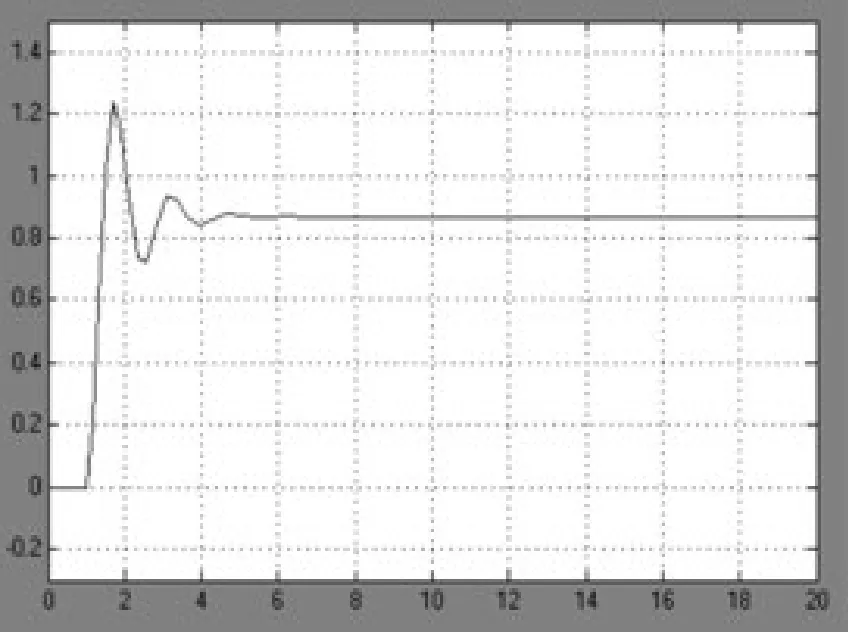
图2 攻角随时间变化曲线
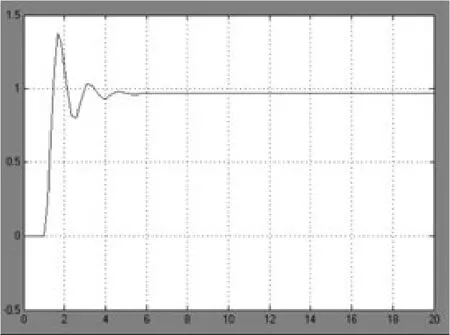
图3 弹道倾角速度随时间变化曲线
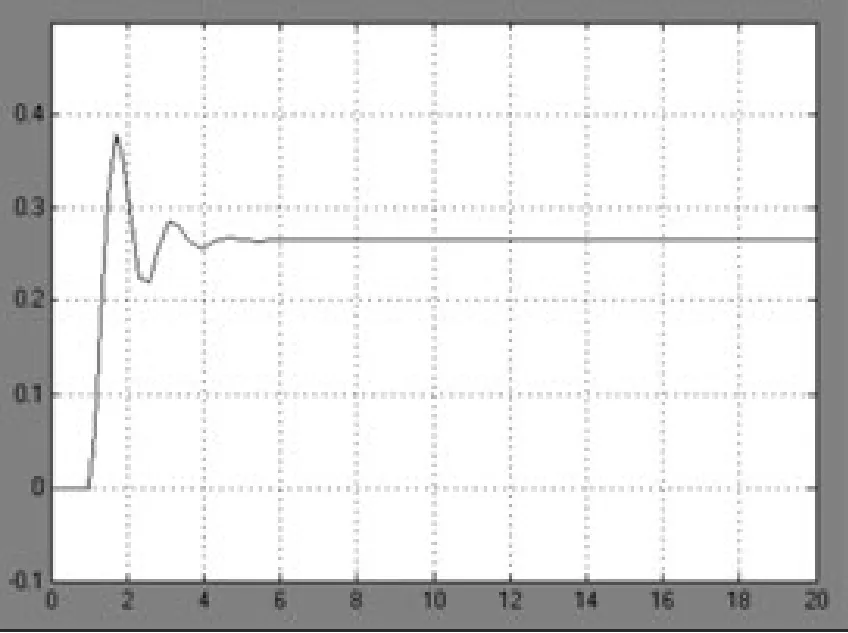
图4 法向过载随时间变化曲线
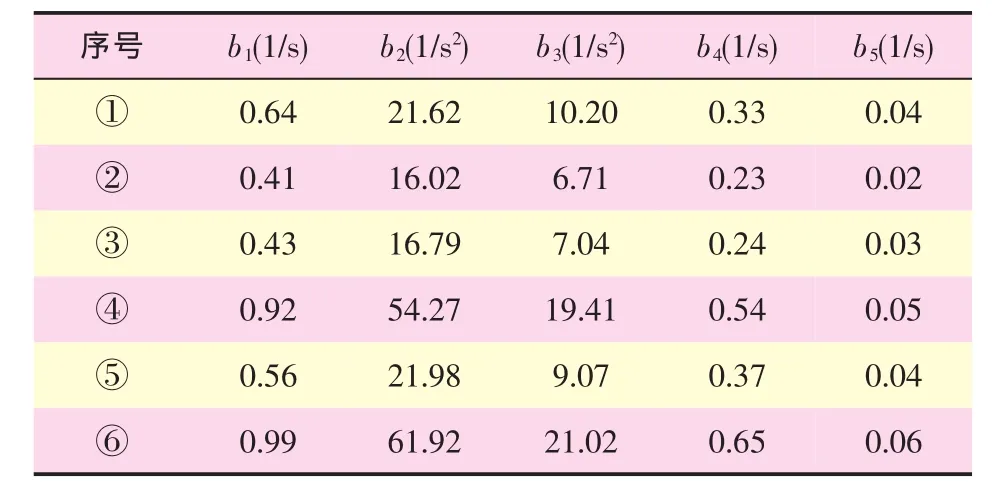
表6 某飞行器航向通道动力系数计算结果
4.2 稳定性计算分析
1)静稳定性
从表6中的动力系数计算结果可以看出,b2均大于0且数值较大,说明飞行器在航向通道具备较强的静稳定性。但b2与a2相比较,可以发现在多个特征点处a2>b2,这说明该飞行器的俯仰静稳定性大于航向静稳定性。
2)动稳定性
航向动稳定性特征方程原理与俯仰通道相同,可得到特征方程的根(表7)。
表7中的复根带有负实部,对应于衰减的振荡运动,其稳定性指标如表8所示。
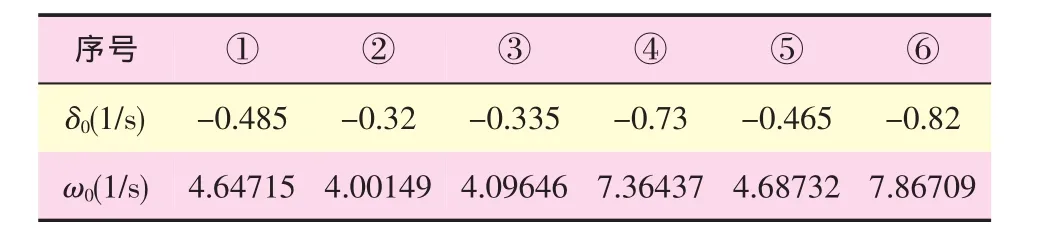
表7 特征方程的根
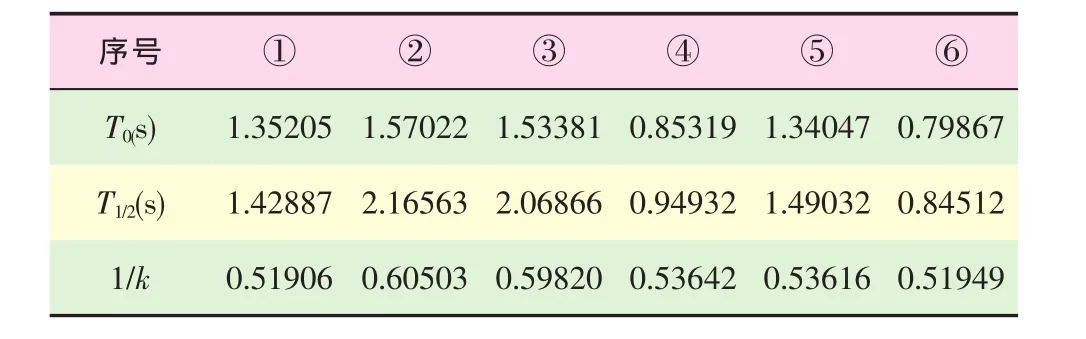
表8 航向稳定性指标数据
表8中的数据表明,飞行器在航向通道的稳定性振荡周期约为1.5s,周期衰减度约为60%。与俯仰方向的数据相当,两个方向上的动稳定性类似。
4.3 操纵性计算分析
航向通道传递系数在各特征点处的计算结果如表9所示。
飞行器受阶跃扰动后过渡过程品质参数如表10所示。
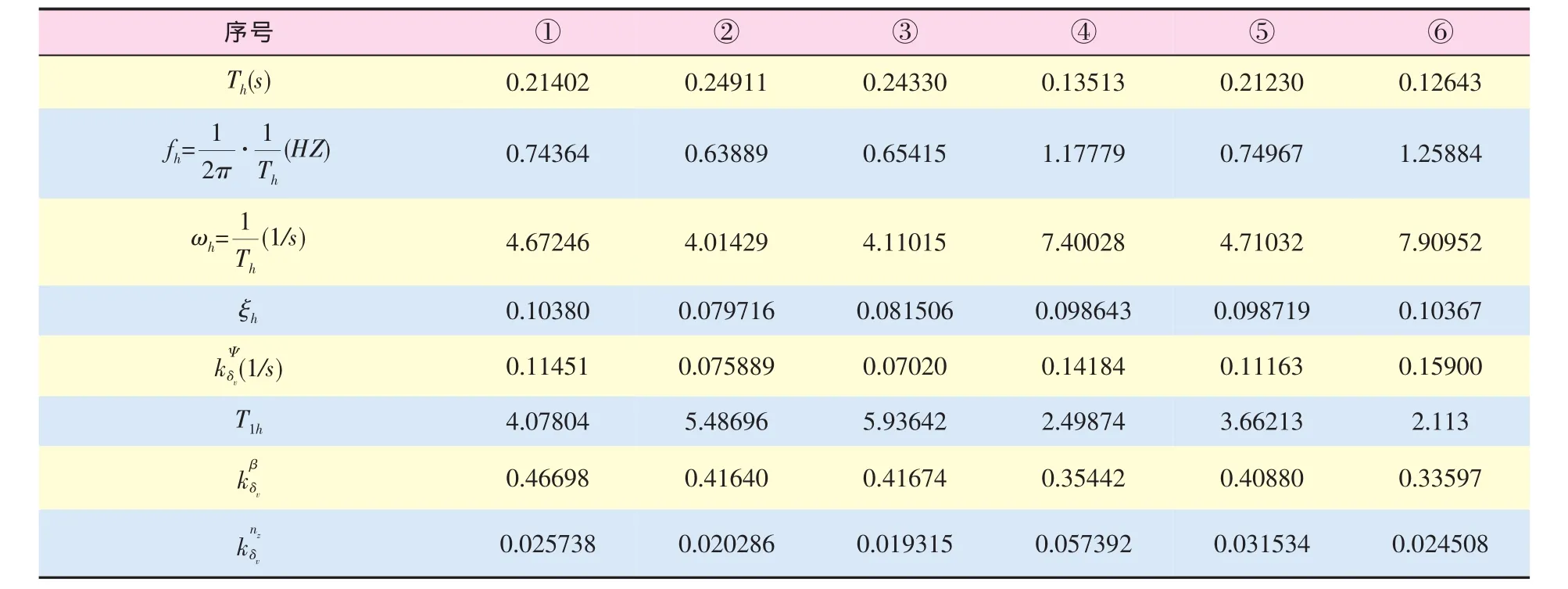
表9 航向通道传递系数计算结果
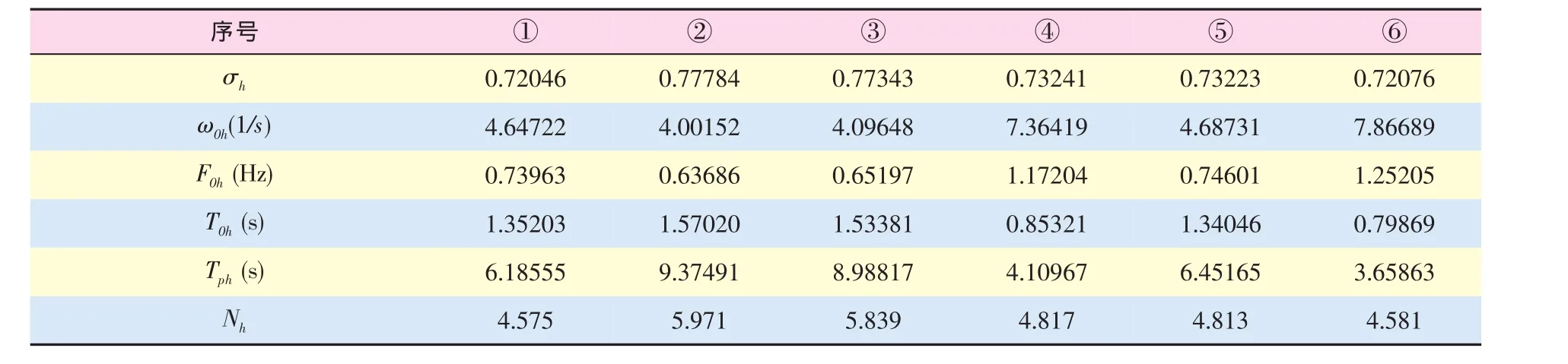
表10 航向通道阶跃过渡过程品质参数
表10中的数据表明,侧向阻尼偏小,造成了过渡过程较长,超调量也较大。该飞行器的阶跃过渡过程的振荡周期小于1.6s,振荡过程时间小于9.0s,振荡次数小于6次。与俯仰通道相比较,航向通道的操纵性较差。
对方向舵面阶跃偏转扰动的响应过程进行仿真,得到图5~图8的曲线。
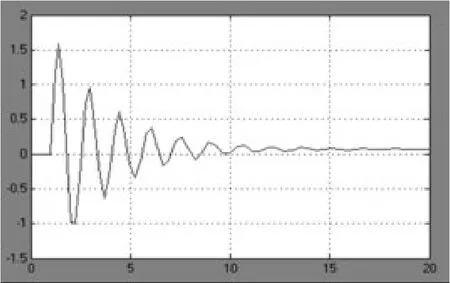
图5 偏航角速度随时间变化曲线
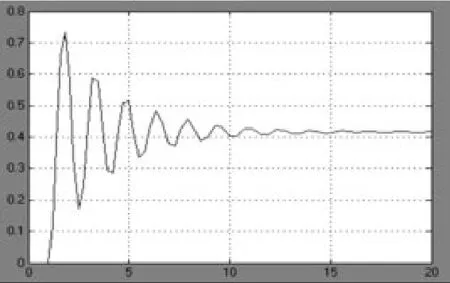
图6 侧滑角随时间变化曲线
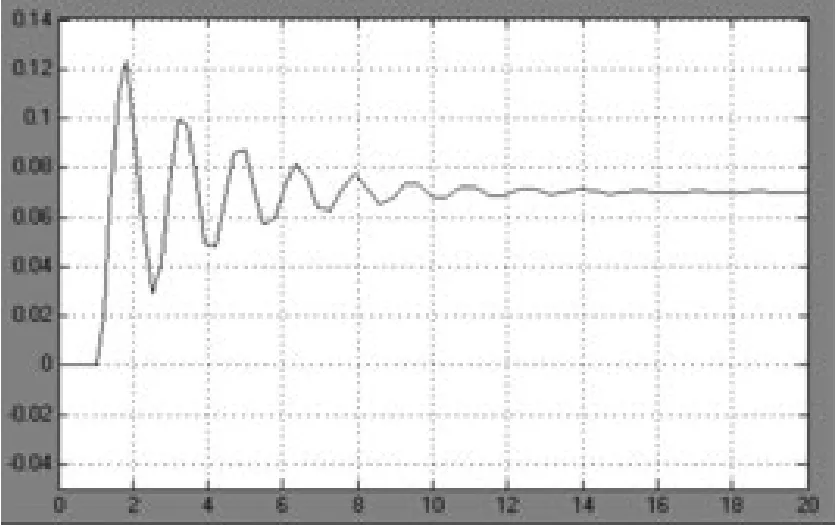
图7 弹道偏角速度随时间变化曲线
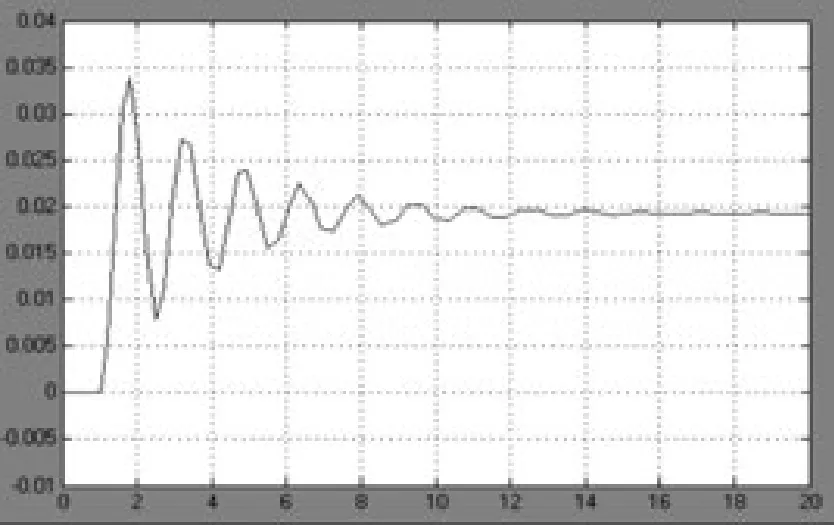
图8 侧向过载随时间变化曲线
从仿真结果来看,该飞行器对方向舵面偏转的响应时间较长,机体侧向阻尼偏小,使侧向运动参数振荡次数较多。另外,单位舵偏产生的侧向过载较小,这也将大大影响飞行器的侧向机动性。但由于该飞行器对航向操纵性和机动性要求较低,故航向操纵性也能满足使用要求。
5 结 论
本文主要针对某飞行器的纵向和侧向动态特性进行探讨和研究,根据该飞行器的气动数据及弹道数据对其稳定性、操纵性等相关参数进行了计算和分析,并对阶跃响应过程进行了仿真,获得了该飞行器的动态特性,归纳如下:
1)该飞行器在俯仰通道的静稳定性和动稳定性良好。对操纵面阶跃偏转的响应积极,过渡过程较好,具有良好的操纵性;
2)该飞行器是航向静稳定的,但航向静稳定度小于其法向静稳定度,动稳定性也较好。对于操纵面阶跃偏转响应过渡过程较长,航向操纵性较其纵向操纵性要差,但能满足使用要求。
[1]李新国,方群.有翼导弹飞行动力学.西安:西北工业大学出版社,2005,1.
[2]许志.高超音速飞行器动力学与动态特性分析.西北工业大学硕士学位论文,2005,3.
[3]钱杏芳,林瑞雄,赵亚男.导弹飞行力学.北京:北京理工大学出版社,2006,7.
[4]谷良贤,温炳恒.导弹总体设计原理.西安:西北工业大学出版社,2004,11.
[5]纪福华.海防导弹设计研制.洪都航空工业集团有限责任公司,2007,7.
[6]张靖男,赵兴锋,郑志强.巡航导弹弹体动态特性分析研究.战术导弹控制技术,2006,4.
[7]潘丰,张开如.自动控制原理.北京:中国林业出版社,北京大学出版社,2006,8.
[8]肖安崑,刘玲腾.自动控制原理与应用.大连:大连理工大学出版社,2006.8
[9]徐敏,严恒元.飞行器空气动力工程计算方法.西安:西北工业大学出版社,2000.
[10]方振平,陈万春,张曙光.航空飞行器飞行动力学.北京:北京航空航天大学出版社,2005,11.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
上海师范大学学报·自然科学版(2022年3期)2022-07-11
舰船科学技术(2022年10期)2022-06-17
现代电力(2022年2期)2022-05-23
内蒙古电力技术(2022年1期)2022-03-18
化工自动化及仪表(2021年6期)2021-11-26
北京航空航天大学学报(2021年7期)2021-08-13
新世纪智能(高一语文)(2021年3期)2021-07-16
沈阳工业大学学报(2020年3期)2020-06-03
电子技术与软件工程(2020年17期)2020-02-02
