
起重机用无线速度传感器设计
2015-04-01 12:19:40姜秀柱
传感器与微系统 2015年12期
李 响,姜秀柱
(中国矿业大学 计算机学院,江苏 徐州221116)
0 引 言
起重机是大型机械设备,具有大车、小车、吊钩等多个运动机构,每个机构上都有电动机、减速机、制动器等多种传动设备。起重机的能效就是总的输出功(或功率)对总的输入功(或功率)的比值。起重机的输出功率则为负载被吊起搬移过程中各移动机构共同输出的机械功率。
机械功率与运动速度有关,要获得负载被搬迁过程中的机械功率,就要测量负载被搬迁过程中的运动速度。
起重机在运行的过程中具有速度大小和方向变化无规律,点动过程速度变化大,起升设备在提升重物的过程中设备和重物摆动,有线设备直接测量难以操作等特点。传统方式中少有使用测量速度的方式检测起重机的输出功率,因此,利用ADXL335 加速度型传感器来间接地测量起重机负载的移动速度,是一种新型的检测起重机输出功率的方式。
在GB/T 22414—2008[1]中,通过测量每一个阶段起重机的运动位移和所需的时间求得单个过程的平均速度,继而求得整个过程的平均速度的方法来测量起重机的运动速度。此种方法求得的是平均速度,无法将此用于测量起重机的机械输出。
蒋剑锋等人[2]通过在机构旋转轴上增加技术齿轮,然后通过光电开关感应产生脉冲信号的方式来测量起重机设备的速度和位置信息。这种方法结构简单,但是需要将其安装在起重机中,安装麻烦。
在市场上还存在编码器测速和速度继电器测速等多种测量速度的方式[3],但适用于在设计、制造对设备进行检测;而在成型的设备中,需要对机械进行拆装,要安装这些设备就造成了极大的麻烦。
综上,传统的各种测量速度的方式都不适用于测量起重机的机械输出而需要的速度(瞬时)的要求,本文提出的利用加速度传感器来测量起重机的实时速度的方式将有效地解决此等问题,同时方便起重机械生产单位对设备出厂的检验。
1 模拟加速度传感器ADXL335
1.1 ADXL335 的组成与原理
本文采用的无线速度传感器是基于模拟加速度传感器ADXL335 构成的。ADXL335 是美国模拟器件公司(ADI)于2009 年推出的一种带有信号调理的高精度模拟三轴加速度传感器,其满量程加速度测量范围为±3 gn,可用于测量倾斜检测应用中的静态重力加速度,以及运动、冲击或振动导致的动态加速度[4]。
图1 为ADXL335 加速度传感器的内部结构图。ADXL335 利用内部的多晶硅微加工制作的微传感器感应三维的加速度。当加速度存在时,传感器中的多晶硅结构的偏移导致差动电容器的电容值发生变化,进而导致积分电路中输出的模拟电压也发生线性变化,最终在Xout,Yout和Zout三个管脚分别输出三个微小的模拟电压值。然后AC初步放大、DEMOD 解调处理、再输出放大,经过RC 低通滤波,最后输出与三轴加速度呈正比的三路模拟电压信号[5]。
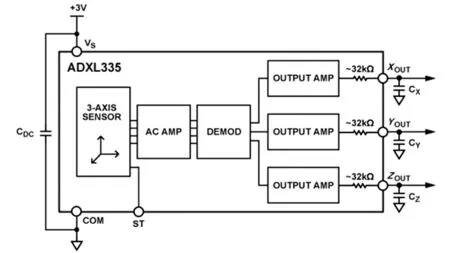
图1 ADXL335 内部结构图Fig 1 Inner structure of diagram of ADXL335
1.2 ADXL335 防噪滤波电容器设计
在ADXL335 的原理图中存在CX,CY和CZ这样三只电容器,通过手册说明,可以利用这三只电容器为传感器设置一只低通滤波传感器。在起重机现场中被测结构的基频都在12 Hz 以下,因此,在Xout,Yout和Zout各管脚各设置一只0.1 μF的电容器,对应的带宽则为50 Hz,这将有效地降低传感器在测量过程中的噪声干扰。
1.3 ADXL335 在速度检测中的应用
ADXL335 型加速度传感器可用于对成本敏感的低功耗运动和倾斜检测应用,也可用于移动设备,游戏系统,磁盘驱动保护,图像稳定以及运动和保健器材[5]。可用于间接地测量物体在运动过程中的速度,其测量速度的应用十分广泛。例如:可用于测量远距离输电电缆的舞动速度[6]、人体的运动状态的速度[7,8],车辆在运行过程中的速度,电机在转动过程中的速度等。将ADXL335 用于起重机负载移动速度的测量尚不多见。
2 ADXL335 的输出数据分析
2.1 ADXL335 静止时输出数据与分析
ADXL335 是对环境十分敏感的器件,在静态不运动状态下具有零点输出,且零点输出随不同的安装方向而不同。其标准安装位置是使Z 轴输出1 gn值,方向垂直向下,输出电压1.2 V,其他两轴输出为0 gn(1.5 V)。但是由于传感器本身存在0 gn偏置的问题,因此,输出的标准值总是波动存在的。
图2 是将ADXL335 标准安装正面向上,水平放置下测得的静态三维加速度零点输出波动。
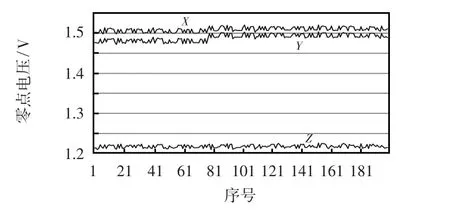
图2 ADXL335 静止时电压偏置图Fig 2 Graph of voltage offset when ADXL335 is static
要研究0 gn偏置的情况,因此,将相邻的两个0 gn值求绝对差。下面分别得到三轴上相邻数据的绝对差折线图,如图3~图5 所示。
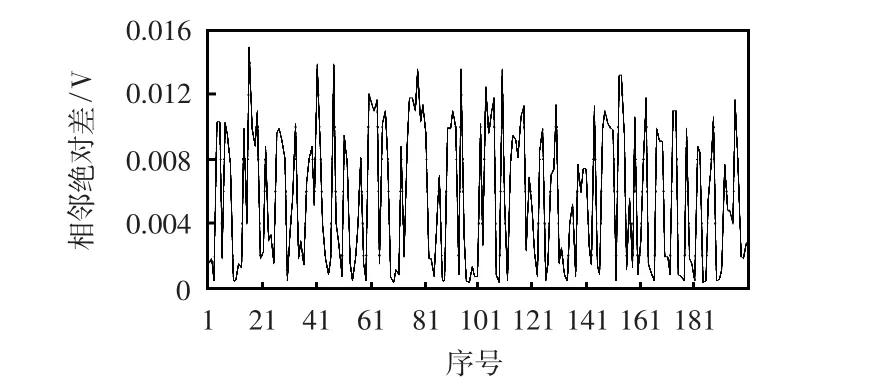
图3 X 轴方向相邻数据绝对差折线图Fig 3 Line graph of absolute difference of neighbor data in X axis
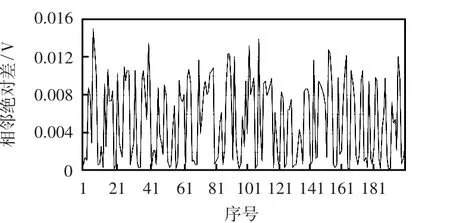
图4 Y 轴方向相邻数据绝对差折线图Fig 4 Line graph of absolute difference of neighbor data in Y axis
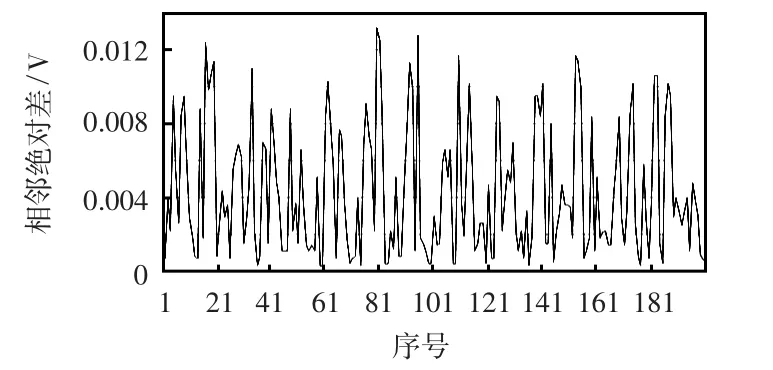
图5 Z 轴方向相邻数据绝对差折线图Fig 5 Line graph of absolute difference of neighbor data in Z axis
通过对多组数据的探测分别得到三轴方向相邻电压的绝对差值的变化范围分别为X[0.015,0.000 3],Y[0.015,0.0003],Z[0.0132,0.0003]。因此,可以将此组数据作为阈值以判断运动的物体在单个方向上是否存在加速度的变化。
2.2 ADXL335 运动时输出数据与分析
ADXL335 加速度传感器在运动的时候,三轴上的加速度值随运动的变化而变化,如图6 所示。
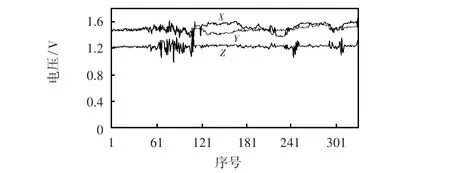
图6 ADXL335 运动时电压偏置图Fig 6 Graph of voltage offset when ADXL335 is runing
在图6 中可以看到:刚开始的时候,传感器做相对平稳的前进,加速度值基本不变;接着传感器进行强烈的变加速和变加速等复杂运动;又接着进行了一段相对平稳的前进,中间参杂一些变加减速运动。由此可判断出该传感器能够有效地反映物体的运动状态。
ADXL335 型加速度传感器输出的加速度数据为连续的模拟电压,本文通过集成单片机CC2430 中的A/D 转换接口模块将该模拟电压值转换成二进制数据,在单片机CC2430 中完成相关计算后,再通过CC2430 中的Zig Bee 无线传输接口模块,传到上位机。传输的数据帧格式如图7所示。帧的第1 个字节表示节点号,起标识作用;第2 个字节表示数据的个数;第3~10 共8 个字节分别用两两字节来表示1~4 个数据通道,用于传输三维方向的加速度数据和该加速度获取时的时间戳;最后一个字表示数据结束标志。通道顺序和对应加速度方向的关系是:通道1 传输X轴加速度值,通道2 传输Y 轴加速度值,通道3 传输Z 轴加速度值,通道4 传输采集时的时间点,即时间戳数据。时间戳数据的变化范围为[0,655 35],将每次获得的时间戳值与上一次获得的时间戳值相减以获取单位运动时间。

图7 传输协议帧格式图Fig 7 Diagram of format of transmission protocol frame
ADXL335 采集的数据为实际的电压值,经过A/D 转换,不能直接作为实际的加速度值使用,因此,根据ADXL335 电压每增加300 mV,g 值加1 的特性,由下列公式计算得到实际的加速度值

式中 Vr为经过A/D 转换后实际采集的电压值;V0为经过A/D 转换后当加速度传感器静止时的电压值;αAD为实际电压A/D 转换系数的倒数,CC2430 做A/D 转换时的技术标准是3 V 的电压代表十进制数8 192,因此,aAD的典型值为3/8 19 2;br为ADXL335 加速度传感器的变比系数,即300 mV/gn;α0为加速度的零点偏置值。
经过以上的计算得到了实际的瞬时加速度值。下面继续说明如何求得起重机运动的实际速度值。由式(2)

可知,在一段时间内,物体的速度等于t2时刻的速度加上在这段时间内速度的变化,那么,任意时刻物体的速度vi就等于

用求和公式表达为

由公式分别求得X 轴、Y 轴和Z 轴上的速度vx,vy,vz后,进行速度的合成,得到合成后的速度

3 基于加速度检测的起重机用无线速度传感器实测数据
3.1 实测环境
起重机的速度的测试环境应该在相应产品规定的工作条件下进行测试,且应满足下列要求:
1)风速应小于3 m/s;
2)测试载荷质量与规定值的偏差不应大于5%,仲裁检验时偏差不应大于±1%,测试载荷质量的精度为±1%;
3)供电系统在起重机馈线接入处的电压波动不应超过额定值的±10%;三相电压不平衡率不应大于1.5%;
4)起升和下降的实际测试高度与规定值的偏差不应大于±5%,仲裁检验时偏差不应大于±1%,测量精度不应小于0.01 m。
3.2 实测数据分析
将传感器绑定于QD 型75/20 t 通用电动吊钩桥式起重机的主起升设备中,起升设备的挂钩中带有16 t 重的载荷(国标要求载荷必须为自重的80%),起重机根据国标要求运行一个周期的基本运行轨迹如图8 所示,测试的数据如图9。
如上图9 所示为起重机运行时X 轴、Y 轴和Z 轴方向的分速度。从启动开始,起重机的启动速度基本趋于零,然后速度平稳的增加,平稳时的速度达到0.61 m/s 左右,QD型75/20t 通用电动吊钩桥式起重机的小车运行速度规格为38.4 m/min,合成后的速度约为0.64 m/s,由此可知速度的偏差值在可接受的范围内。
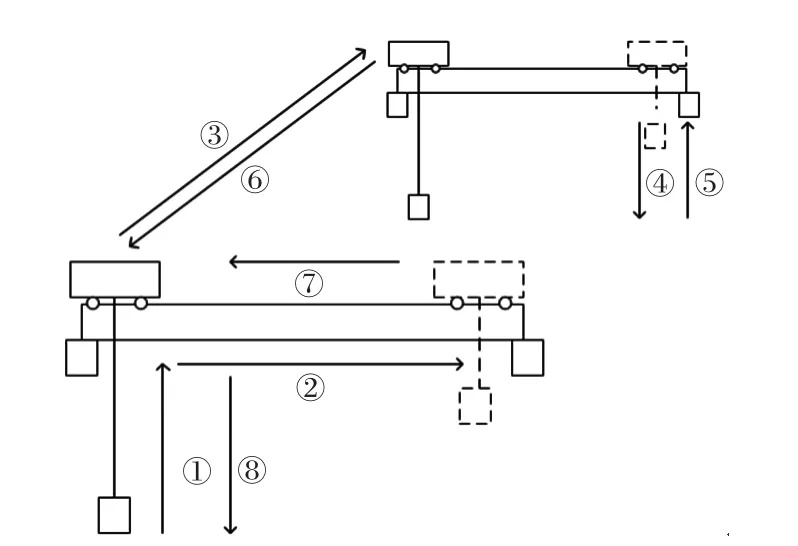
图8 起重机周期运行示意图Fig 8 Diagram of periodic duty of crane
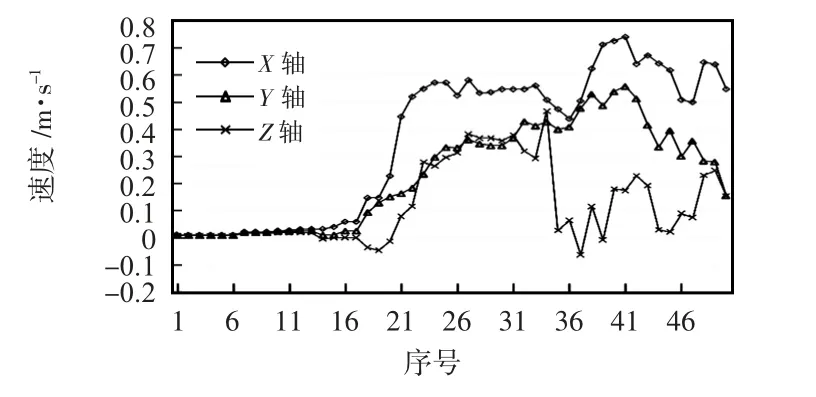
图9 三轴方向速度折线图Fig 9 Line graph of velocity at 3-axis
X 轴方向速度值偏大且波动变化,原因是起重机的起升机构沿着接近ADXL335 传感器敏感度轴的X 方向运动,并且速度不断增加;Y 轴方向基本平稳,波动幅度偏小,原因是起重机在敏感度轴的Y 方向基本没有运动或运动幅度偏小;Z 轴方向速度变化稍大,有负值,原因是起重机的起升机构不仅沿着敏感度轴的X 方向运动,并且沿着Z 轴方向在上升,负值出现的原因是由于起升设备提升重物时的摆动,导致重力势能的值时高时低。
与图9 不同,图10 表示合成的三轴方向的速度值。观察可知,和三轴方向的速度值基本趋于一致,由平稳到加速运动的一个过程。
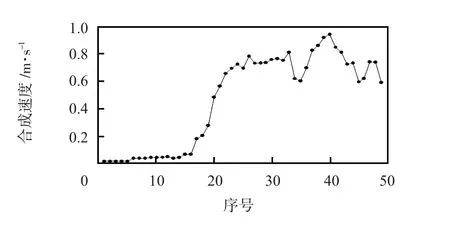
图10 合成速度折线图Fig 10 Line graph of compound velocity
4 结 论
通过以上的分析和实验,利用ADXL335 三维加速度集成电路和CC2430 芯片,本文设计了一个实现无线传输的加速度传感器,并通过上位机软件的设计实现了基于加速度测量的速度的计算。为起重机运行机构的速度检测和输出机械功率的计算提供了有效的手段。
[1] GB/T 22414—2008 起重机速度和时间参数的测量[S].
[2] 蒋剑锋,陆纪法.桥式起重机位置和速度测量装置的研发及应用[J].装备制造技术,2011(3):157-158.
[3] 朱国忠,韦彩虹,潘 敏.基于三维加速度传感器的人体运动能耗检测算法的研究[J].传感技术学报,2011,24(8):1217-1222.
[4] 蒋志龙,张大女.基于ADXL335 的堆煤传感器的设计[J].工矿自动化,2012(8):87-89.
[5] ADXL335 中文手册[Z].
[6] 孙求国.输电线路舞动在线监测技术研究[D].广州:广东工业大学,2012.
[7] 李文锋,吴 翔,孙 俊,等.基于加速度传感器的人体姿态跟踪角度算法[J].湖北工业大学学报,2011,26(4):1-3.
[8] 侯文生,蔡 全,吴小鹰,等.基于加速度计的手指运动姿态检测[J].传感器与微系统,2012,31(1):146-148.
猜你喜欢
当代水产(2022年6期)2022-06-29 01:12:20
计算机应用(2022年2期)2022-03-01 12:33:42
计算机应用(2021年4期)2021-04-20 14:06:36
计算机应用(2021年1期)2021-01-21 03:22:38
汽车观察(2018年12期)2018-12-26 01:05:42
中国特种设备安全(2018年10期)2018-12-18 02:16:46
金桥(2018年4期)2018-09-26 02:24:46
劳动保护(2018年8期)2018-09-12 01:16:14
石油化工建设(2018年2期)2018-07-11 01:24:56
船舶标准化工程师(2015年5期)2015-12-03 11:00:24
